HS50_advance_level 2.pdf - 第319页
Stud ent Gu ide HS-5 0 Adva nced II 07/2 002 Ed ition 10 Star Axis 15 2YHUYLHZRI$ [ HV&R QWURO &DU GV+6 type of a xis and ga ntry number adress of axis '3 '3 '3 '3 CE …
07/2002 Edition Student Guide HS-50 Advanced II
10 Star Axis
14
.(<WRILJ
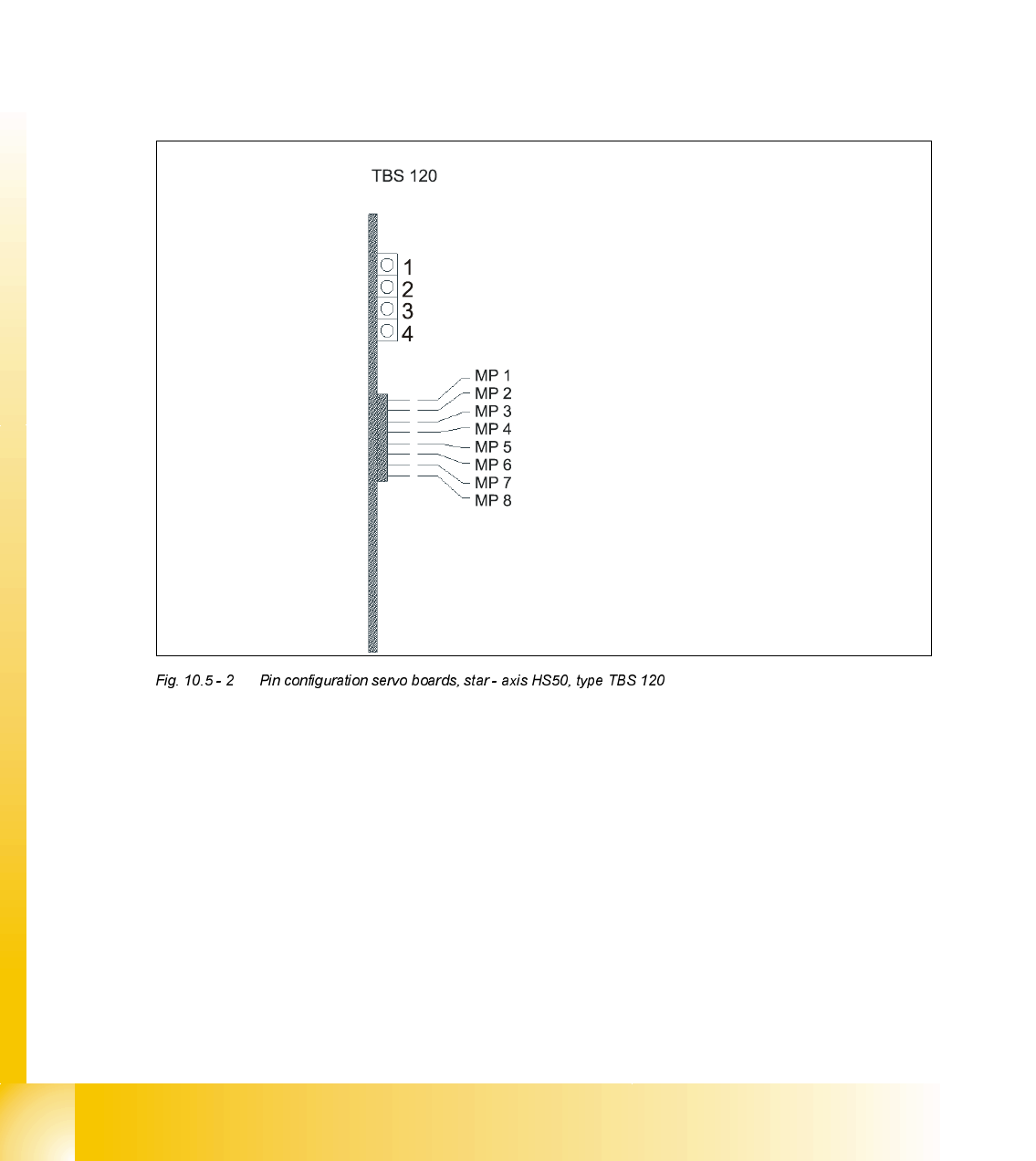
TDS 120 A2.5Z = Servo board z-axis
TDS 120 / 1D = Servo board dp - axis
TDS 120 = Pin configuration
LED: Ready for operation
LED: Enable output stage
LED: Effective current limit
LED: Error
Potentiometer: Tacho
Potentiometer: P-Amplification
.(<
(1) LED: Ready for operation
(2) LED: Enable output stage
(3) LED: I
RMS
limit
(4) LED: Error
MP1 = Nominal current "I-S (U)"
MP2 = Nominal current "I-S (W)"
MP3 = Actual current "I-ist (U)"
MP4 = Actual current "I-ist (W)"
Ns Speed setpoint value
Ie Setpoint value, power input
Ta Tacho (real tacho voltage)
Is Nominal current (speed controller output)
IA Motor manipulated variable
(speed controller output)
li Actual current
Ss Sensor stop signal
0V Amplifier electronic GND
MP5 = "U-nominal (U)"
MP6 = "U-nominal (W)"
MP7 = Free
MP8 = Reference potential "0V"
Student Guide HS-50 Advanced II 07/2002 Edition
10 Star Axis
15
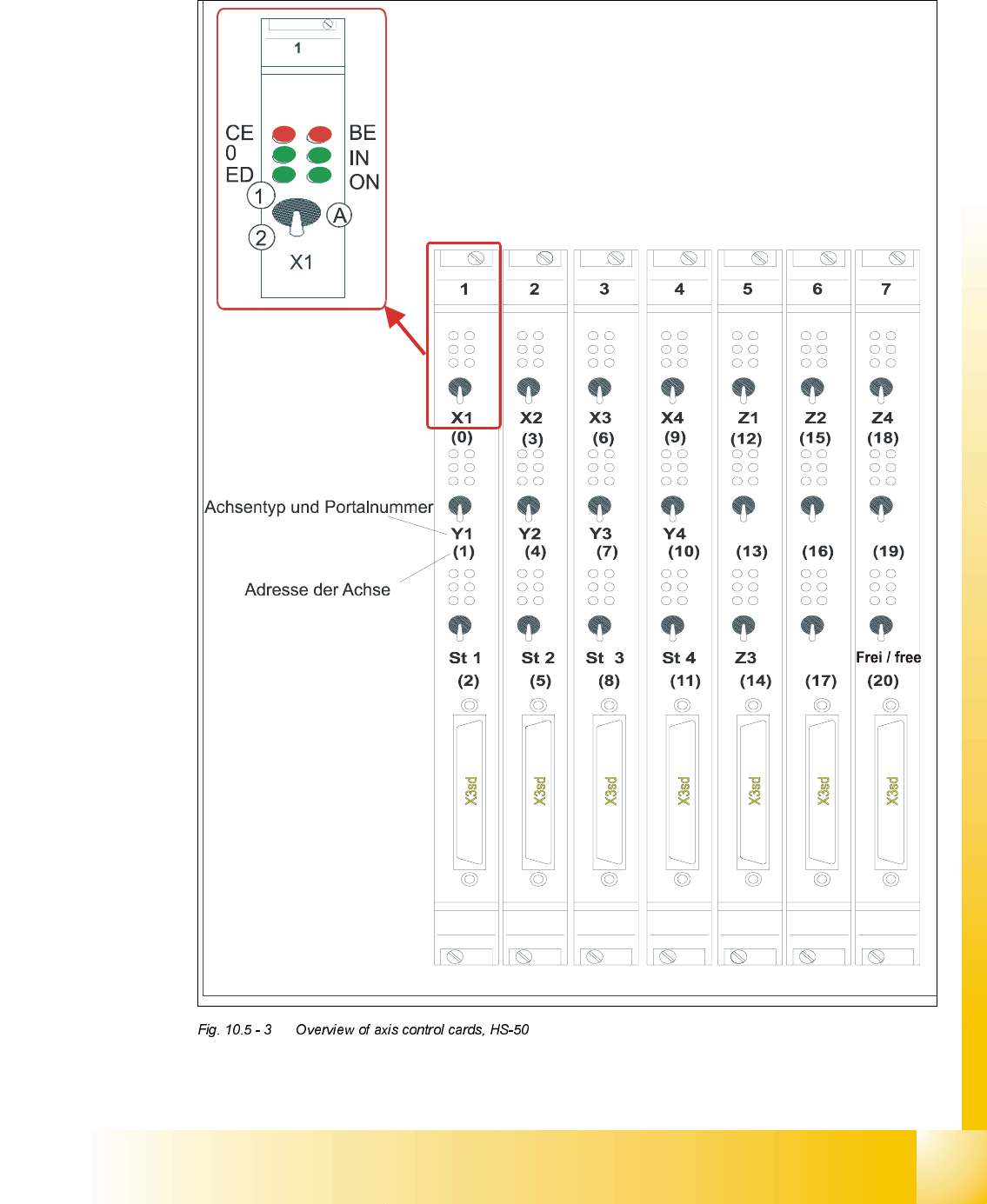
2YHUYLHZRI$[HV&RQWURO&DUGV+6
type of axis and gantry number
adress of axis
'3 '3
'3
'3
CE = Counting error
0 = Zero pulse
ED = End signal
BE = General error, module error
IN = Initialized
ON = Servo ON
(A) Axis enable switch
(1) Servo ON
(2) Servo OFF
07/2002 Edition Student Guide HS-50 Advanced II
10 Star Axis
16
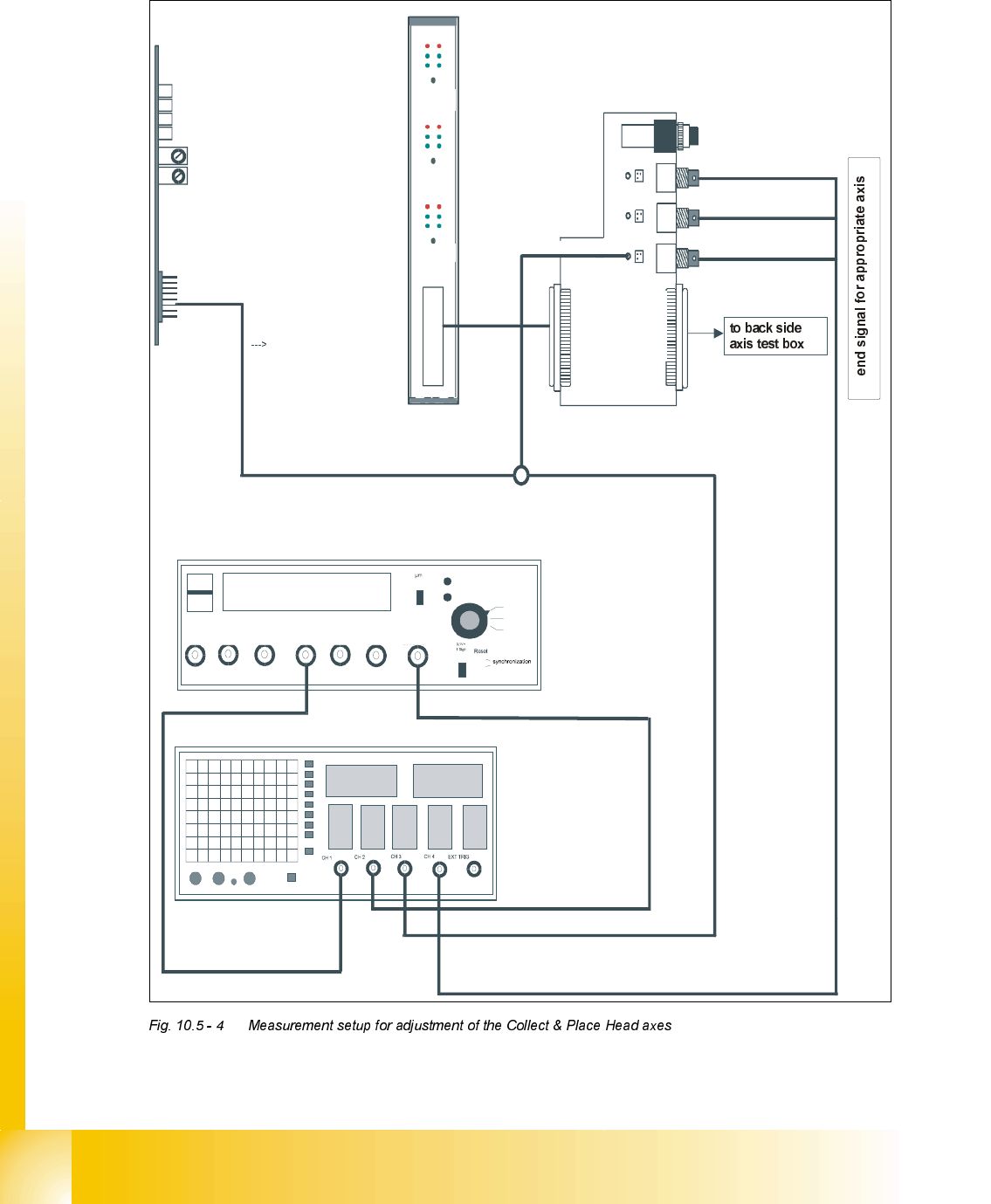
0HDVXUHPHQW6HWXSIRU$[LV$GMXVWPHQWV
ready for operation
enable output stage
effective current limit
error
tacho
P-gain
axis 0
axis 1
axis 2
measuring current of star - axis
changeover switch pressed down
end signal axis 0
end signal axis 1
end signal axis 2
interface
test adapter
axis test box
actual current
with RC - filter
current measuring of dp - axis and z-axis only
interface axis control card
interface axis tes
t box
track A track B zero pulse Vnom force end signal deviat. of pos.
dgt
zero pulse
end signal
axis 0
axis 1
axis 2
OFF
ON
Vnominal
d
e
v
i
a
t
i
o
n
o
f
p
o
s
i
t
i
o
n
c
u
r
r
e
n
t
v
a
l
u
e
e
n
d
s
i
g
n
a
l