00191027-01.pdf - 第206页
7 Visionsystems Istruzioni per l’uso SIPLACE 80 S/F/G 7.2 Visionsystem C.S. Edizione 07/97 Versione software dalla SR.010.xx 7 - 14 Preparato re e le LE D di vi sualiz zazi one pe r - la CPU - il pr oces sore Visio n - l…
Istruzioni per l’uso SIPLACE 80 S/F/G 7 Visionsystems
Edizione 07/97 Versione software dalla SR.010.xx 7.2 Visionsystem C.S.
Preparatore 7 - 13
7.2 Visionsystem C.S.
Il Visionsystem C.S. rileva la posizione esatta del circuito scheda misurando le fiducial della scheda e deter-
minando lo spostamento in direzione x e y, l'angolo di torsione relativo alla direzione di trasporto del C.S. e la
deformazione di taglio del circuito scheda. Anche le marcature degli scarti (ink dot), verranno comprese dal
Visionsystem C.S. ed analizzate.
7.2.1 Descrizione del sistema
Il Visionsystem C.S. per il riconoscimento della posizione del circuito scheda consiste nel
●
sistema ottico per il riconoscimento della posizione del circuito scheda.
Ogni testa di montaggio a revolver possiede un sistema proprio per il riconoscimento della posizione del
C.S. (vedi Fig. 7.1.2). Nel dispositivo di incollaggio il sistema a telecamera CS si trova sotto al portale.
(vedi Fig. 7.1.8 a pagina 7 - 10).
INDICAZIONE:
Il riconoscimento di posizione del CS viene eseguito solo con il portale 1.
●
e nell'unità di analisi Vision (di visione)
Per ogni portale si trova un'unità di analisi per il riconoscimento della posizione del circuito scheda e del
componente collocata nell'innesto di comando (vedi Fig. 7.1.3, Fig. 7.1.6 e Fig. 7.1.9). La testa colla è
dotata esclusivamente di un sistema per il riconoscimento della posizione del circuito scheda.
Il sistema di riconoscimento della posizione del C.S. è costituito da una telecamera CCD (videocamera SONY
XC77) con sistema ottico di immagine e di illuminazione integrato. Il campo visivo del modulo C.S. è di 5,7
mm x 5,7 mm. All'interno della misurazione dei campi visivi può essere programmato liberamente un campo
di ricerca in lunghezza ed altezza. Il sistema ottico di immagine è un sistema ottico di misurazione speciale
che compensa nel modo più ampio possibile gli errori di misurazione causati dalle convessità del circuito
scheda. L'illuminazione viene accesa solamente durante l'accettazione delle fiducial di scheda.
L'unità di analisi della visione (MVS) è un sistema ad una piastra conforme alla normativa VME. L'hardware è
composto da:
●
scheda madre MVS100 con processore di visione e collegamenti ad interfaccia
Nella parte posteriore della piastra sono collocati gli
-
allacciamenti a spina per il bus VM e
-
la comunicazione ad alta velocità (HS
3
L).
Nella parte anteriore della piastra si trovano gli allacciamenti di connessione per
-
il video
-
fino a 4 entrate della videocamera
-
due interfacce seriali (RS232 o RS422)
Dispositivo automatico Videocamera C.S. Unità di analisi MVS
80S (2 portali) 2 2
80F (1 portale) 1 1
G (1 portale) 1 1

7 Visionsystems Istruzioni per l’uso SIPLACE 80 S/F/G
7.2 Visionsystem C.S. Edizione 07/97 Versione software dalla SR.010.xx
7 - 14 Preparatore
e le LED di visualizzazione per
-
la CPU
-
il processore Vision
-
l'entrata della videocamera
-
la visualizzazione sullo schermo.
Troverete gli interruttori per il "RESET" e l'"ABORT" al di sotto delle LED di visualizzazione
●
l'interfaccia della videocamera MVS500 (piastra huckpack) per fino a quattro videocamere CCD
7.2.2 Dati tecnici
Tipo di videocamera: SONY XC77
Numero di pixel: videocamera 768 (H) x 494 (V)
immagine 640 (H) x 484 (V)
Campo visivo: 5,7 mm x 5,7 mm
Metodo di illuminazione: processo di illuminazione dall'alto (attivato col processo
di misurazione)
Elaborazione dell'immagine: principio di correlazione, sistema dei valori grigi
Tempo ciclico del processore: < 200 msec
Video: monitor RGB (modalità VGA) 640 x 484 pixel del calcolatore
di stazione
Fiducial della scheda: memoria ad archivio per un massimo di 255 definizioni di fid.
7.2.3 Descrizione delle funzioni
Prima del montaggio vengono determinate dal Visionsystem C.S. posizione, angolo di torsione e deforma-
zione di taglio del circuito scheda in base alle posizioni delle fiducial della scheda. Differenze dai valori di rife-
rimento verranno calcolate comprendendole come correzioni nelle posizioni di montaggio dei componenti.
Su un circuito scheda devono essere trasferite almeno 2 fiducial di scheda, in modo che il sistema riesca a
riconoscere le differenze dalla posizione del C.S. e dall'angolo di rotazione del C.S. Applicando 3 fiducial di
scheda otterrete inoltre informazioni riguardo compressioni e deformazioni del circuito scheda e del tracciato
del circuito scheda.
7.2.4 Svolgimento delle funzioni
Prima che una fiducial possa essere utilizzata per il riconoscimento dei C.S., deve innanzitutto essere stata
"insegnata", ossia i parametri strutturali della fiducial devono essere stati salvati nel Visionsystem C.S. per il
modello.
●
La struttura della fiducial si insegna con la videocamera Vision C.S. collocata sulla testa di montaggio ed il
programma Vision.
L'unità di analisi Vision determina i parametri strutturali della fiducial significativi utilizzando i metodi
dell'elaborazione digitale dell'immagine:
●
Il processo di misurazione si svolge in due fasi:
Istruzioni per l’uso SIPLACE 80 S/F/G 7 Visionsystems
Edizione 07/97 Versione software dalla SR.010.xx 7.2 Visionsystem C.S.
Preparatore 7 - 15
-
processo a 2D di ricerca del modello (processo bidimensionale) in un retino iniziale e predetermina-
zione della coordinate della fiducial
-
processo a 1D di ricerca del modello (processo monodimensionale) per la determinazione precisa
della posizione delle fiducial della scheda.
Nel processo di ricerca del modello a 2 dimensioni la finestra per il riconoscimento del modello viene divisa in
zone di moxel. I moxel (
pi
xel a
mo
saico) sono campi di pixel con, ad esempio, pixel 16 x 16, 8 x 8 ecc....
Quanto più basso è il numero dei pixel, tanto più alta è la risoluzione e quanto più bassa è la velocità di
ricerca.
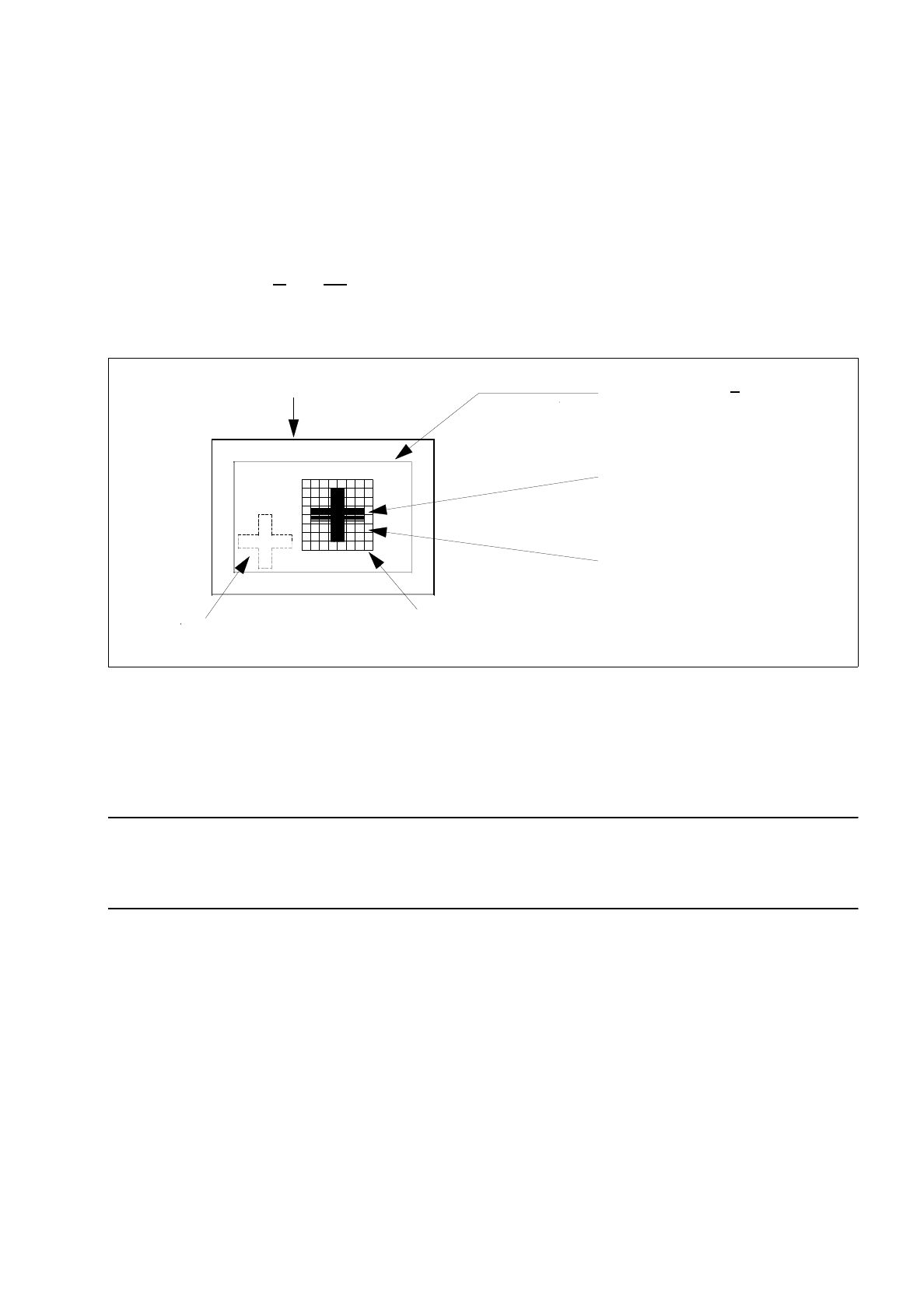
Fig. 7.2.1 Spiegazione del campo visivo della videocamera, del campo di ricerca e della finestra di ricerca del modello
La finestra per la ricerca del modello viene portata sul campo visivo in passi di moxel. I valori grigi di ogni
moxel della fiducial di scheda di riferimento verranno così calcolati. Questa struttura di dati ridotta contiene
informazioni sufficienti sulla struttura di base e sulla posizione della fiducial di scheda di riferimento.
INDICAZIONE
Per poter raggiungere una velocità di ricerca alta, dovrete scegliere una finestra di ricerca più piccola possi-
bile, la quale dovrà tuttavia essere abbastanza grande per reidentificare chiaramente la fiducial.
Per la determinazione precisa del modello e della posizione della fiducial di scheda, viene impiegato il pro-
cesso di ricerca del modello ad 1 dimensione. La configurazione della fiducial viene scomposta in righe e
colonne e vengono sommati l'uno all'altro i valori grigi all'interno di ogni riga e di ogni colonna. La prossima
figura chiarisce questo processo grazie ad una croce doppia.
Campo di ricerca <
Campo visivo della videocamera
(in questa zona si cerca
la fiducial)
Fiducial di scheda di riferimento
Moxel = campo dei pixel
Finestra per la ricerca del modello
(contiene le fiducial di scheda di riferimento)
Campo visivo della videocamera
La fiducial da cercare
ad esempio pixel 16 x 16