第1章 MMI错误码和问题解决.pdf - 第7页
在指定的轴上,感应到 – 方向的 H/W Limit 传感器。 [ ] 按 ”ST OP” 按钮关闭蜂鸣器。 用手动方法把各轴移动到不被 H/W Limit 传感器感应的位置 。 按 ”RESET” 按钮把设备转换成 ”IDLE” 方式。 按 ”READY” 按钮给设备的电动机供给电源。 重新设定 MMI 的 Sys. Setup 指 定的轴的 S/W Lim it 。 详细事项请…
1-6
$0800 $A [EMER ]
[ ]
移动轴时,另外的轴不在安全位置。
[ ]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
按”READY”按钮给设备的电动机供给电源。
执行初始化后,再执行所要的动作。
$0801 AXIS_SAFE_POS_MOVE_ERROR. [FREEZE ]
[ ]
把指定的轴将要移动到安全位置时发生错误。
[ ]
同错代码”$0800”的措施方法。
$0802 $A [EMER ]
[ ]
移动轴轴时,另外的轴不在安全位置。
[ ]
同错代码”$0800”的措施方法。
$0803 %d %d [FREEZE ]
[ ]
移动轴时,另外的轴不是 Home 状态或不在安全位置。
[ ]
同错代码”$0800”的措施方法。
$0804 %d %d %d [EMER ]
[ ]
移动轴时,另外的轴不是 Home 状态或不在安全位置。
[ ]
同错代码”$0800”的措施方法。
1.2.3. Axis 有关错误 [$1000~$1fff]
$1000 $A -H/W Limit [EMER ]
[ ]
在指定的轴上,感应到–方向的 H/W Limit 传感器。
在指定的轴上,感应到–方向的 H/W Limit 传感器。
[ ]
按”STOP”按钮关闭蜂鸣器。
用手动方法把各轴移动到不被H/W Limit传感器感应的位置。
按”RESET”按钮把设备转换成”IDLE”方式。
按”READY”按钮给设备的电动机供给电源。
重新设定MMI的Sys. Setup指定的轴的S/W Limit。
详细事项请参照“Administrator’s Guide”的 “14.3.1 Gantry TAB ”
$1001 $A + H/W Limit [EMER ]
[ ]
在指定的轴上,感应到+方向的 H/W Limit 传感器。
[ ]
同错误代码 ”$1000”的措施方法。
$1002 $A ALARM [EMER ]
[ ]
Z轴的情况下,过分按下时可能会发生。
在指定的轴上,马达发生错误。
[ ]
按”STOP”按钮关闭蜂鸣器。
确定 Z 轴高度检查高度是否适当,如果错误设置 Z 轴高度请准确修改。
如果发生问题,请与本公司指定的 C/S 公司或当地代理店(Local Agent)联系。
$1003 $A [EMER ]
[ ]
指定的轴移动后,在规定的时间内不停止。
[ ]
请确认相应轴的Actuator及传感器的动作状态。(Motor, Z/R Sensor, Z轴 Offse
t 等)
如果发生问题,请与本公司指定的 C/S 公司或当地代理店(Local Agent)联系。
$1004 $A [EMER ]
[ ]
在指定的轴发生错误。
[ ]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
1-7
1-8
确认与指定的轴电动机有关的配线。请参照“Technical Reference” 的 Board Co
nnection有关Servo Interface 。
正常关闭设备电源过5秒后,请开启电源重新启动。
1.2.4. IO (Solenoid 动作后传感器输入) 有关错误 [$2000~$2fff]
$2000 Encoder [EMER ]
[ ]
确认传送带有关的编码器发生错误。
[措施 方法]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
确认有关传送带的宽度调整的接线状态。 “Technical Reference” 请参照Technic
al Reference”的宽度调节电动机有关Servo Interface
$2001 BUT [FREEZE ]
[ ]
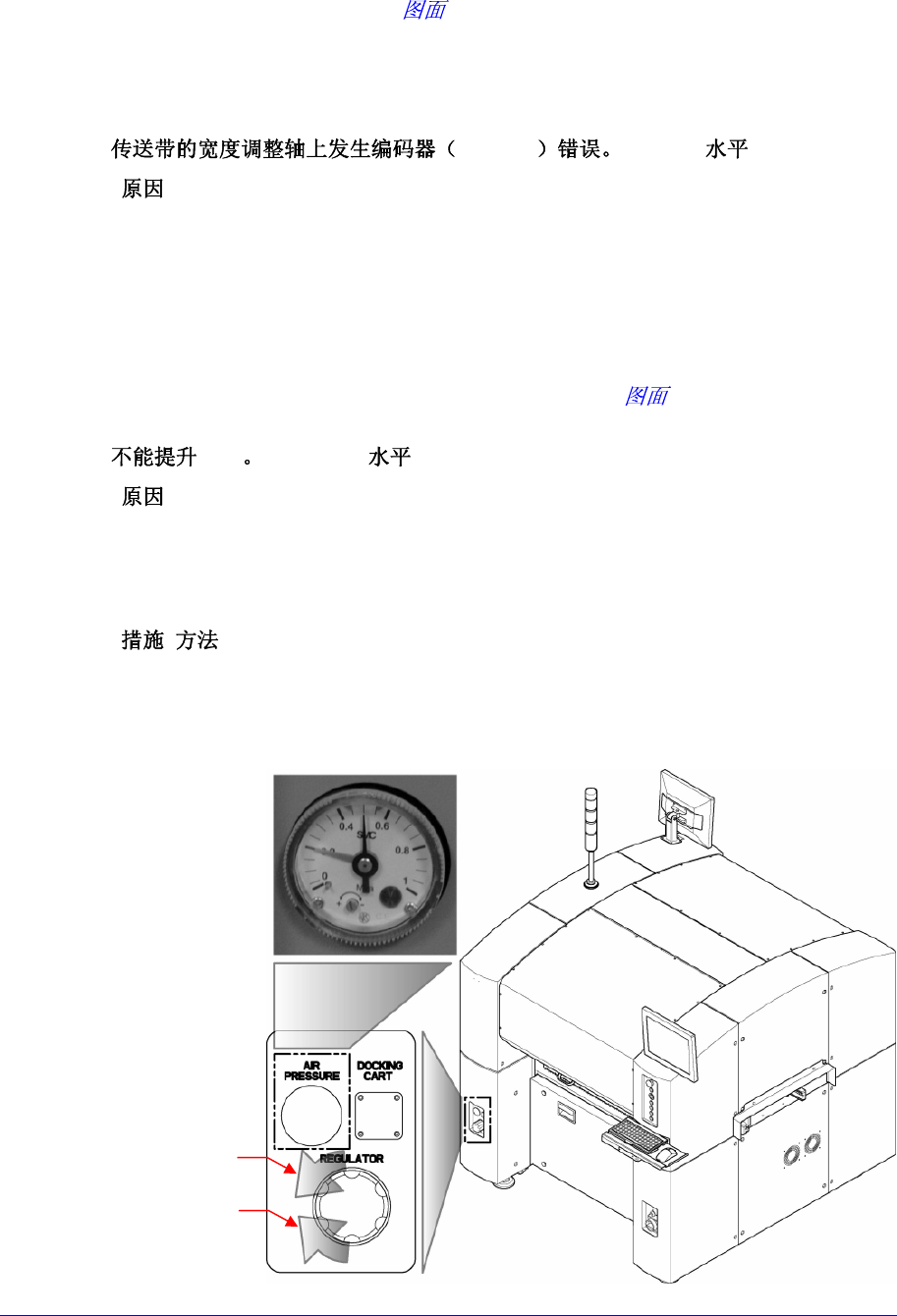
提升 BUT (Back Up Table)时,BUT 不能动时。
把 BUT (Back Up Table)提升后,不被上升(Up)传感器感应。
把 BUT (Back Up Table)提升后,被下降(Down)传感器感应。
[ ]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
从背面的气压表(AIR PRESSURE) 确认压缩气的供应是否正常 (3.5-5bar)。
压力降低
压力上升