KE-3020_SPE_JP.pdf - 第53页
49 8. インターフェース 8- 1. 電気的イ ンターフ ェース 8-1- 1. 電気信号の種類と意味 マウンタと相手 側機械に関わる電気信号 の接続概念図を下図 の 「電気信 号の接続概 念図」に示します。 下図の 中で、マウ ンタと 上流装置との 間 ①② 、及び下流装 置との間 ③④ の電気 信号を以下 に示します 。 a) 電気信号 ① は搬出要求入力信号( または、ボードアベイラブルイン)と 呼び、上流側装置からプリント基…
48
7.
制御系
7-1. 制御
7-1-1. プログラムの保存
KE-3020/3020R は、本体内部の SSD に生産プログラムを保存します。
また、USB ポートを使用する事で外部記憶装置への保存も可能です。
7-1-2. 生産プログラム容量
1 回路当たり最大ステップ数 : 10,000 ステップ
1 基板当たり最大回路数 : マトリックス回路 1200
非マトリックス回路 200
1 基板当たり最大ステップ数 : 10,000 ステップ
最大部品データ数 : マウンタに装着可能な最大品種数
最大吸着データ数 : 同上
最大マーク登録数 : エリア・部品位置決めマーク 50 組。 BOC マーク 1組(2~3 個)
7-2. 生産モード
生産には、次の3つの生産モードがあります。
基板生産
生産枚数を指定し、基板を実際に生産するモード。
試打
テスト生産するためのモード。
吸着位置追尾と搭載後の搭載位置追尾が選択可能です。
空打
部品を使用せず吸着搭載の動きを確認するモード。
吸着位置追尾と搭載位置追尾が選択可能です。
49
8.
インターフェース
8-1. 電気的インターフェース
8-1-1. 電気信号の種類と意味
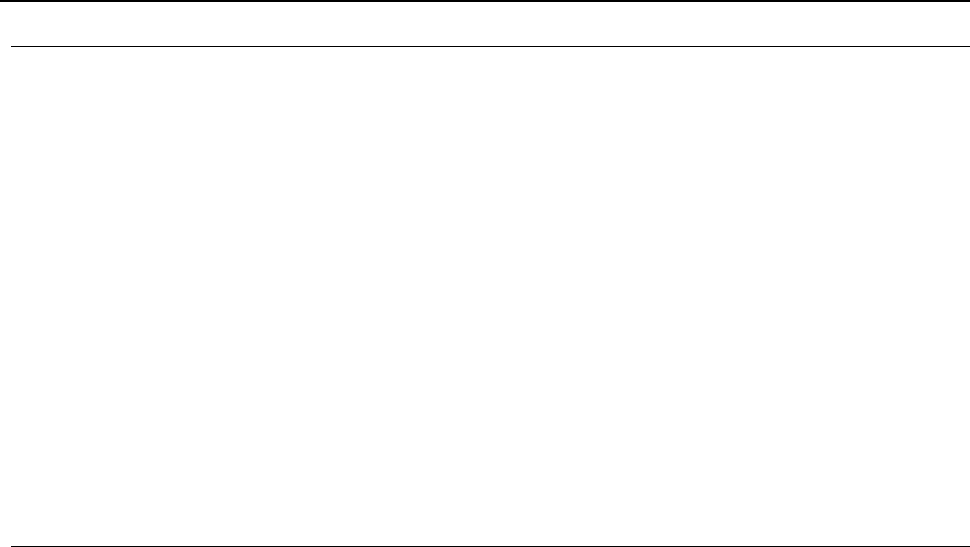
マウンタと相手側機械に関わる電気信号の接続概念図を下図の「電気信号の接続概念図」に示します。
下図の中で、マウンタと上流装置との間①②、及び下流装置との間③④の電気信号を以下に示します。
a) 電気信号①は搬出要求入力信号(または、ボードアベイラブルイン)と呼び、上流側装置からプリント基板の搬
出要求を受ける信号です。
b) 電気信号②は搬出許可出力信号(または、レディーアウト)と呼び、上流側装置に対しプリント基板を搬出させ
る信号です。
c) 電気信号③は搬出要求出力信号(またはボードアベイラブルアウト)と呼び、下流側装置に対しプリント基板の
搬出を要求する信号です。
d) 電気信号④は搬出許可入力信号(または、レディーイン)と呼び、下流側装置からプリント基板の搬出許可を
受ける信号です。
図
11
電気信号の接続概念図
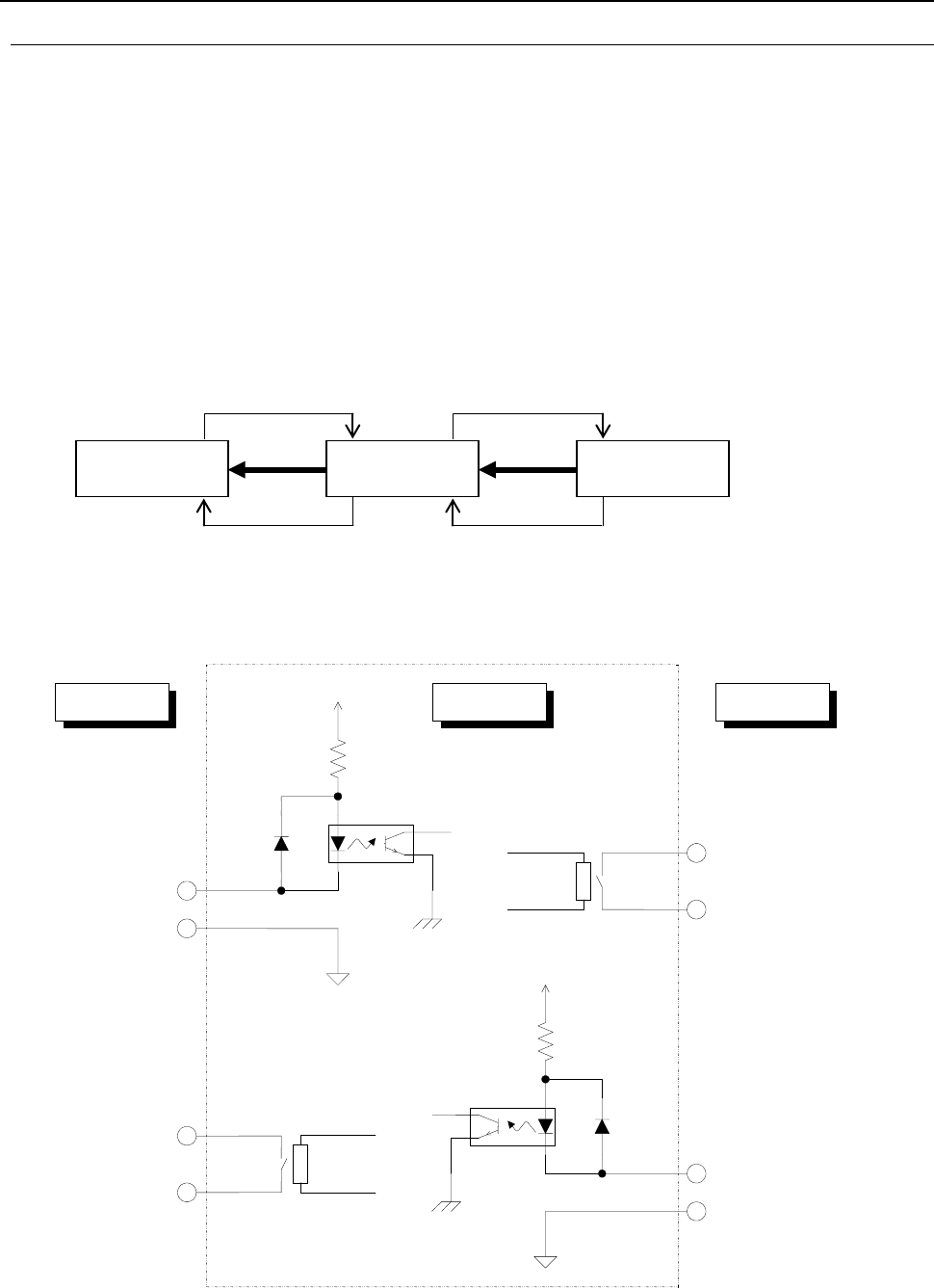
8-1-2. 入力及び出力信号インターフェース
図
12
信号インターフェースと接続ターミナル
+24V
リレー接点
+24V
リレー接点
マウンタ
下流側装置
ピン番号:1
搬出許可入力信号
ピン番号:2
搬出許可信号コモン
ピン番号:3
搬出要求出力信号
ピン番号:4
搬出要求信号コモン
上流側装置
ピン番号:1
搬出許可出力信号
ピン番号:2
搬出許可信号コモン
ピン番号:3
搬出要求入力信号
ピン番号:4
搬出要求信号コモン
下流側装置 マウンタ 上流側装置
④
③
②
①

50
8-1-3. 接続ケーブル仕様
JIS B 8438 産業用ロボット-電気装置に準拠。ケーブル長 10m 以内。
8-2. データインターフェース
LAN ポート (10/ 100 BASE T)
8-3. ユーティリティの接続
配管継手
φ8×φ12 ホース用ワンタッチ型配管継手プラグ