第1章 MMI错误码和问题解决.pdf - 第9页
1-9 用手动移动 BUT 的方法来确认有 没有机械的干涉。 为确认 Conveyor Control Board 是否正常,请参照 “Maintenance Reference” 的 “ 7.3 ” 部分,确认相应板的位置后把盖 去除。 另外,在 “Maintenance Re ference” 的 “ 7.3.5 Conveyor Contr ol Board ” 参照 LED 有 关信息确认板是否正常动作。 在 D…
1-8
确认与指定的轴电动机有关的配线。请参照“Technical Reference” 的 Board Co
nnection有关Servo Interface 。
正常关闭设备电源过5秒后,请开启电源重新启动。
1.2.4. IO (Solenoid 动作后传感器输入) 有关错误 [$2000~$2fff]
$2000 Encoder [EMER ]
[ ]
确认传送带有关的编码器发生错误。
[措施 方法]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
确认有关传送带的宽度调整的接线状态。 “Technical Reference” 请参照Technic
al Reference”的宽度调节电动机有关Servo Interface
$2001 BUT [FREEZE ]
[ ]
提升 BUT (Back Up Table)时,BUT 不能动时。
把 BUT (Back Up Table)提升后,不被上升(Up)传感器感应。
把 BUT (Back Up Table)提升后,被下降(Down)传感器感应。
[ ]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
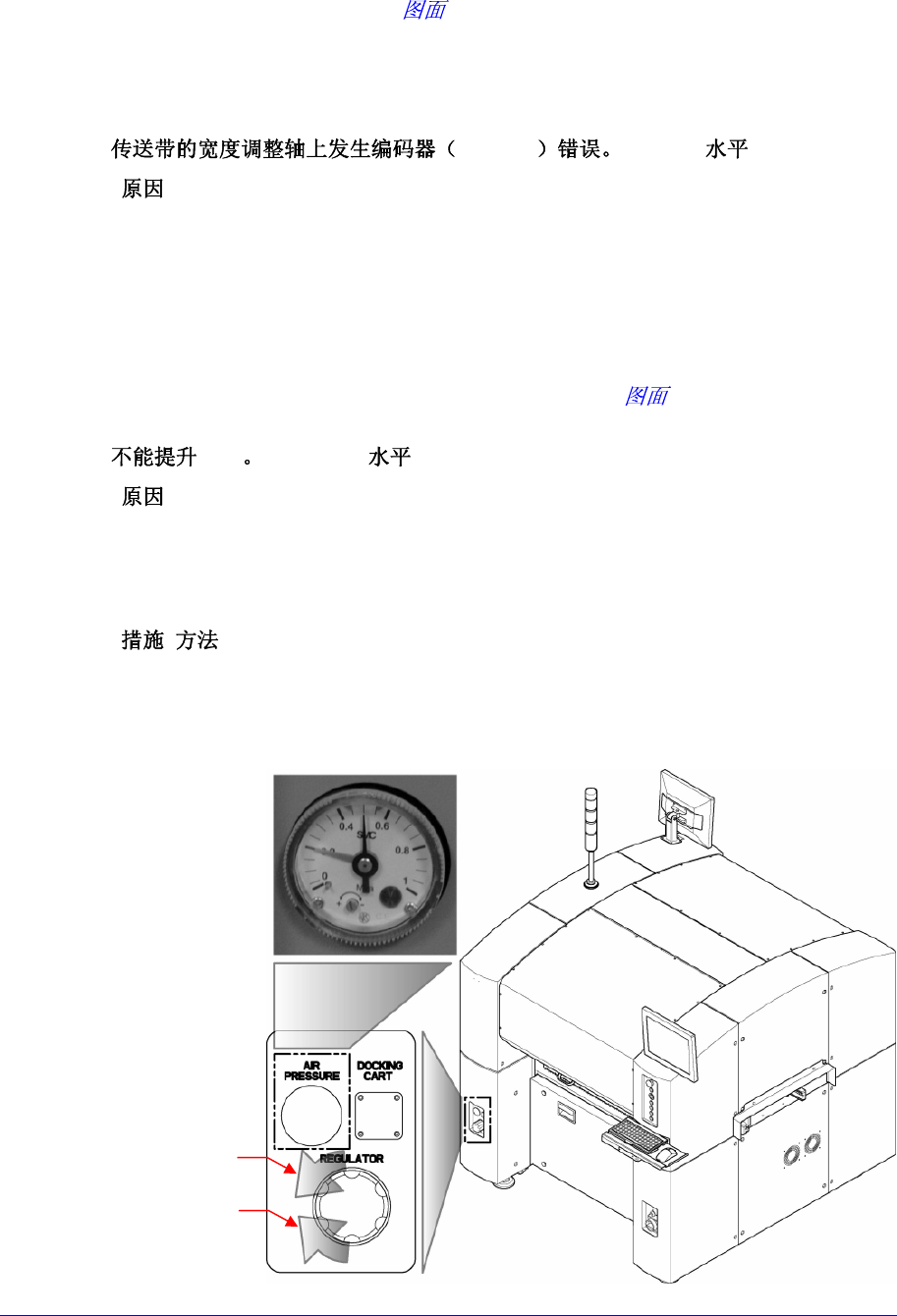
从背面的气压表(AIR PRESSURE) 确认压缩气的供应是否正常 (3.5-5bar)。
压力降低
压力上升
1-9
用手动移动BUT的方法来确认有没有机械的干涉。
为确认Conveyor Control Board是否正常,请参照“Maintenance Reference”的 “7.3
”部分,确认相应板的位置后把盖去除。
另外,在“Maintenance Reference”的 “7.3.5 Conveyor Control Board”参照LED有
关信息确认板是否正常动作。
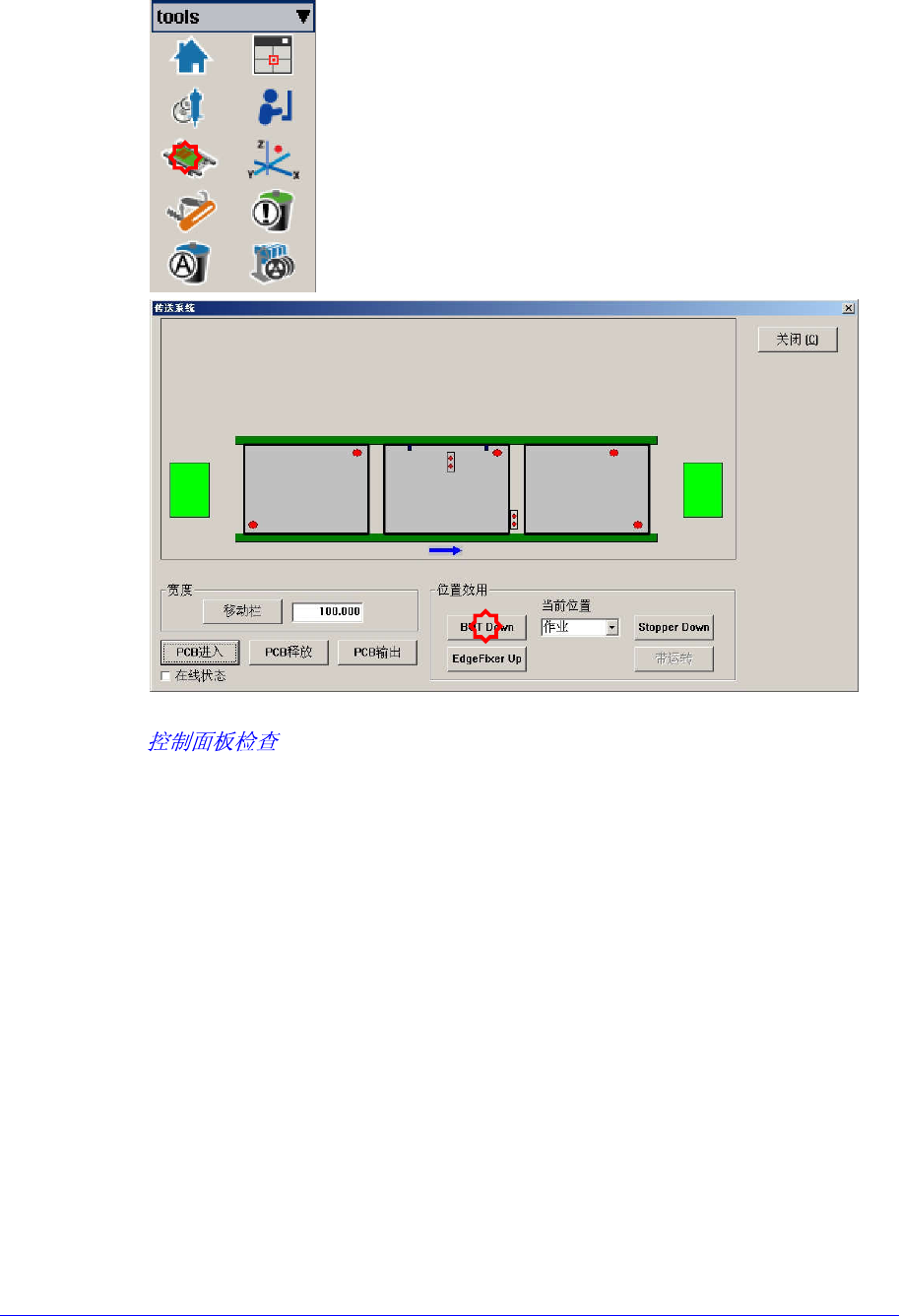
在Diagnosis菜单的I/O确认BUT UP传感器的动作状态。
确认BUT UP传感器的位置。
在Diagnosis菜单的I/O确认BUT DOWN传感器的动作状态。
确认BUT DOWN传感器的位置。
确认BUT传感器位置时 , 请务必与本公司指定的C/S公司或当地代理店(Local
Agent)咨询。
$2002 不能下降BUT。[FREEZE 水平]
[原因]
[措施 方法]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
从背面的气压表(AIR PRESSURE) 确认压缩气的供应是否正常 (0.45-0.55Mpa)

1-12
(4.6 ~ 5.6 kgf/cm
2
))。(请参照$ 2001)
用手动一动BUT的方法来确认有没有机械的干涉。(请参照$ 2001)
为确认Conveyor I/O Board是否正常,请参照“Maintenance Reference”的 “7.3 控
制面板检查”部分,确认相应板的位置后把盖去除。
另外,在“Maintenance Reference”的 “7.3.5 Conveyor Control Board”参照LED有
关信息确认板是否正常动作。
在Diagnosis菜单的I/O确认BUT DOWN 传感器的动作状态。
确认BUT DOWN传感器的位置。
在Diagnosis菜单的I/O确认BUT UP传感器的动作状态。
确认BUT UP传感器的位置。
确认BUT传感器位置时 , 请务必与本公司指定的C/S公司或当地代理店(Local
Agent)咨询。
$2301 Edge Fix [FREEZE ]
$2302 Edge Fix [FREEZE ]
[ ]
前进Edge Fix时,Edge Fix不能动时。($2301)
后退Edge Fix时,Edge Fix不能动时。($2302)
[ ]
按”STOP”按钮关闭蜂鸣器。
按”RESET”按钮把设备转换成”IDLE”方式。
从背面的气压表(AIR PRESSURE) 确认压缩气的供应是否正常 (0.45-0.55Mpa)
。(请参照$ 2001)
用手动一动Edge Fix的方法来确认有没有机械的干涉。