OM-1268-012w_NP01001.pdf - 第97页
64 Tg1 109-ID-SO 13.6データの編集 1009-007 13.6.4 装着データ (P データ ) 装着 P データの編集画面です。 U データの設定および装着 P データの追加、削除、編集を行うことが できます。 P データは、最大 100,000 ステップまで編集可能です。 Fig.40 装着 U データ ユニットコントロール ユニットのコントロールコードを設定します。 オフセット X オフセット座標 X を…
63-1
Tg1109-ID-SO
13.6データの編集
1009-001
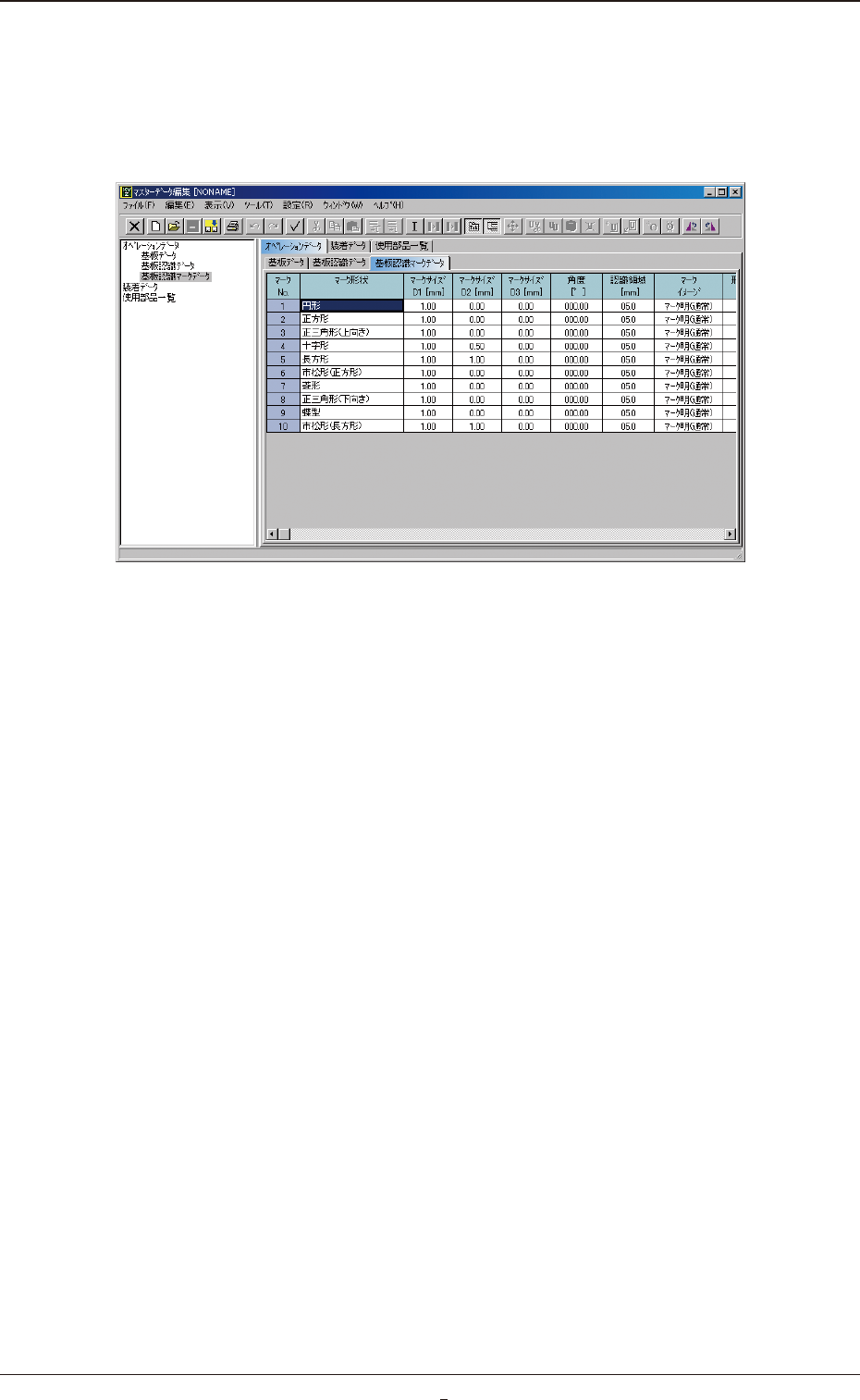
13.6.3 オペレーションデータ ( 基板確認マークデータ )
オペレーションデータにある基板認識マークデータの結果画面です。
基板認識で使用する各基板認識マークのデータに対応します。
10 種類のマーク No. を編集可能です。
Fig. 39-1
マーク No.
基板認識で使用する各基板認識マークのデータに対応します。
マーク形状
基板認識マークの形状を選択します。
マークサイズ D1、マークサイズ D2、マークサイズ D3
基板認識マークのサイズを設定します。
角度
基板認識マークを時計回り方向へ回転させる角度を設定します。
認識領域
基板認識における認識領域を設定します。
マークイメージ
カメラ画像でのマークパターンのイメージを選択します。
形状判定レベル
認識マークの形状判定レベルデータを設定します。
照明レベル
同軸、リング、オプション
各照明の輝度レベルを選択します。
64
Tg1109-ID-SO
13.6データの編集
1009-007
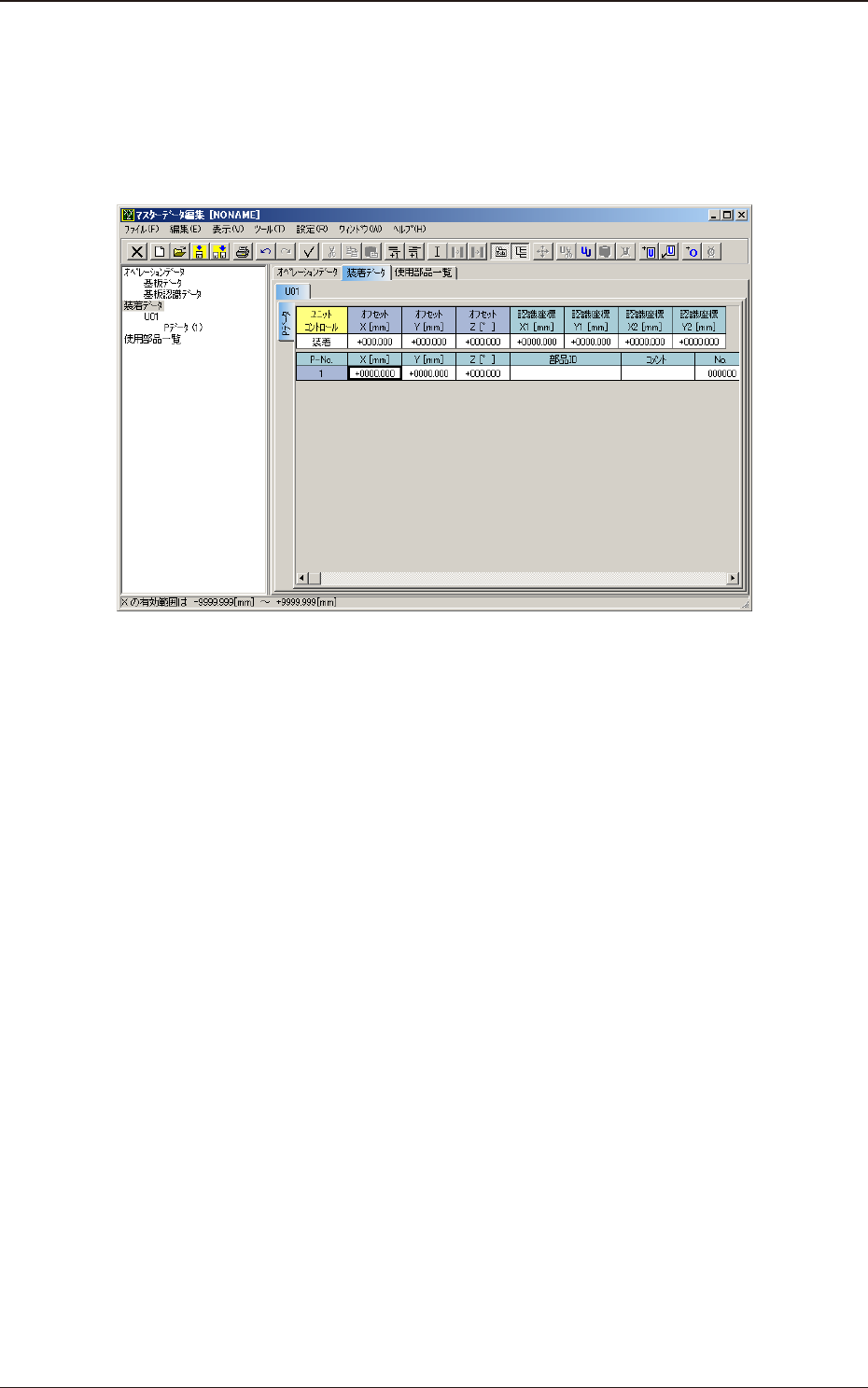
13.6.4 装着データ (P データ )
装着 P データの編集画面です。
U データの設定および装着 P データの追加、削除、編集を行うことが
できます。
P データは、最大 100,000 ステップまで編集可能です。
Fig.40
装着 U データ
ユニットコントロール
ユニットのコントロールコードを設定します。
オフセット X
オフセット座標 X を設定します。
オフセット Y
オフセット座標 Y を設定します。
オフセット Z
オフセット角度 Z を設定します。
認識座標 X1
割り基板認識座標 1 点目 X 座標を設定します。
認識座標 Y1
割り基板認識座標 1 点目 Y 座標を設定します。
認識座標 X2
割り基板認識座標 2 点目 X 座標を設定します。
認識座標 Y2
割り基板認識座標 2 点日 Y 座標を設定します。

65
Tg1109-ID-SO
13.6データの編集
1009-007
装着 P データ
X
装着座標 X を設定します。
Y
装着座標 Y を設定します。
Z
装着角度 Z を設定します。
部品 ID
部品 ID を設定します。
コメント
コメントを設定します。
No.
No. を設定します。
NC データのレーン番号を設定します。
C
コントロールコードを設定します。
シンボル
部品シンボルを設定します。
X1
個々認識座標 1 点目 X 座標を設定します。
Y1
個々認識座標 1 点目 Y 座標を設定します。
X2
個々認識座標 2 点目 X 座標を設定します。
Y2
個々認識座標 2 点目 Y 座標を設定します。