JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第33页
文档版本: 3.1 33 / 201 节卡服务手册 4. 打开伺服调试软件 ,输入机器人 IP 地址 ,点击“连接” 。 注:请使用最新版本( 1.1.9.21 ) 的伺服调试软件。 5. 点击【生产】 ,选择 更换的 关节,点击【 读取参数】 ,在 9009 序列 号框内输入 更换关节的 序列号,点 击【设置 】。
文档版本:3.1 32 / 201 节卡服务手册
2.2.4 升级程序
当更换关节后,为保证关节正常运行,需进行如下操作。
2.2.4.1 关节序列号写入
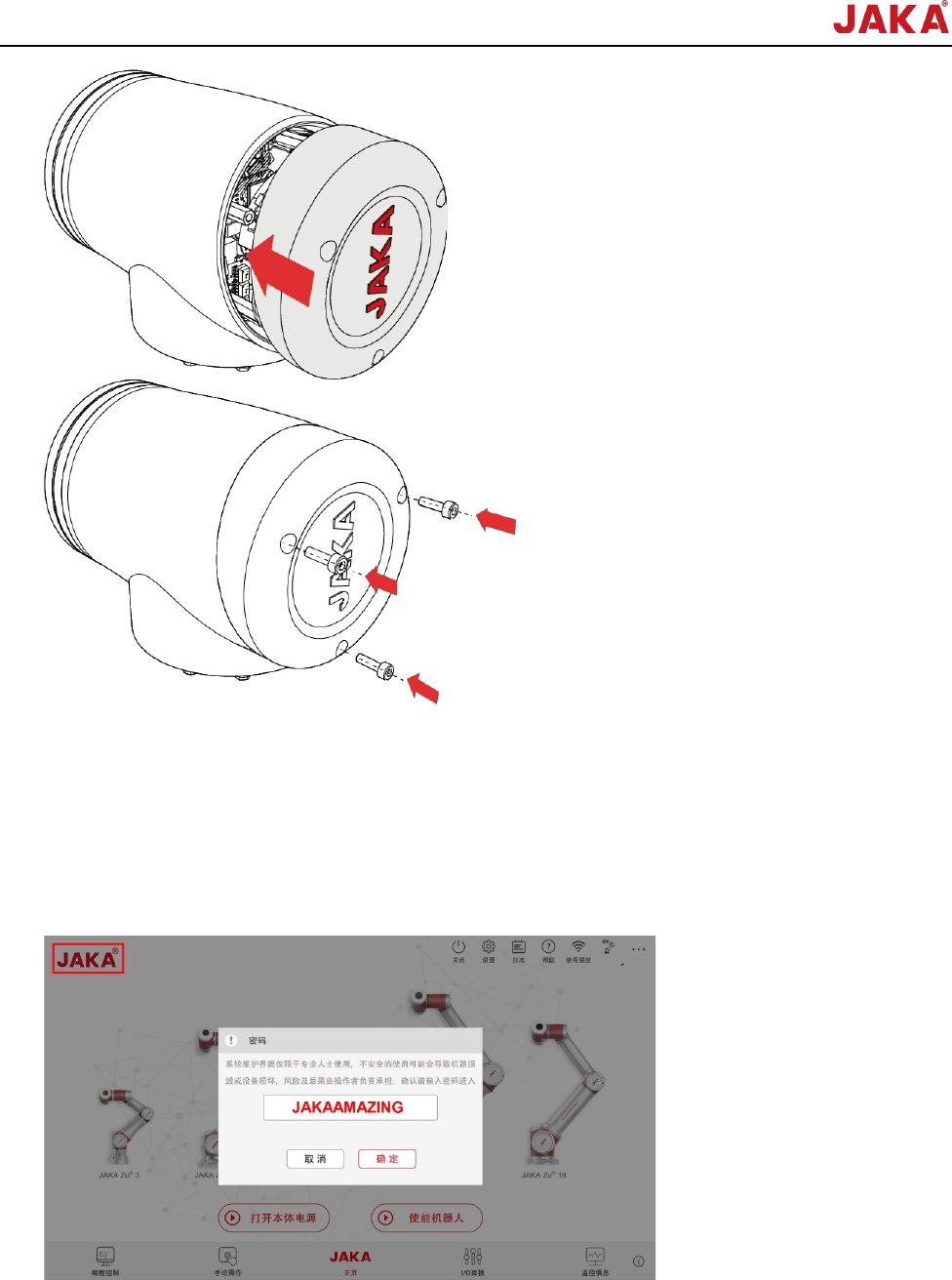
1. JAKA Zu APP 连接机器人,并使机器人处于上电、下使能状态;
2. 连续点击页面左上角“JAKA”, 输 入 密 码 , 点 击 “ 确 认 ”, 进 入 系 统 维 护 界 面 ;(注 : 密 码 是
JAKAAMAZING);
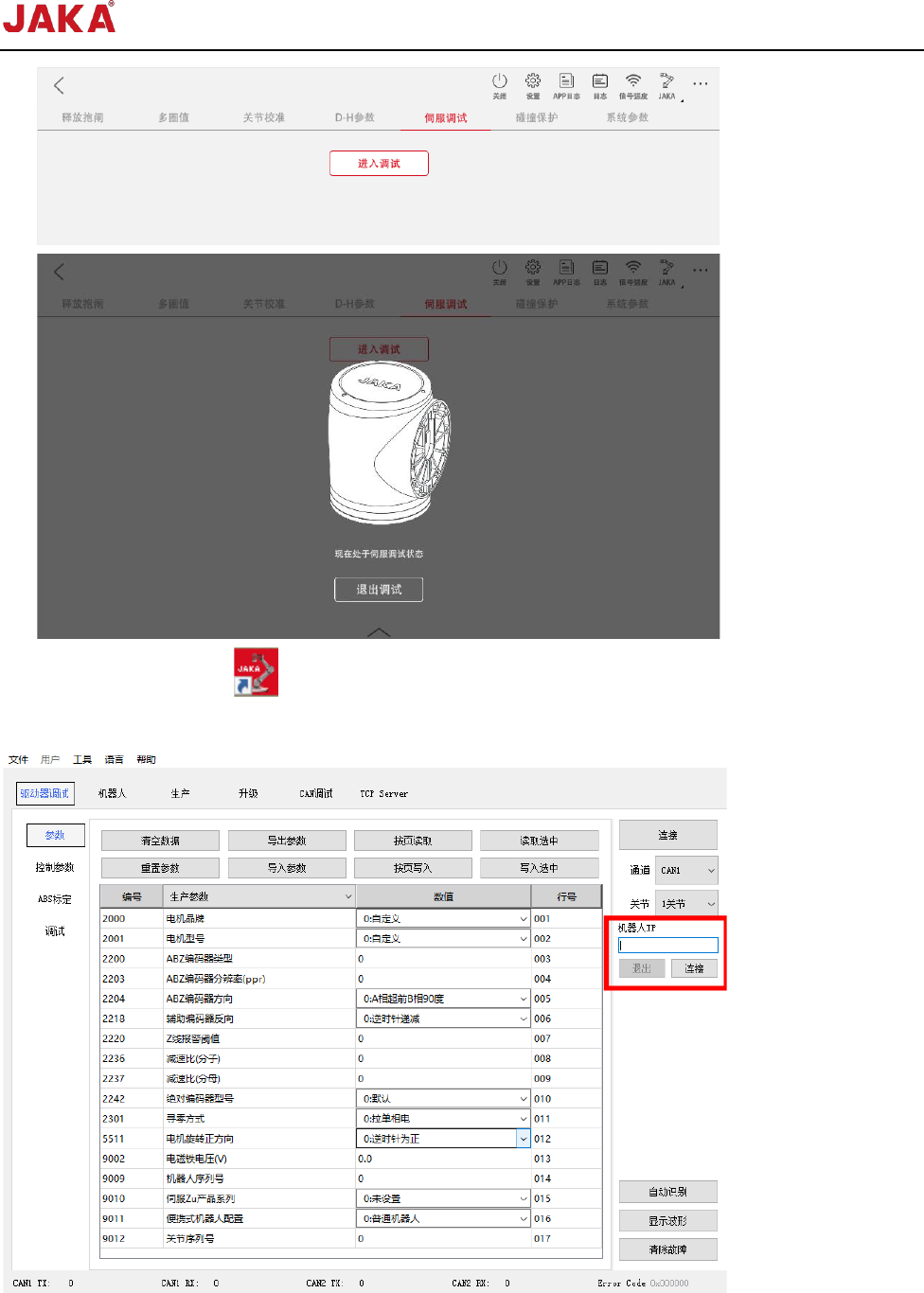
3. 点击【伺服调试】→【进入调试】进行调试。
文档版本:3.1 33 / 201 节卡服务手册
4. 打开伺服调试软件 ,输入机器人 IP 地址,点击“连接”。
注:请使用最新版本(1.1.9.21)的伺服调试软件。
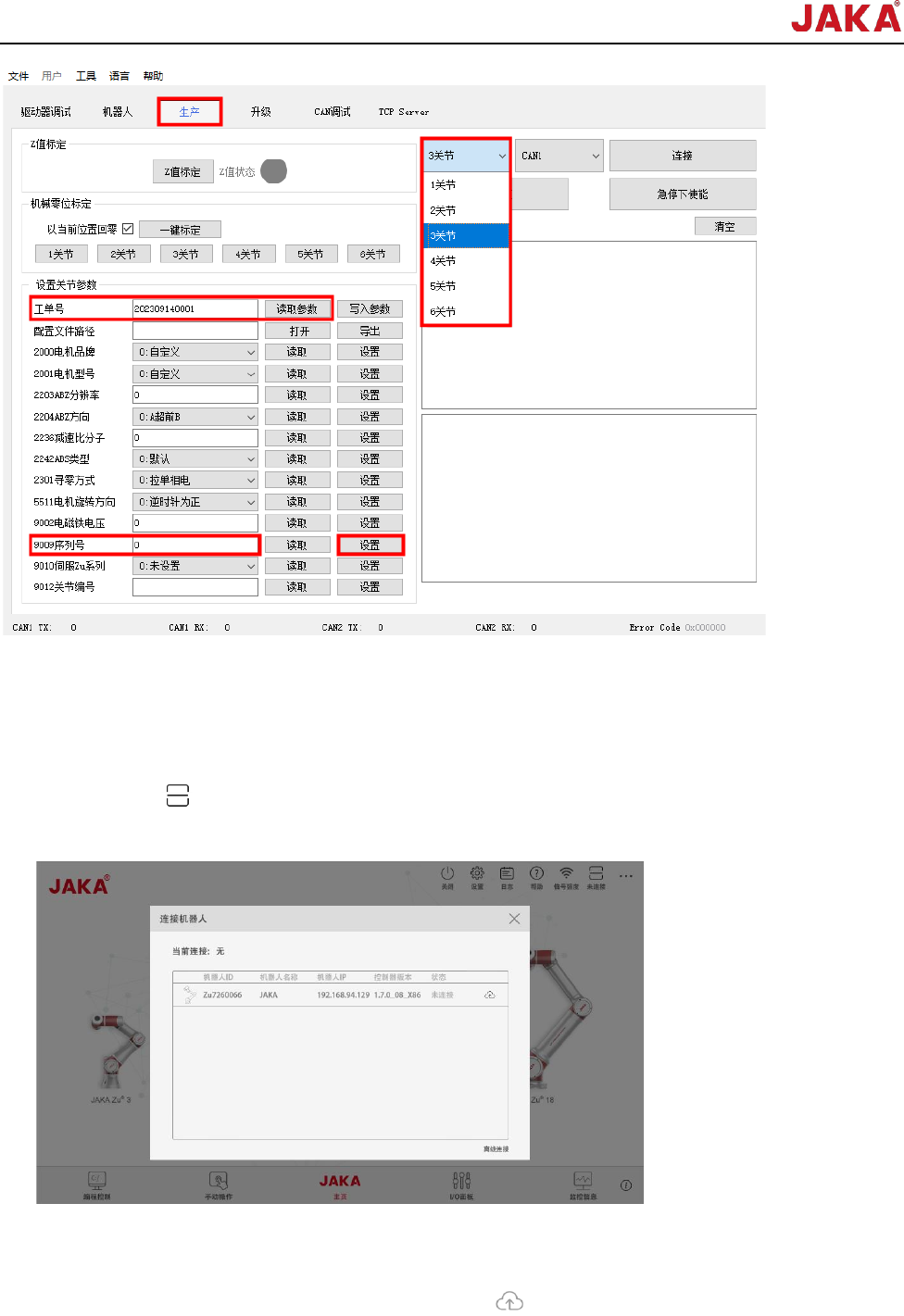
5. 点击【生产】,选择更换的关节,点击【读取参数】,在 9009 序列号框内输入更换关节的序列号,点
击【设置】。
文档版本:3.1 34 / 201 节卡服务手册
2.2.4.2 升级伺服
1. 连接机器人
1)将带有 JAKA Zu APP 的设备连接到控制柜相同的局域网内;
2)打开设备中的 JAKA Zu APP;
3)点击右上角 找到对应的机器人进行连接(CAB V2.1 控制柜自带 Wi-Fi 模块,使用手柄启动控制柜
后,在设备中可以搜索名称为控制柜编号的 Wi-Fi 并连接,用户也可以自行选配路由器)。
2. 升级伺服
点击【设置】→【系统设置】→【版本升级】进入伺服升级界面,点击“请选择文件”的白框,上传伺服
升级包(升级包的名称不可修改,必须保持原文件名),点击 图标上传升级包;