Feeder校正仪说明书JO-074-004_w.pdf - 第62页
3 - 15 (2) 各系统数据概要 控制模式 切换控制时使用。 用 0 至 1 的数值设定。 0 : Through Mode( 连续模式 ) ( 检查精度时省略操作员确认。) 1 : Step Mode( 单步模式 ) ( 显示操作员确认。) Communication Timeout Value( 通信超时时间 ) 设定 RS232C 序列通信中的通信不能检出超时时间。 单位 : 秒 Alarm Buzzer Mode( 警报警音…
3-14
5. “System Setting( 系统设定 )”界面
在“System Setting”界面,关于机械原始设定值进行定义。
(1) “System Setting”界面的显示方法
“System Setting”界面的显示、变更需要管理员权限。
请将权限级别切换到管理员权限级别。
Reference
关于步骤请参照 “第三节 1. 管理员权限变更”。
显示“Type Listup( 类型设定列表 )”界面的次级游标,按
[Setting( 设定 )] 按钮。
Note
次级游标不分是否在类型数据的登录完成界面还是未登录界面。
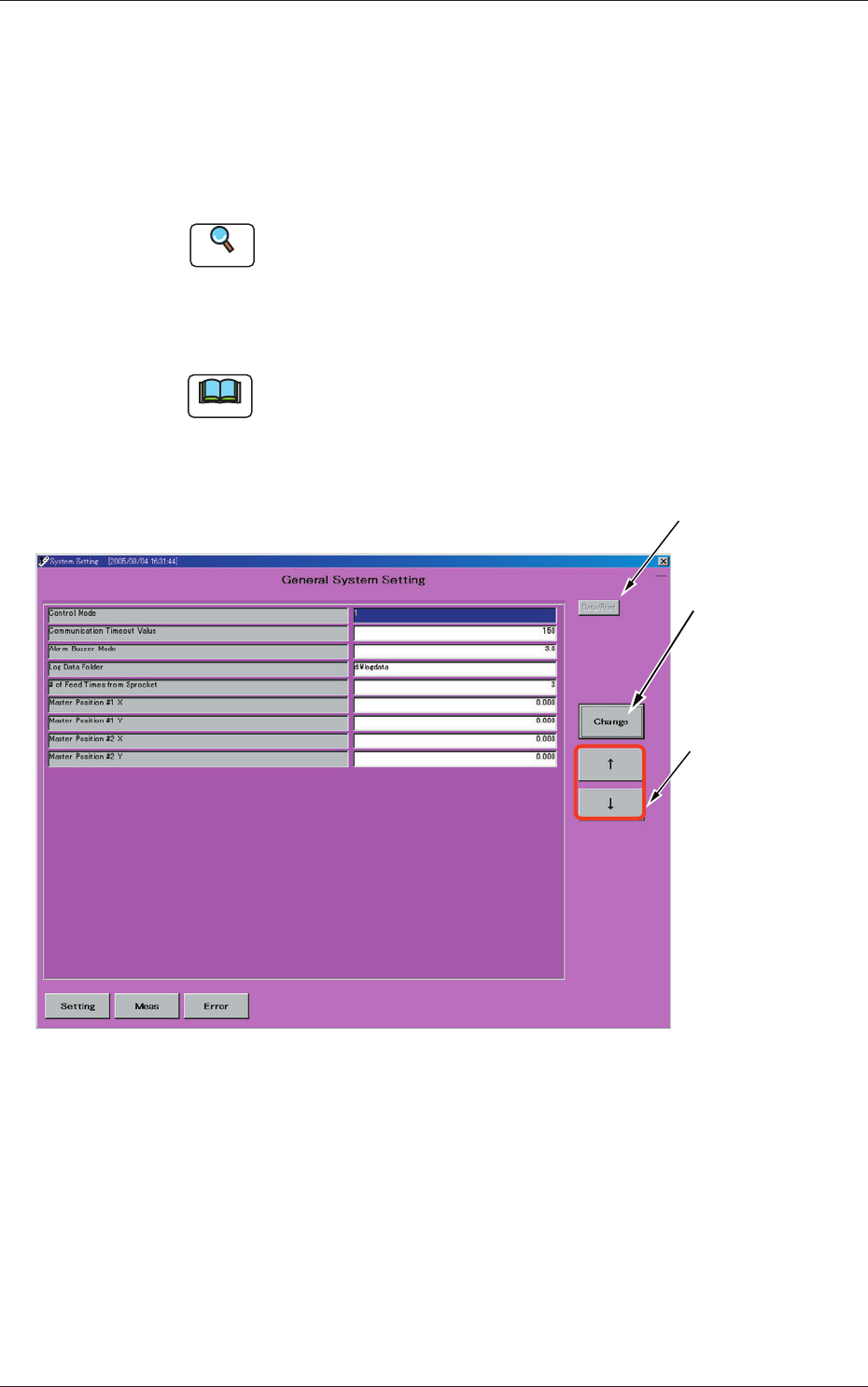
Fig.C14 “System Setting”界面
5. “System Setting( 系统设定 )”界面
0511-001
打印系统数据。
显示设定值相应的
输入界面,可以变
更设定值。
移动光标时使用。

3-15
(2) 各系统数据概要
控制模式
切换控制时使用。
用 0 至 1 的数值设定。
0 : Through Mode( 连续模式 )
( 检查精度时省略操作员确认。)
1 : Step Mode( 单步模式 )
( 显示操作员确认。)
Communication Timeout Value( 通信超时时间 )
设定 RS232C 序列通信中的通信不能检出超时时间。
单位 : 秒
Alarm Buzzer Mode( 警报警音模式 )
设定异常时的警音时间。
0 时,连续鸣叫,直到按警音按钮停止。
可以设定 0 以及从 0.1 开始到 600.0 秒 (10 分 )。
Log Data Folder( 日志数据保存文件夹 )
指定检查数据的记录文件的保存文件夹。
请用最多 62 个字符 ( 半角字符 ) 登录。
# of Feed Times from Sprocket( 链轮齿空传送次数 )
是开始检查时标准料带空传送次数的指定。
可用 0 至 10 的数值设定。
Master Position( 标准登录位置 ) #1 XY/
Master Position #2 XY
是标准送料器检查位置。
5. “System Setting( 系统设定 )”界面
0511-001
3-16
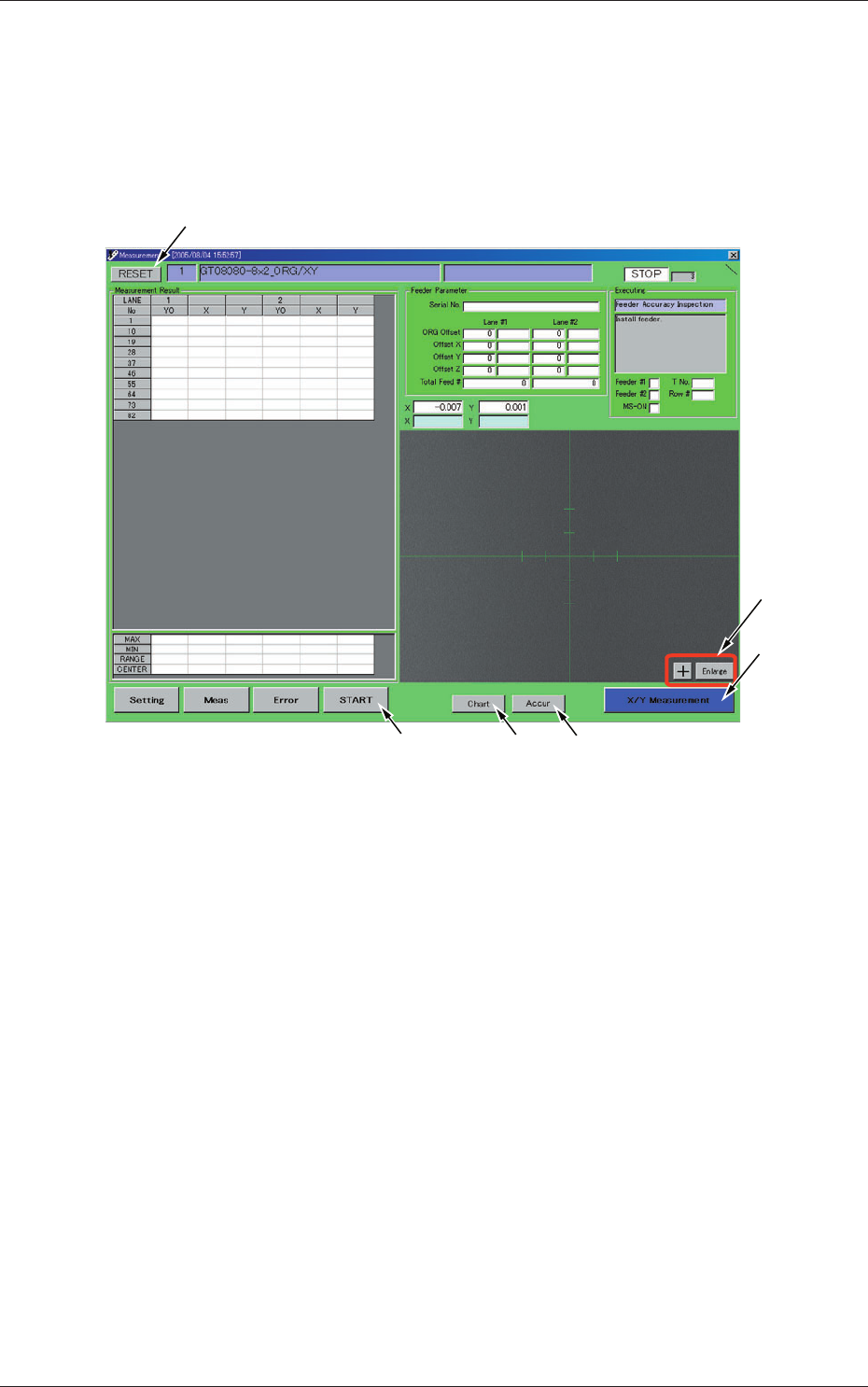
6. “Measurement( 测量 )”界面
实行送料器的精度检查、显示检查结果、制作精度表。
按界面切换指令按钮的 [Meas( 测量 )] 按钮,显示“Measurement”界面。
各按钮的说明
Fig. C15 “Measurement”界面
[1]
开始测量。
实行测量中,显示变为 [STOP],中断测量 ( 暂停 )。
[2]
中止测量。
用 [1] 的 [STOP] 进行中断时显示。
[3]
显示精度表制作界面。
[4]
显示测量数据的图表。
[5]
进行摄像机图像界面的显示、不显示控制。
[6]
将当前的 XY 位置作为各测量结果。
6. “Measurement( 测量 )”界面
0511-001
[2]
[5]
[6]
[3]
[4][1]