JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第127页
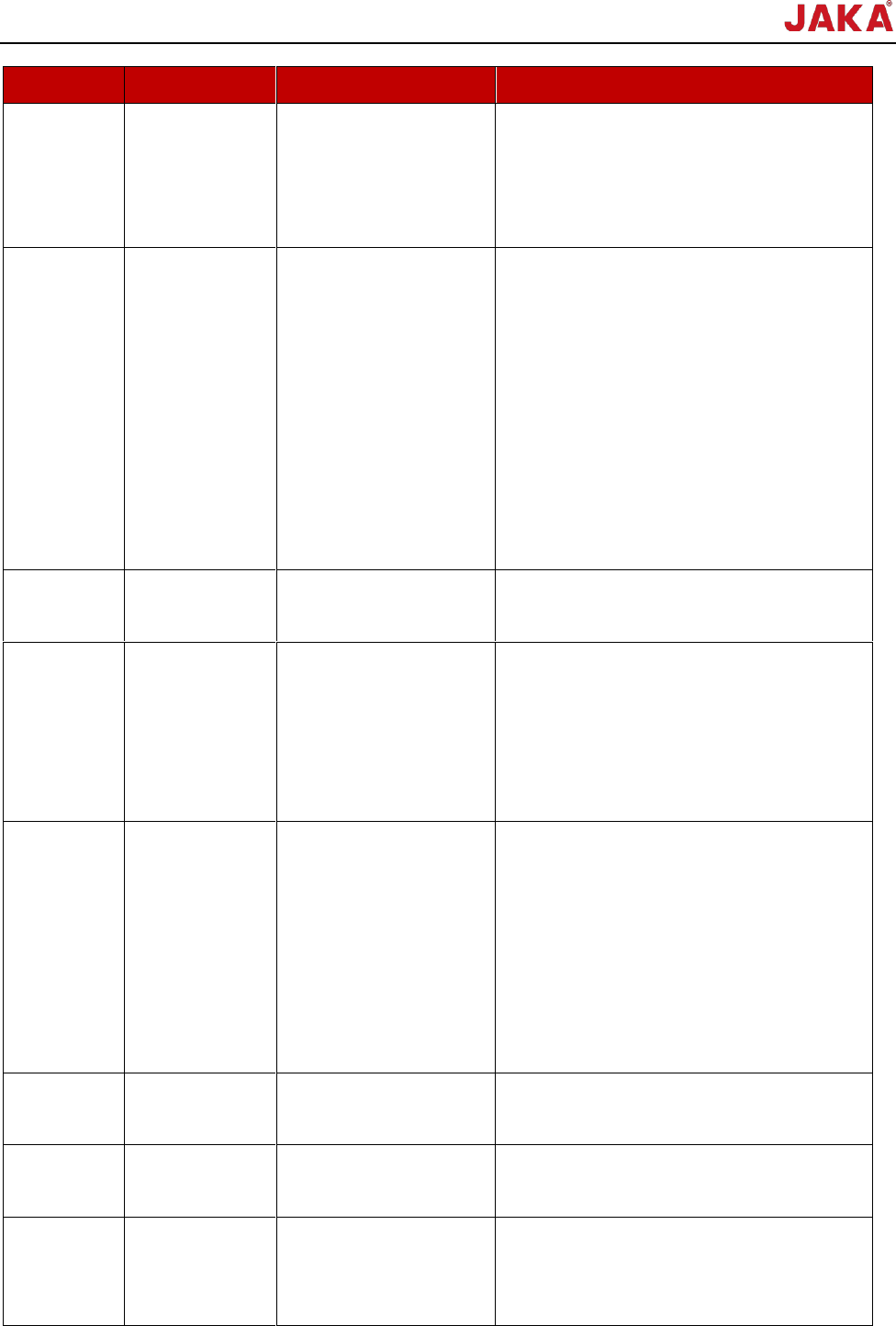
文档版本: 3.1 127 / 201 节卡服务手册 错误代码 描述 原因 措施 人实际输出力矩与前馈 力矩偏差超出一定范围 时,则报该错并下使 能。 0x0F0029 添加圆弧运动指 令失败 添加圆弧运动示教的三 点共线或有奇异位置 1). 请检查圆弧运动的起 点、中间点、终点 是否重合; 2). 请检查圆弧运动的起 点、中间点、终点 是否是奇异位置; 0x0F0030 关节速度限制被 设置为 0 关节速度的限制值为 0 检查 APP…
文档版本:3.1 126 / 201 节卡服务手册
错误代码
描述
原因
措施
器人的 DH 参数、动力
学参数以及各项限制均
可能错误,谨慎上使能
控制。
0x0F0022
机器人序列号无
效
机器人序列号无效。控
制器软件支持特定的机
器人型号,特定的机器
人型号具有特定的编码
规则。实际机器上机器
人的序列号从伺服读
出,如果序列号不满足
支持的型号与规则,则
会报错。
APP 信息页面查看机器人序列号,查看机器
人本体实际序列号,检查序列号是否配置正
确。如序列号正确,请联系节卡技术服务人
员获取最新版本。
0x0F0023
负载辨识轨迹索
引无效
系统内部发送错误
重新进行负载辨识;更新控制器;联系节卡
技术服务人员获取支持。
0x0F0024
倍率模式下无法
设置倍率
倍率模式下无法设置倍
率。该错误一般在机器
人处于倍率模式或者保
护性停止模式下进行倍
率设置。
请检查机器人当前是否处于倍率模式,如果
是请先退出倍率模式,再设置倍率;如果机
器人未处于倍率模式,请确认当前软件版
本,并联系节卡技术服务人员。
0x0F0025
负载辨识轨迹定
义不满足规范
负载辨识轨迹定义不满
足规范。机器人负载辨
识需要满足一定的约束
以保证辨识结果的准确
性。用户输入不满足提
示要求时,会提示该问
题。
请按照 APP 负载辨识界面的提示的轨迹规
范进行操作,重新进行负载辨识。
0x0F0026
关闭电源之前请
下使能
关闭电源之前请下使能
请先下使能再关闭电源。
0x0F0027
程序运行期间不
能下使能
程序运行期间不能下使
能。
请先停止程序,再下使能。
0x0F0028
负载设置存在偏
差
负载设置存在偏差 请检
查。机器人上使能后进
行负载自检。如果机器
1)请检查负载质量和质心设置是否正确;
2)请检查机器人型号、序列号是否正确识
别。
文档版本:3.1 127 / 201 节卡服务手册
错误代码
描述
原因
措施
人实际输出力矩与前馈
力矩偏差超出一定范围
时,则报该错并下使
能。
0x0F0029
添加圆弧运动指
令失败
添加圆弧运动示教的三
点共线或有奇异位置
1). 请检查圆弧运动的起点、中间点、终点
是否重合;
2). 请检查圆弧运动的起点、中间点、终点
是否是奇异位置;
0x0F0030
关节速度限制被
设置为 0
关节速度的限制值为 0
检查 APP 安全设置界面中的“关节速度限
制”值是否有被设置为 0°/s
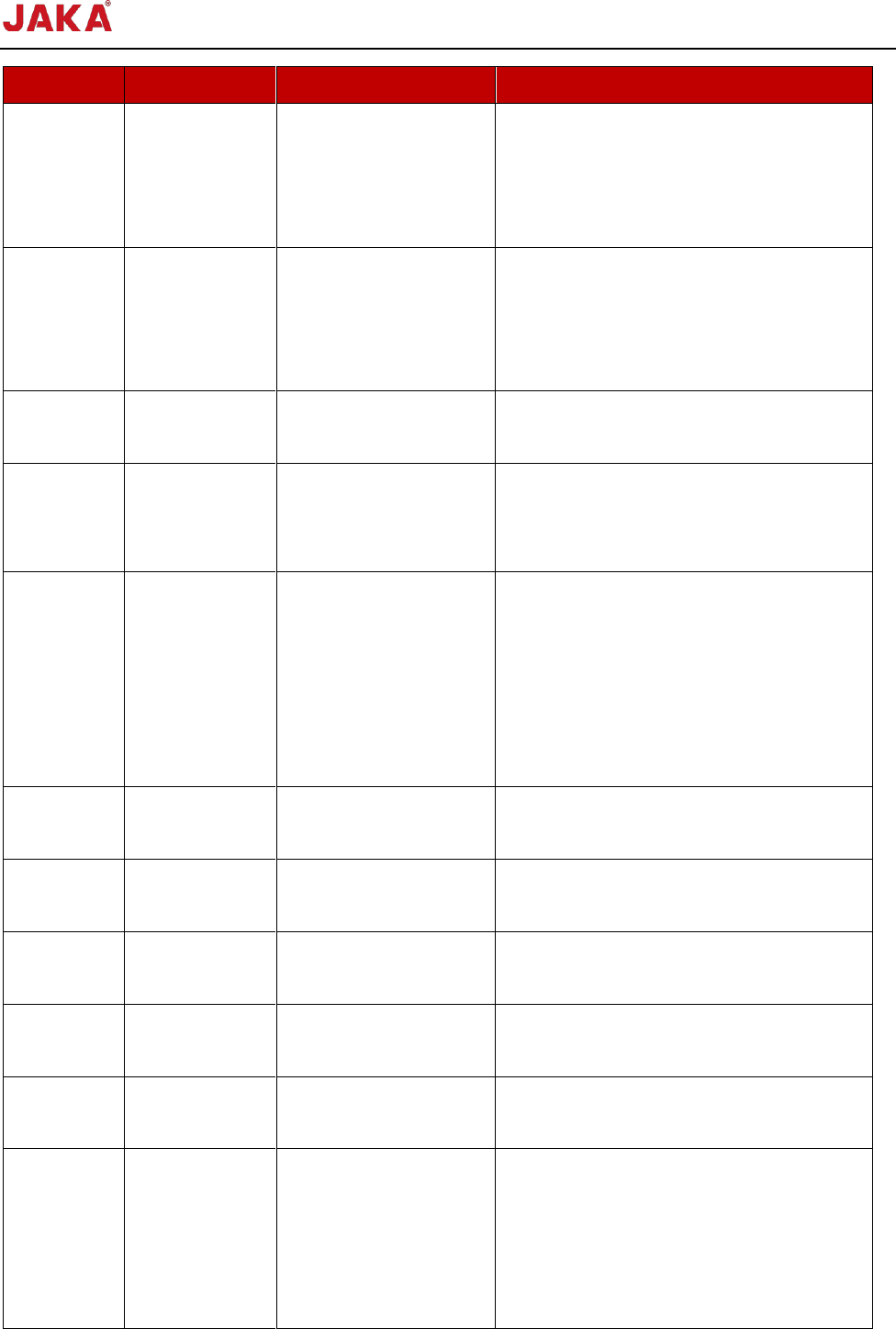
0x0F0031
三位置使能限制
安全设置中配置并开启
三位置使能安全功能。
三位置使能安全功能对于机器人控制存在约
束情况,请检查三位置开关状态,或根据安
全情况选择关闭三位置使能功能。
0x0F0032
无法对直线或圆
弧运动外的运动
类型进行跟踪
传送带跟踪只能对笛卡
尔空间运动类型进行跟
踪,而传送带跟踪模块
中嵌套了直线运动和圆
弧运动以外的运动类
型。
请检查传送带跟踪中是否嵌套了非直线运动
和圆滑运动的其他运动类型模块;
0x0F0038
添加关节运动指
令失败
关节运动段设置不合理
1)请确认当前机器人关节位置和目标关节位
置是否正确
0x0F0039
TCP 标定示教
点重复
示教点中存在两个或两
个以上示教点重合
请重新标定 TCP,并确保没有重合的点位;
0x0F003A
机器人运动过程
中不允许下使能
机器人运动过程中不允
许下使能
请先停止操作机器人再下使能
0x0F003B
机器人已上电,
无需重复上电
机器人已上电无,无需
重复上电
机器人已上电无,无需重复上电
0x0F003C
机器人已使能,
无需重复使能
机器人已使能,无需重
复使能
机器人已使能,无需重复使能
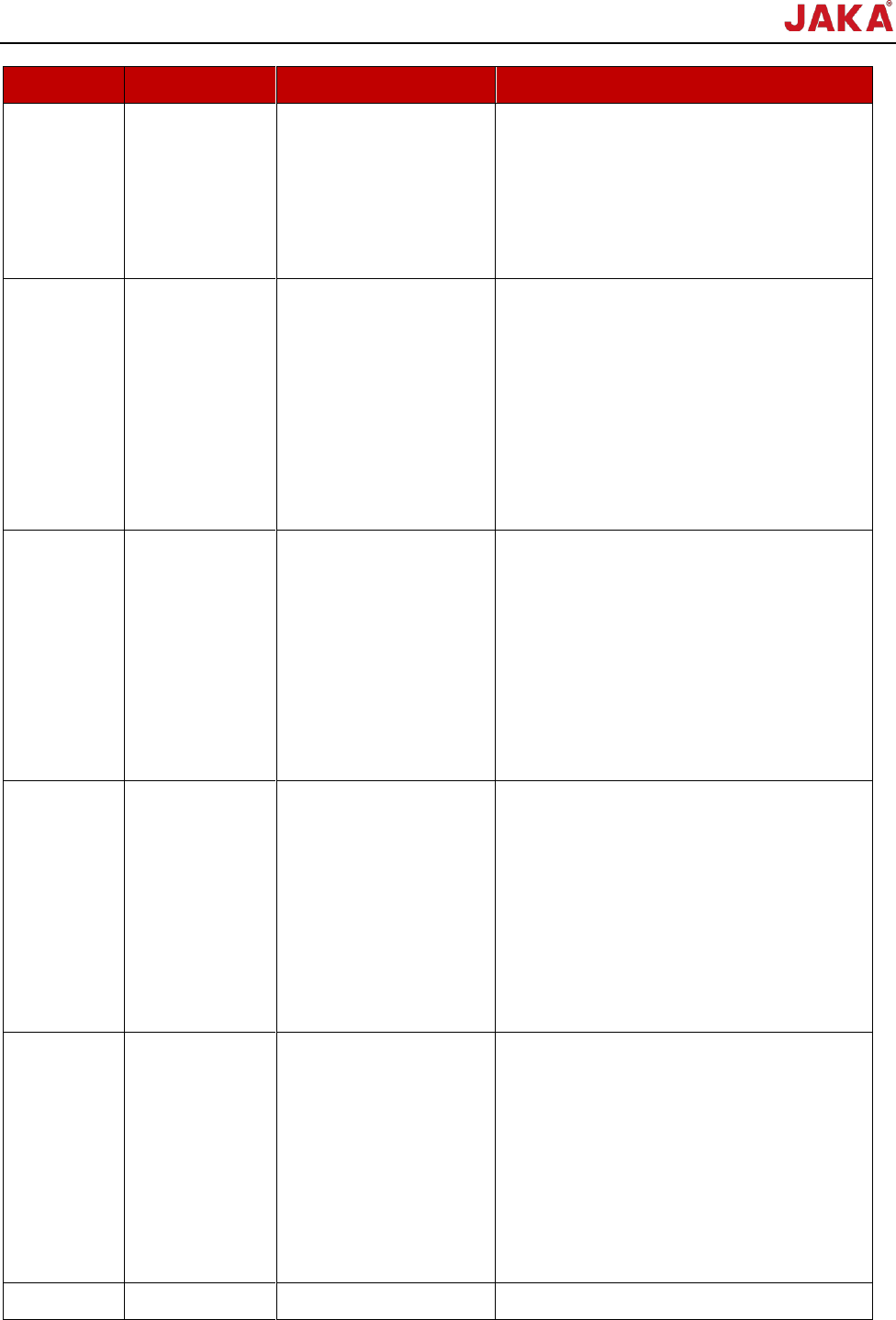
0x000030
关节一运动速度
超过限制
关节一运动速度超过限
制。该错误一般在控制
器下发指令超出关节实
际限速时报错。
1)请确认当前机器人的速度约束是否曾被
人为修改提高,如是请联系节卡技术服务人
员;
2)如果未修改过但报错,请确认降低速度
或加速度约束是否能够消除现象;如果仍然
文档版本:3.1 128 / 201 节卡服务手册
错误代码
描述
原因
措施
出现,请将相应诊断信息导出,并联系节卡
技术服务人员。
0x010030
关节二运动速度
超过限制
关节二运动速度超过限
制。该错误一般在控制
器下发指令超出关节实
际限速时报错。
1)请确认当前机器人的速度约束是否曾被
人为修改提高,如是请联系节卡技术服务人
员;
2)如果未修改过但报错,请确认降低速度
或加速度约束是否能够消除现象;如果仍然
出现,请将相应诊断信息导出,并请联系节
卡技术服务人员。
0x020030
关节三运动速度
超过限制
关节三运动速度超过限
制。该错误一般在控制
器下发指令超出关节实
际限速时报错。
1)请确认当前机器人的速度约束是否曾被
人为修改提高,如是请联系节卡技术服务人
员;
2)如果未修改过但报错,请确认降低速度
或加速度约束是否能够消除现象;如果仍然
出现,请将相应诊断信息导出,并请联系节
卡技术服务人员。
0x030030
关节四运动速度
超过限制
关节四运动速度超过限
制。该错误一般在控制
器下发指令超出关节实
际限速时报错。
1)请确认当前机器人的速度约束是否曾被
人为修改提高,如是请联系节卡技术服务人
员;
2)如果未修改过但报错,请确认降低速度
或加速度约束是否能够消除现象;如果仍然
出现,请将相应诊断信息导出,并请联系节
卡技术服务人员。
0x040030
关节五运动速度
超过限制
关节五运动速度超过限
制。该错误一般在控制
器下发指令超出关节实
际限速时报错。
1)请确认当前机器人的速度约束是否曾被
人为修改提高,如是请联系节卡技术服务人
员;
2)如果未修改过但报错,请确认降低速度
或加速度约束是否能够消除现象;如果仍然
出现,请将相应诊断信息导出,并请联系节
卡技术服务人员。
0x050030
关节六运动速度
关节六运动速度超过限
1)请确认当前机器人的速度约束是否曾被