NXT 工作头 OF 工作头使用说明.pdf - 第45页
QD117-03 7. 元件数据 OF 工作头使用说明书 37 Actual Pick up Body Hei ght 如果吸取高度与元件的高度相对 应, 则不需要进行此项设置, 吸爪会根据 Pickup Height 的 指定将元件夹紧 ( 包括考虑吸取偏移和元件方 向 )。 但是,由于某些原 因如元件的形状使得 元件高度和夹紧的高度不一致 时, 就必须要指定吸取时的高度 ( 包括考虑吸取偏移和 元件方 向 )。请参考以下插图。 Cl…
7. 元件数据 QD117-03
36 OF 工作头使用说明书
Process-Pick
Offset Q
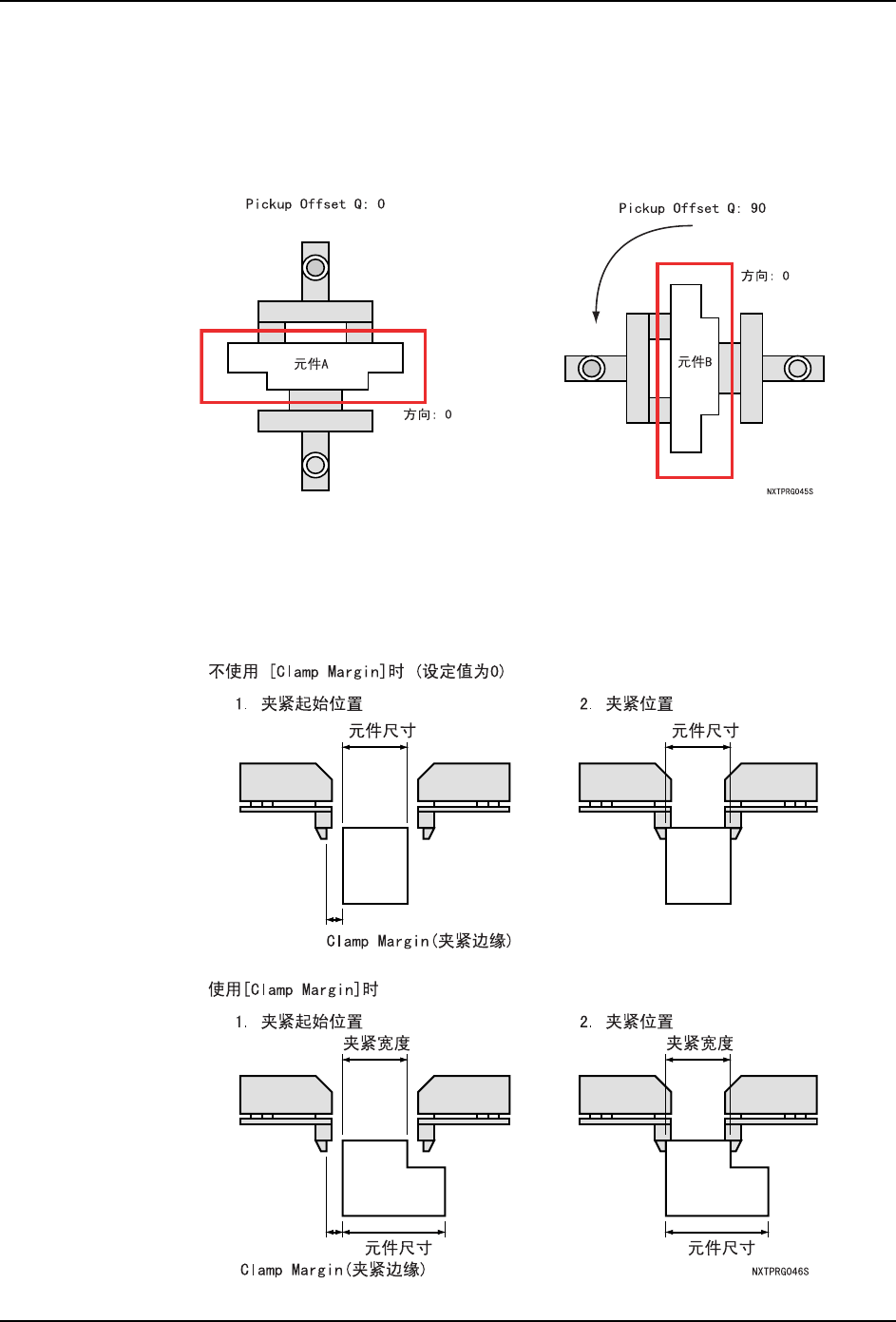
通常,由于吸嘴的形状是园形的,所以吸取元件时的角度旋转设定毫无意义。但是,当使用
吸爪的时候,会有必要设定吸取元件时吸爪的旋转角度。当要把吸爪定位在某一角度以便于
吸取元件时,就要设定所需的角度。请参考以下插图。
Clamp Width
如果夹紧位置与元件的尺寸相对应,则不需要进行此项设置,吸爪会根据元件尺寸的大小将
元件夹紧 ( 包括考虑吸取偏移和元件方向 )。但是,由于某些原因如元件的形状使得主体尺
寸和夹紧时的大小不一致时,就必须要指定夹紧时的尺寸 ( 包括考虑吸取偏移和元件方向
)。请参考以下插图。
QD117-03 7. 元件数据
OF 工作头使用说明书 37
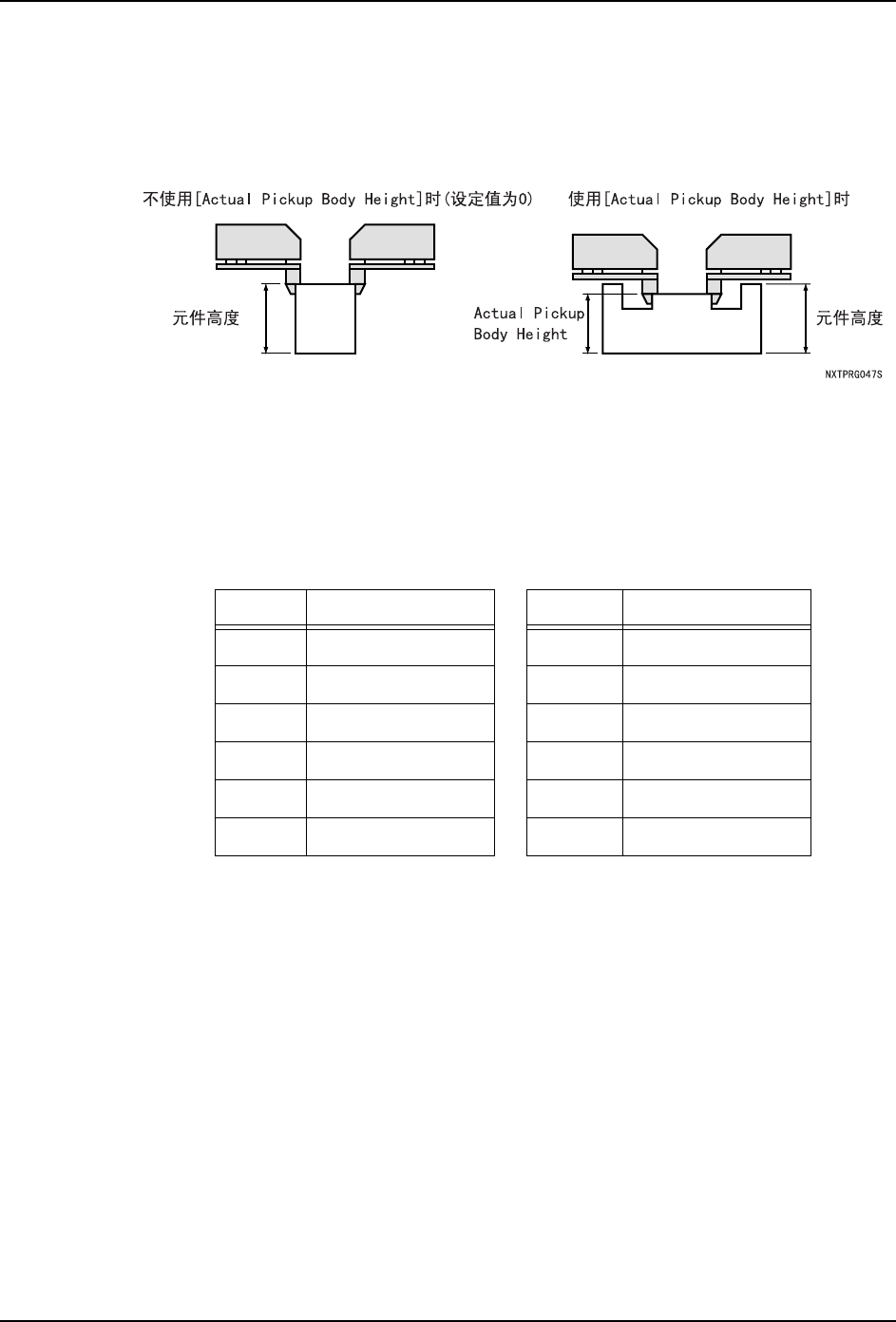
Actual Pickup Body Height
如果吸取高度与元件的高度相对应,则不需要进行此项设置,吸爪会根据 Pickup Height 的
指定将元件夹紧 ( 包括考虑吸取偏移和元件方向 )。但是,由于某些原因如元件的形状使得
元件高度和夹紧的高度不一致时,就必须要指定吸取时的高度 ( 包括考虑吸取偏移和元件方
向 )。请参考以下插图。
Clamp Margin
当使用吸爪吸取元件时,指定从夹紧开始位置到抓紧元件为止移动的距离。请参照 Clamp
Width 项的插图。
Motor Gripping Force
当使用吸爪吸取元件时,指定机械爪的元件保持力。如果设置为 “0” 则元件的保持力为
6.7N。该数值每增大 “1” 时保持力随之增加 0.5N。
设置值 元件保持力 (N) 设置值 元件保持力 (N)
0 6.7 6 9.7
1 7.2 7 10.2
2 7.7 8 10.7
3 8.2 9 11.2
4 8.7 10 11.7
5 9.2 - -
7. 元件数据 QD117-03
38 OF 工作头使用说明书
Process Place
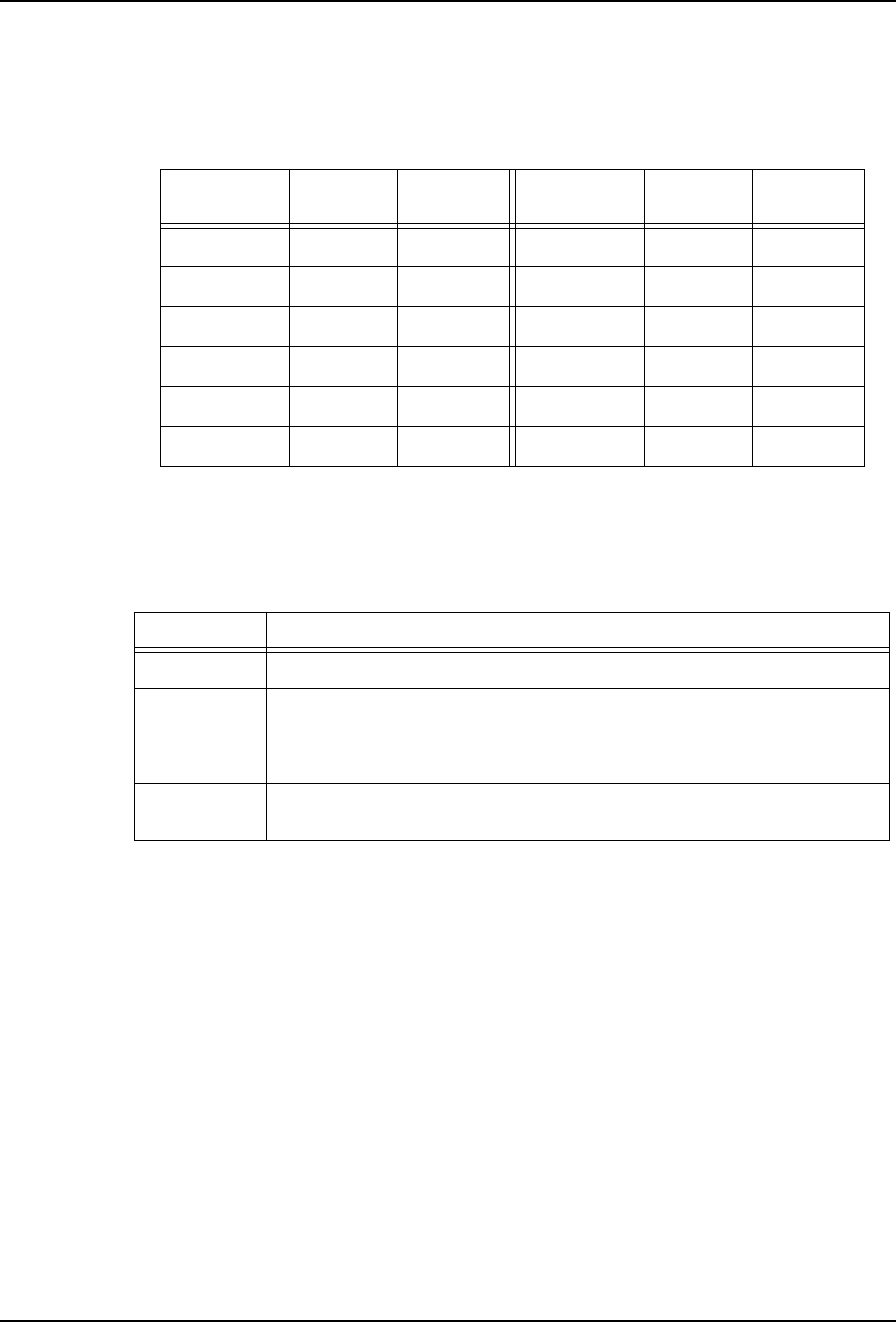
Soft Place Speed
进行元件贴装时,设定吸嘴或吸爪的下降上升的速度和加速度。默认的设定值为 "0.0",此
时以最高速进行贴装。要以比此低的速度进行贴装时,请参照下表进行调节。
Place Motion Selection
指定在进行元件压入时中使用的加压 ( 力矩控制 ) 方法。默认值为 “0”,此时此项功能无
效。输入 1-4 之间的任一个数值则会启动压入贴装。如果输入值为 5,则不能使用压入贴装
功能,但此时抓取元件时元件的上面与吸爪壁之间的间隙将为 0mm ( 通常间隙为 0.5mm)。
Place Thrust Pressure
指定在使用压入贴装功能时的压力 (在 [Place Motion Selection]中选择了 1-4 的设置
值时 )。(单位:N)
设定值 速度 (%) 加速度
(%)
设定值 速度 (%) 加速度
(%)
0.0 33 100 5.1
~ 6.0 6 68
0.1
~ 1.0 1 20 6.1 ~ 7.0 7 76
1.1
~ 2.0 2 30 7.1 ~ 8.0 8 84
2.1
~ 3.0 3 40 8.1 ~ 9.0 9 92
3.1
~ 4.0 4 50 9.1 ~ 10.0 33 100
4.1
~ 5.0 5 60 - - -
设定值 说明
0 不能使用压入贴装功能。
1 - 4 此范围内任何数值时动作相同,元件进行通常的吸取 / 抓着,在贴装时
根据 [Placing Thrust Pressure]中的指定数值进行压入贴装。如果力
矩没有达到贴装高度范围所要求的数值,就会发生错误且不能贴装元
件。
5 不能使用压入贴装功能。使用吸爪抓取元件时,元件的上面与吸爪壁之
间的间隙将会为 0mm( 通常间隙为 0.5mm)。能正常贴装元件。