JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第200页
文档版本: 3.1 200 / 201 节卡服务手册 错误代码 描述 原因 措施 输入异常 道,两路信号不一致时 报错。 良,并检查外界电路是 否正常。 0x30508A 缩减模式输入异 常 该信号为双链路冗余通 道,两路信号不一致时 报错。 请检查面板已配置 DI 接口 端子是否接触不 良,并检查外界电路是 否正常。 0x30508B 三位置使能输入 异常 三位置使能输入异常 0x10F0300 登录初始化失 败 登陆连接时存在 数据…
文档版本:3.1 199 / 201 节卡服务手册
错误代码
描述
原因
措施
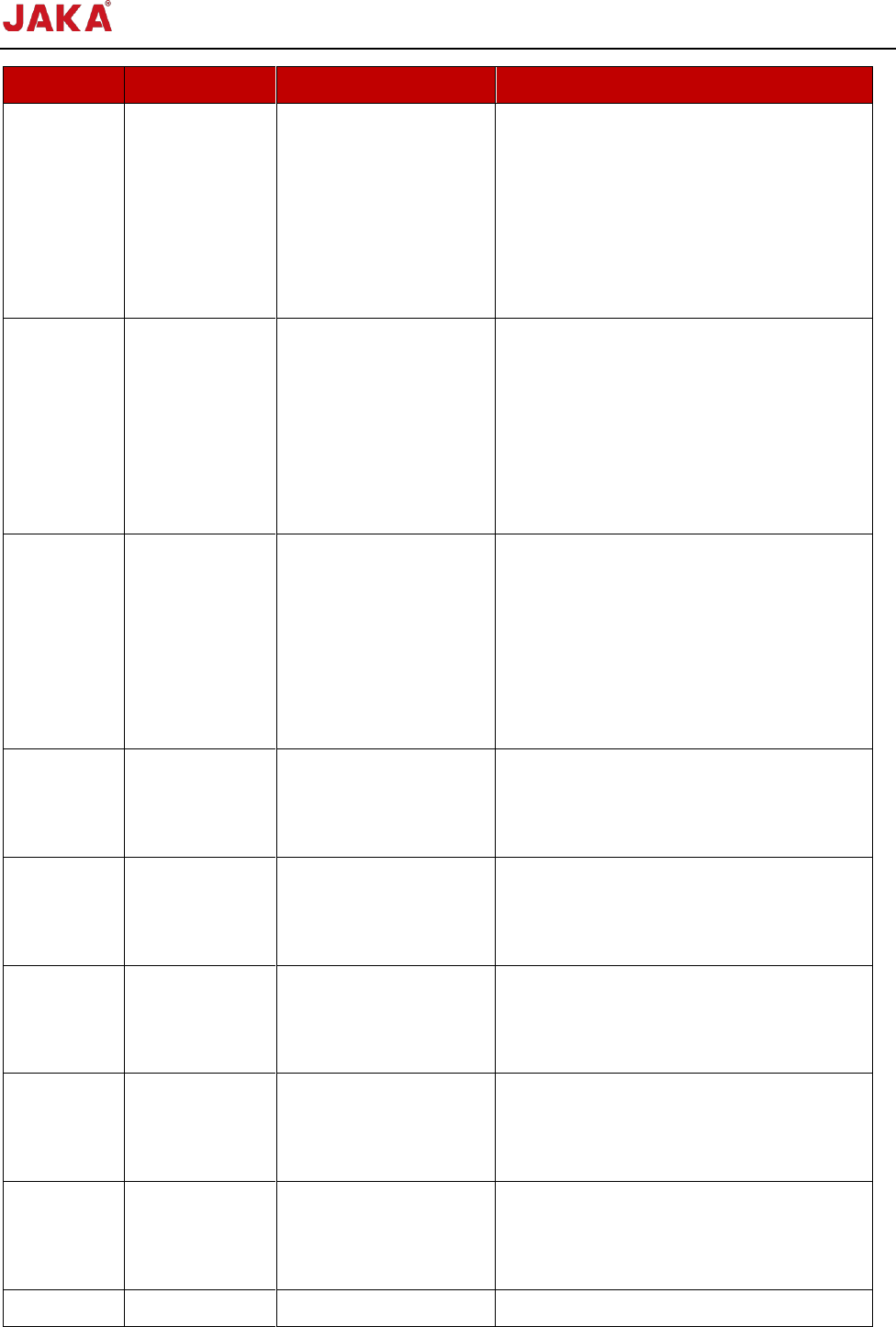
0x308183
本体 CAN 通信
中断
打开机器人电源后一段
时间没有接收到控制器
发送到本体的指令。
1)请将 SCB、PSCB 固件更新到最新版本
后查看是否存在该故障;
2)在 APP 监控或伺服上位机监控页面查看
1~6 关节的数据是否有刷新;
3)请查看本体末端指示灯是否亮,若不亮
请检查接线是否正常。
0x308184
TIO CAN 通信
中断
打开机器人电源后一段
时间没有接收到控制器
发送到本体的指令。
1)请将 SCB、PSCB 固件更新到最新版本
后查看是否存在该故障;
2)在 APP 监控或伺服上位机监控页面查看
1~6 关节的数据是否有刷新;
3)请查看本体末端指示灯是否亮,若不亮
请检查接线是否正常。
0x308185
等待 CAN 通信
正常超时
打开机器人电源后一段
时间没有接收到控制器
发送到本体的指令。
1)请将 SCB、PSCB 固件更新到最新版本
后查看是否存在该故障;
2)在 APP 监控或伺服上位机监控页面查看
1~6 关节的数据是否有刷新;
3)请查看本体末端指示灯是否亮,若不亮
请检查接线是否正常。
0x305081
手柄急停信号不
一致
该信号为双链路冗余通
道,两路信号不一致时
报错。
请尝试更换手柄,或联系节卡技术服务人员
检查柜子 SCB 线路。
0x305082
用户急停信号输
入不一致
该信号为双链路冗余通
道,两路信号不一致时
报错。
请检查面板 p8 端子是否接触不良,并检查
外接电路是否正常。
0x305083
保护性停止信号
输入不一致
该信号为双链路冗余通
道,两路信号不一致时
报错。
请检查面板 p8 端子是否接触不良,并检查
外接电路是否正常。
0x305087
附加急停输入异
常
该信号为双链路冗余通
道,两路信号不一致时
报错。
请检查面板已配置 DI 接口端子是否接触不
良,并检查外界电路是否正常。
0x305088
附加保护性停止
输入异常
该信号为双链路冗余通
道,两路信号不一致时
报错。
请检查面板已配置 DI 接口端子是否接触不
良,并检查外界电路是否正常。
0x305089
保护性停止复位
该信号为双链路冗余通
请检查面板已配置 DI 接口端子是否接触不
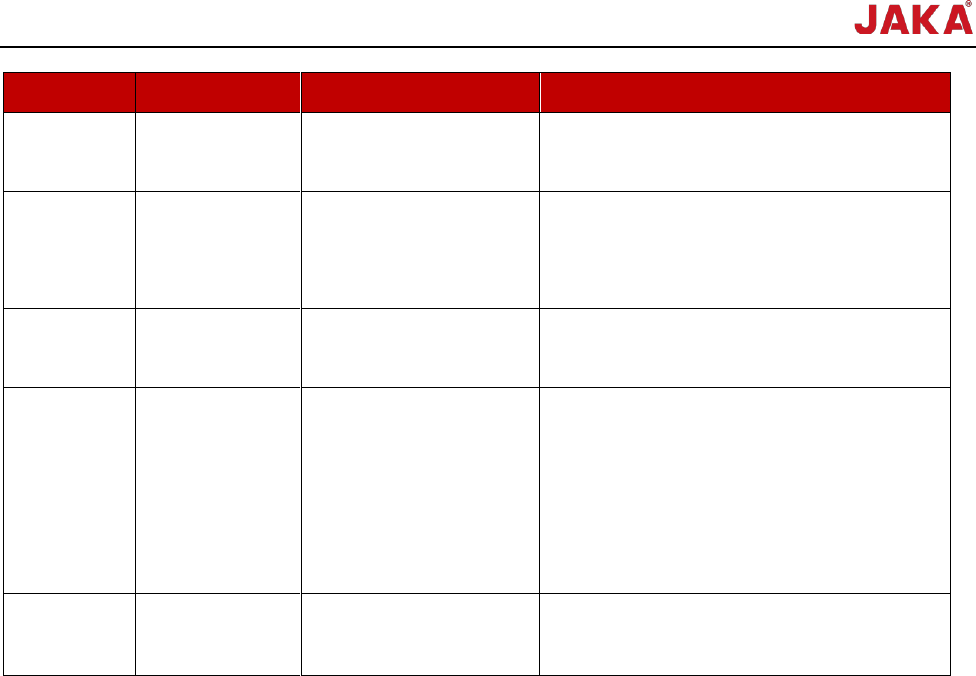
文档版本:3.1 200 / 201 节卡服务手册
错误代码
描述
原因
措施
输入异常
道,两路信号不一致时
报错。
良,并检查外界电路是否正常。
0x30508A
缩减模式输入异
常
该信号为双链路冗余通
道,两路信号不一致时
报错。
请检查面板已配置 DI 接口端子是否接触不
良,并检查外界电路是否正常。
0x30508B
三位置使能输入
异常
三位置使能输入异常
0x10F0300
登录初始化失
败
登陆连接时存在数据读
取异常
1.请检查当前软件 APP版本与控制器版本
是否存在版本不匹配。
2.请检查网络连接是否存在异常。
3.请尝试重新连接机器人或重启 APP 操
作。
0x10F0301
此版本为测试
版本
此版本为测试版本
请联系节卡技术服务人员获取正式版本

节卡机器人股份有限公司
地址:上海市闵行区剑川路 646 号 6 号楼
电话:400-006-2665
网址:www.jaka.com