HS50_advance_level 2.pdf - 第163页
Stud ent Gu ide HS-5 0 Adva nced II 07/2 002 Ed ition 7 X- Axis 5 ; $ [ L V 2YHUY LHZ The placem ent syst em is equi pped wi th four gan tries. Thes e enab le the fo ur coll ect&place h eads to be posi tione d…

1 - 4
07/2002 Edition Student Guide HS-50 Advanced II
Contents
4
7.5.6.1 Tools and equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.5.6.2 Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.5.6.3 Removing the X-axis scale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.5.6.4 Installing the X-axis scale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.5.6.5 Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
0HFKDQLFDOVHWWLQJV
7.6.1 Belt Tension of X-Axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.6.1.1 Measuring Data and Aiding Tools. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.6.1.2 Measuring Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.6.2 Proximity Switch X- Axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7.6.3 Jumper Settings on the standard Head Board HS-50 . . . . . . . . . . . . . . . . . . . . . . . . 38
7.6.4 Jumper Settings, Processor Board S50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.6.5 Overview modular head board (Option for HS50) . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
7.6.5.1 New Jumper Setting on the modular head board . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.6.5.2 Status 7 Segment display compared to the LED Display. . . . . . . . . . . . . . . . . . . . 42
2YHUYLHZRI;D[LVFRQWUROV\VWHP
7.7.1 Basic Components of the X-axis drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.7.2 Track signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
&KHFNLQJWKHWUDFNVLJQDO
7.8.1 Test Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7.8.2 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7.8.3 Analog Track Signals, Gantry Axes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.8.3.1 Measurement Setup of Analog Track Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.8.3.2 Oscilloscope Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.8.3.3 Procedure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.8.4 Analoge Zero Pulse of the Gantry Axes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.8.4.1 Measuring Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.8.5 Digital Track Signals of Gantry Axes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
$[LVG\QDPLFV
7.9.1 Equipment and Test Devices. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.9.2 Servo Boards, Gantry Axes HS-50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.9.3 Overview of Axes Control Cards HS-50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.9.4 Measurement Setup for Axis Adjustments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.9.5 Control of the X-Axis Dynamics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.9.5.1 General Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.9.5.2 Control P-Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Student Guide HS-50 Advanced II 07/2002 Edition
7 X-Axis
5
;$[LV
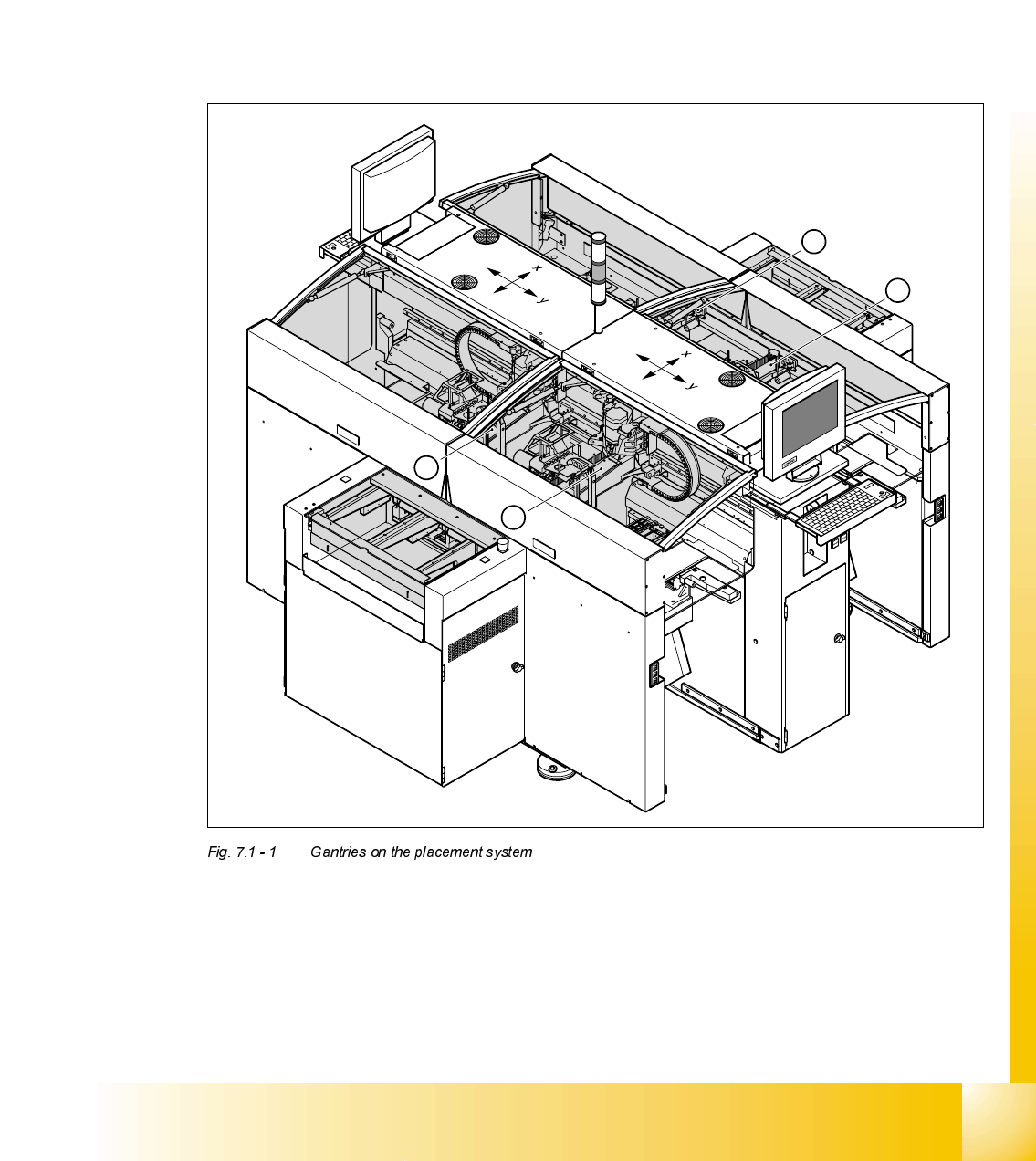
2YHUYLHZ
The placement system is equipped with four gantries. These enable the four collect&place heads
to be positioned in the x and y directions with great accuracy and independently of one another.
(1) Gantry 1 (2) Gantry 2
(3) Gantry 3 (4) Gantry 4
1
4
2
3
07/2002 Edition Student Guide HS-50 Advanced II
7 X-Axis
6
The structure of the gantries makes them very torsionally rigid. Precise mechanical movements
of the axes are produced by axis recirculating ball screw units.
High-precision positioning systems determine the positions of the x and y axes. To do this, the
graduations on metal scales are optoelectronically scanned and the track signals are sent to the
axis control in the control unit.
Direct drive units are used to position the placement heads in the x and y directions. This elimi-
nates friction losses, for example, which are typical when complex gearing is used. In addition,
there is none of the wear that can significantly affect the accuracy of positioning systems over the
course of time.
;D[LVGULYH
A toothed belt is used to convert the rotary movement of the turning motor for the X-axis directly
into a translatory movement of the placement head in the x direction.
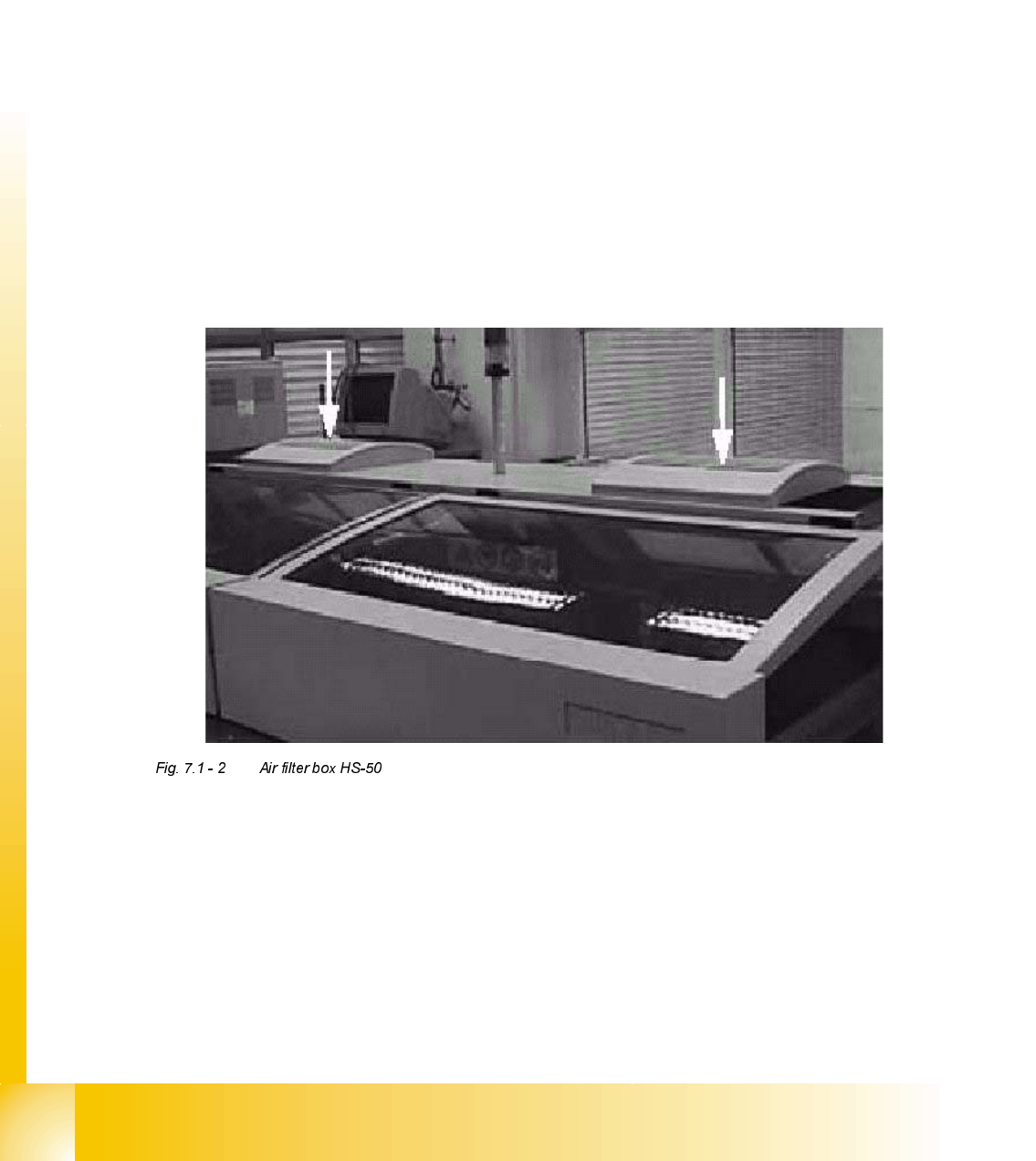
2SWLRQ$LUILOWHUER[IRU;0RWRUV
The air filter box for the X-motors, consisting of one filter and two highperformance fans, is
mounted directly above the cooling air inlet of the linear motor.
– Sleeve contamination is reduce by 20%
– Contamination of valve tappets is reduce by 40%
– The frequency of maintenance require is reduce by 30%