JMC4011102_YV88X MainteG_J.pdf - 第45页
メモ 25 2 Section JMC4011102 6. Z 軸安全センサーの交換と位置調整 4 「 3/4/A4 真空センサー入力モニター」画面を開 きます。 ヘッド 1 の調整のときは「A 1 」 、ヘッド 2 のときは 「A 2 」にカーソルを合わせ、 [ENTER]キ ー を 押 し て く ださい。 5 ヘッドをコンベアレールの真上に移動させます。 非常停止ボタンを押してから、手でヘッド部を移動 させてください。 6 ノズル…

メモ
24
2
Section
JMC4011102
6. Z軸安全センサーの交換と位置調整
4
センサーをステイから外します。
プラス精密ドライバーでセンサーの取り付けネジを
外してください。
c
注意
センサーとステイの間に入っているプレートをなくさないでくださ
い。
5
新しいセンサーをステイに取り付けます。
センサーとステイの間にプレート入れ、プラス精密
ドライバーでネジ締めしてください。
6
センサーステイを元の位置に取り付けます。
六角レンチ (2.5) で、取り付けボルト 2 本を締めて
ください。
c
注意
取り付けボルトを締め過ぎるとセンサーを壊す場合がありますので注
意してください。また、センサーがZ軸ラックギヤ側に向くようにセ
ンサーステイを取り付けてください。
7
コネクターを接続し、ハーネスを元どおりに結
束します。
■ Z 軸安全センサーの高さ調整
ヘッドが基板面から13 ±1.0mm 上昇した位置で Z軸安全
センサーのON/OFF が切り替わるように、Z軸安全セン
サーの取り付け高さを調整します。
1
マシンを起動します。
2
ノズルを確認します。
Z 軸安全センサーを交換した側のヘッドにタイプ62F
ノズルが装着されていることを確認してください。
装着されていないときは、「3/4/A5 ノズルチェン
ジ」コマンドで交換してください。
3
手動モードで「ZR 軸」とスピードを選択しま
す。
1.「3/4/B1 ジョイスティック軸選択」で「ヘッド1
ZR 軸」または「ヘッド 2 ZR 軸」を選択してくだ
さい。
2.「3/4/B2 運転スピード変更」で20%以下の低速
度を選択します。
Step 4
Z軸安全センサー部品
取り付けスティ
センサー
ヘッドが基板面より13mm上昇した位置で
Z軸安全センサーが切り替わること
Z軸安全センサーの高さ調整
メモ
25
2
Section
JMC4011102
6. Z軸安全センサーの交換と位置調整
4
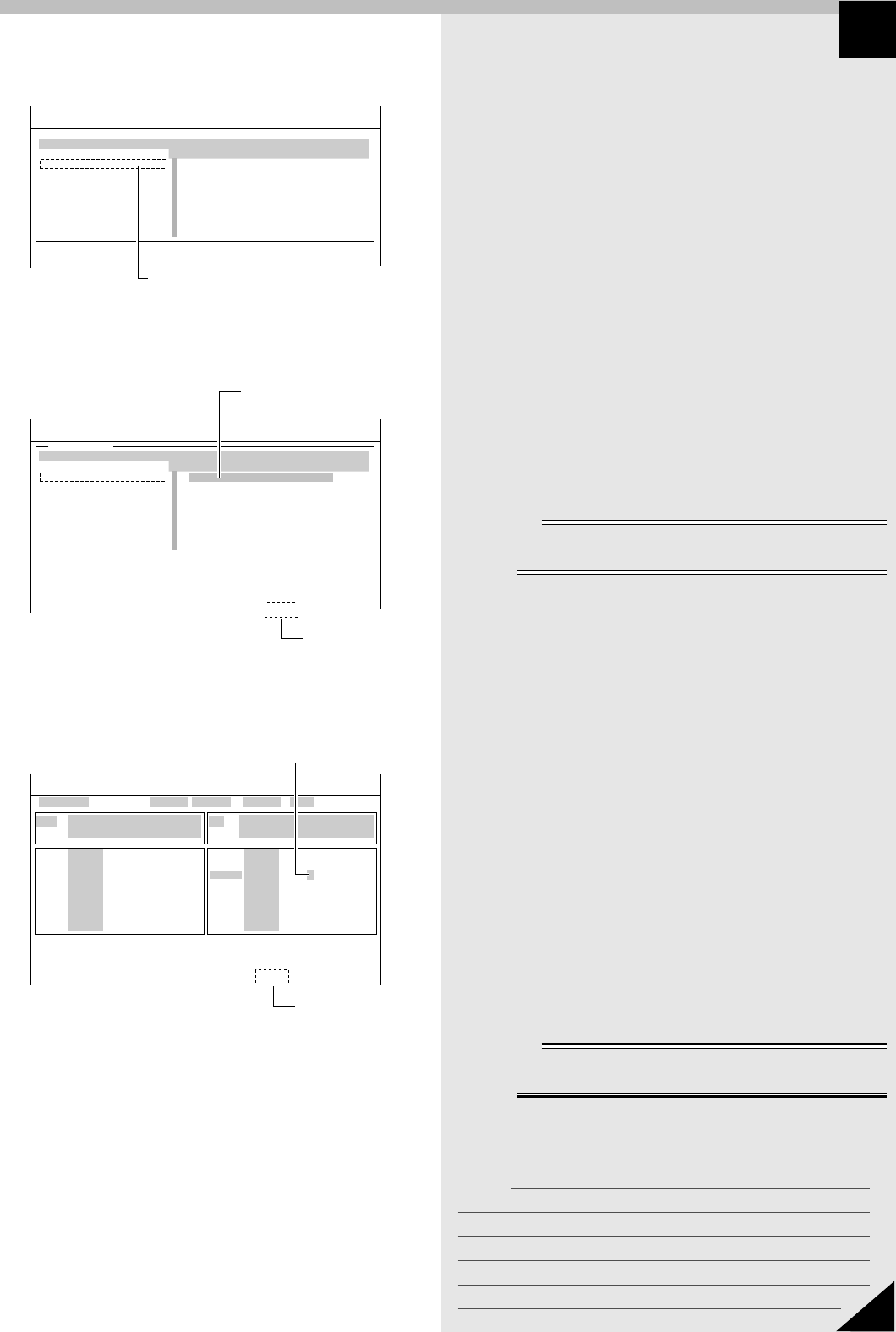
「3/4/A4 真空センサー入力モニター」画面を開
きます。
ヘッド1 の調整のときは「A1」、ヘッド2 のときは
「A2」にカーソルを合わせ、[ENTER]キーを押してく
ださい。
5
ヘッドをコンベアレールの真上に移動させます。
非常停止ボタンを押してから、手でヘッド部を移動
させてください。
6
ノズルを下降させ、コンベアレールに接触した
高さ (Z 座標) をメモします。
1. 非常停止状態を解除します。
2. Step 4 で画面に表示させた「真空センサー入力モ
ニター」を見ながら、ジョイスティッックでヘッ
ドをゆっくりと下降させ、真空レベルのバーグラ
フ全体が茶色に変わったときのZ 座標をメモして
ください。
参考
ノズル先端がコンベアレールに接触すると、真空圧が上がります。
コンベアレールの上面は基板面の高さと基本的に同じです。
7
「3/4/A1 入出力モニター」→「ヘッド」画面を
開き、センサーの状態を確認します。
入力モニター (右画面) の「N2430」 (ヘッドの下降
端) が "0" (検出) を表示していることを確認してく
ださい。
8
センサーのON/OFFが切り替わる高さを確認し
ます。
1. ジョイスティッックでノズルをゆっくりと上昇さ
せ、入力モニターの「N2430」が "0" から "1"
(未検出) に切り替わるときのZ 座標をメモしま
す。
2. 上記の座標値からStep 6 でメモした座標値を引
き、13 ±1.0mm であることを確認します。
基準値よりも大きければ、その分だけZ 軸安全セ
ンサーの取り付け位置を下げてください。逆に小
さければ、その分だけ取り付け位置を上げてくだ
さい。
w
警告
Z軸安全センサーの取り付け位置を調整するときは、必ず非常停止状
態にしてください。
[↑] [↓] : ヘッド選択 [ENTER] : バキュームON/OFF [ESC] : 終了
真空センサーレベル
現在値
0
0
0
0
0
0
0
0
上限値
0
0
0
0
0
0
0
0
下限値
0
0
0
0
0
0
0
0
ヘッド
A1
A2
A3
A4
F_A1
F_A2
C_A1
C_A2
<<モード>> 4/手動
<コマンドリスト> A/IOユーティリティ
[スペース] :画面停止
「A1」または「A2」にカーソルを合わせる
Step 4
[↑] [↓] : ヘッド選択 [ENTER] : バキュームON/OFF [ESC] : 終了
真空センサーレベル
現在値
0
0
0
0
0
0
0
0
上限値
0
0
0
0
0
0
0
0
下限値
0
0
0
0
0
0
0
0
ヘッド
A1
A2
A3
A4
F_A1
F_A2
C_A1
C_A2
<<モード>> 4/手動
<コマンドリスト> A/IOユーティリティ
[スペース] :画面停止
指定アーム 本機 ZR軸
軸移動速度 20
機械原点からの座標 X =xx Y =xx Z =xx R =xx
Z座標をメモする
ノズル先端がコンベアレール
に接触すると真空レベル
バーグラフ全体が茶色に変わる
Step 6
T2C00
T2C67
T2C65
T2C66
T2C97
T2C80
T2C70
T2C27
N2460
N2470
N2430
N2416
N2417
N2434
N2435
N4400
0000000
0000000
1000000
0
0
0
0
0
指定アーム 本機 ZR軸
軸移動速度 20
機械原点からの座標 X =xx Y =xx Z =xx R =xx
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
HEAD
00000000
0
0
0
0
00000000
00000000
0
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 4/手動
入出力モニター 表示形式 選択表示 表示対象 HEAD
OUT ヘッド吸着 1 - 2
OFF 0 / ON 1
I N ヘッドの下降端
未検出 1 / 検出 0
Z座標をメモする
センサーの反応が "0" (検出) から
"1" (未検出) に変わる
Step 8

JMC4011102
Section 3 YV88X-Fカメラ部品の交換
■ 交換部品および調整項目
交換部品
移動カメラ
移動カメラ照明
交換時期
故障時
故障時
部品番号
KV7-M7210(X)
KGA-M7210(Xg)
KV7-M7600
交換後の調整
移動カメラピント
移動カメラスケール
AMF調整
移動カメラ照明レベル
AMF調整