A10011-ASM-T46-Spec-SX12V2_DMS.pdf - 第12页
12 Maschinenleistung Bestückkopf typen SIPLACE S peedS tar (C&P20 P) SIPLACE MultiS t ar (CPP) SIPLACE T winS tar (TH) Bestückleistung Die Bestückleistung wird durch die unterschiedlich en Kopfkombin ationen und Kopf…
11
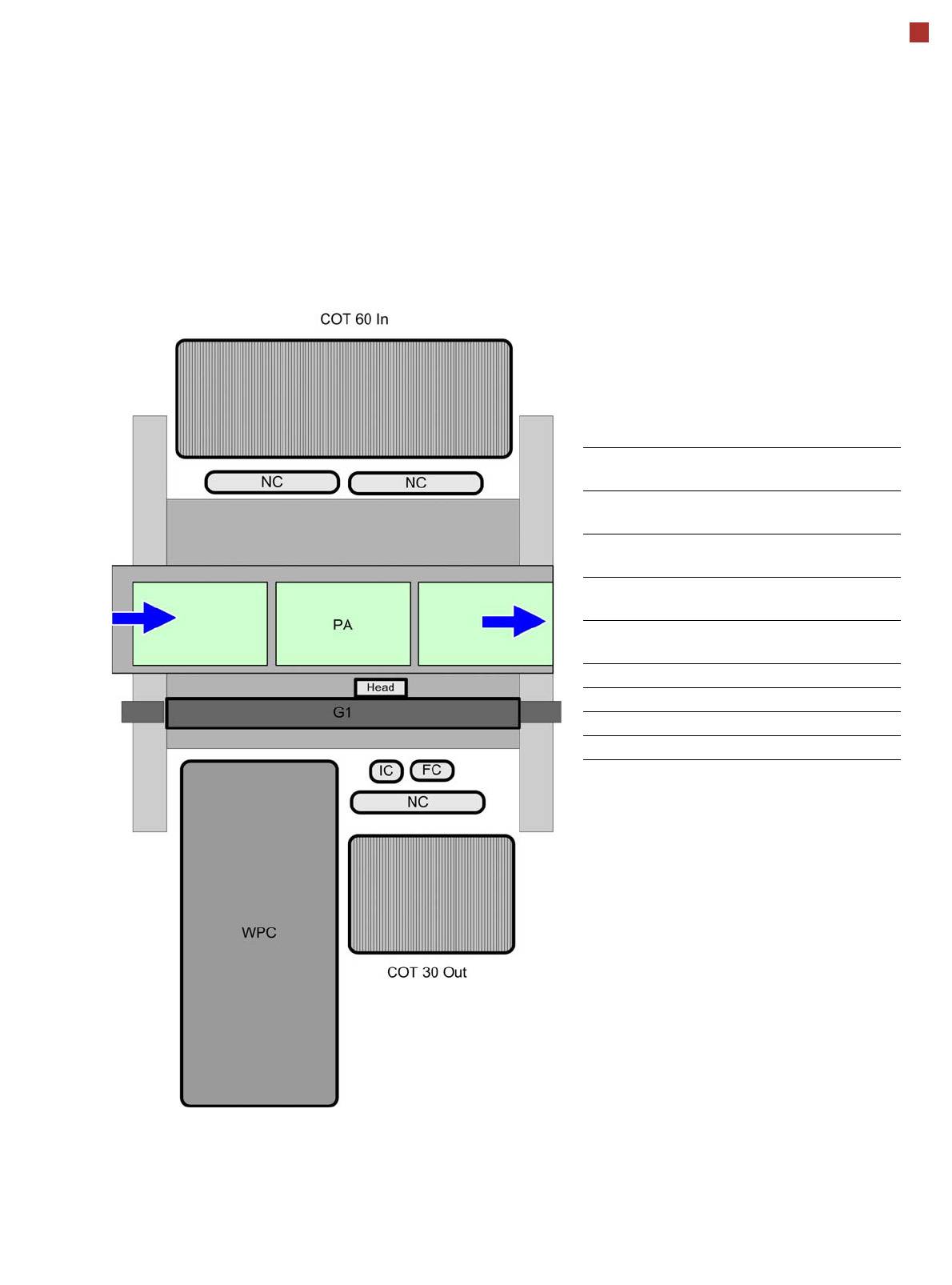
Modulares Maschinenkonzept
Beispiel SIPLACE SX1 mit WPC5/WPC6
HINWEIS: Die möglichen Kopfkonfiguration
finden Sie in Abschnitt Maschinenleistung ab
Seite 12.
COT 30 Out BE-Wagen mit 30 Spuren
an der äußeren Position
COT 60 In BE-Wagen mit 60 Spuren
an der inneren Position
WPC Waffle Pack Wechsler,
Typ 5 oder Typ 6
Head Bestückkopf gem. mögli-
cher Kopfkonfigurationen
NC Pipettenwechsler gem.
Kopfkonfiguration
IC Stationäre Kamera
FC Flip Chip Kamera
G1 Portal 1
PA Bestückbereich
12
Maschinenleistung
Bestückkopftypen SIPLACE SpeedStar (C&P20 P)
SIPLACE MultiStar (CPP)
SIPLACE TwinStar (TH)
Bestückleistung
Die Bestückleistung wird durch die unterschiedlichen Kopfkombinationen und Kopfpositionen sowie die Trans-
portkonfigurationen beeinflußt. Auch individuell unterschiedliche Optionen und die kundenspezifischen Anwen-
dungen beeinflussen die Bestückleistung. Auf Anfrage kann ASM Ihnen die jeweilige Realleistung für Ihr
Produkt auf Ihrer Maschinenkonfiguration berechnen.
IPC Wert [BE/h]
Entsprechend den herstellerneutralen Rahmenbedingungen der IPC 9850-Norm der Association Connecting
Electronics Industries.
SIPLACE Benchmark Wert [BE/h]
Der SIPLACE Benchmark Wert wird im Rahmen der Maschinenabnahme nachgewiesen und entspricht den
Bedingungen aus dem ASM Liefer- und Leistungsumfang.
Bestückautomat
SIPLACE SX2
Bestückbereich IPC Wert Benchmark Wert
C&P20 P / C&P20 P 59.000 74.000
C&P20 P / CPP
a
a) MultiStar CPP: tiefe Montageposition
48.000 60.000
CPP
b
/ CPP
b
38.000 46.000
CPP
b
/ TH
b) MultiStar CPP: hohe Montageposition
23.100 27.000
TH / TH 10.200 11.000
Bestückautomat
SIPLACE SX1
Bestückbereich IPC Wert Benchmark Wert
C&P20 P 29.500 37.000
CPP
a
19.000 23.000
TH 5.100 5.500
13
Bestückköpfe
Allgemeines
Kopfmodularität
Die SIPLACE Bestückauto-
maten zeichnen sich durch
maximale Flexibilität beim
Produktionsprozess aus.
Diese Flexibilität wird unter
anderem durch die Kopfmo-
dularität der Bestückautoma-
ten erreicht, denn abhängig
von der Produktionsanforde-
rung lassen sich unter-
schiedliche
Bestückkopfvarianten konfi-
gurieren.
Der SIPLACE SpeedStar
und der SIPLACE MultiStar
arbeiten nach dem
Collect&Place-Modus, d. h.
innerhalb eines Zyklus wer-
den 20 bzw.12 Bauelemente
abgeholt bzw. „gesammelt“,
auf dem Weg zur Leiterplatte
optisch zentriert und in die
erforderliche Bestücklage
gedreht. Anschließend wer-
den sie sanft und positions-
genau auf die Leiterplatte
aufgesetzt. Das Prinzip eig-
net sich insbesondere für die
High-Speed Bestückung von
Standardbauelementen.
Der SIPLACE MultiStar
arbeitet nach dem
Pick&Place-Prinzip. Vom
SIPLACE MultiStar werden 2
Bauelemente vom Bestück-
kopf abgeholt, auf dem Weg
zur Bestückposition optisch
zentriert und in die erforderli-
che Bestücklage gedreht.
Dieses Prinzip eignet sich
insbesondere für eine
schnelle und präzise Bestü-
ckung von großen Bauele-
menten.
Der SIPLACE MultiStar
arbeitet sowohl nach dem
Collect&Place als auch nach
dem Pick&Place-Prinzip. Im
Mixed Modus kann er diese
beiden bisher strikt getrenn-
ten Modi in einem Bestück-
zyklus kombinieren.
Pick&Place-Modus (Twin
Head)
Der hochpräzise SIPLACE
TwinStar arbeitet nach dem
Pick&Place-Prinzip. Vom
SIPLACE TwinStar werden
zwei Bauelemente vom
Bestückkopf abgeholt, auf
dem Weg zur Bestückposi-
tion optisch zentriert und in
die erforderliche Bestücklage
gedreht. Dieses Prinzip eig-
net sich insbesondere für
eine schnelle und präzise
Bestückung von Sonder-
bauelementen, für die z.B.
Greifer notwendig sind.
Control und Selflearning
Funktionen
Verschiedene Control und
Selflearning Funktionen stei-
gern die Zuverlässigkeit der
SIPLACE Bestückköpfe.
• BE-Sensor
Prüft vor dem Abhol- und
Bestückprozess die
Anwesenheit des Bauele-
ments an der Pipette
• Digitale Kameras
Prüfen die Lage jedes
Bauelementes an der
Pipette. Die Prüfung
erfolgt dabei zeitneutral in
einem Schritt, bei optima-
ler Ausleuchtung jedes
einzelnen Bauelementes.
• Kraftsensor
Überwacht die vorgegebe-
nen Aufsetzkräfte der
Bauelemente.
Mittels Sensor-Stopp-Ver-
fahren werden Höhendif-
ferenzen beim Abholen
und Wölbungen der LP
beim Bestücken ausgegli-
chen.
• Vakuumsensor
Prüft ob das Bauelement
korrekt abgeholt bzw.
abgesetzt wurde.
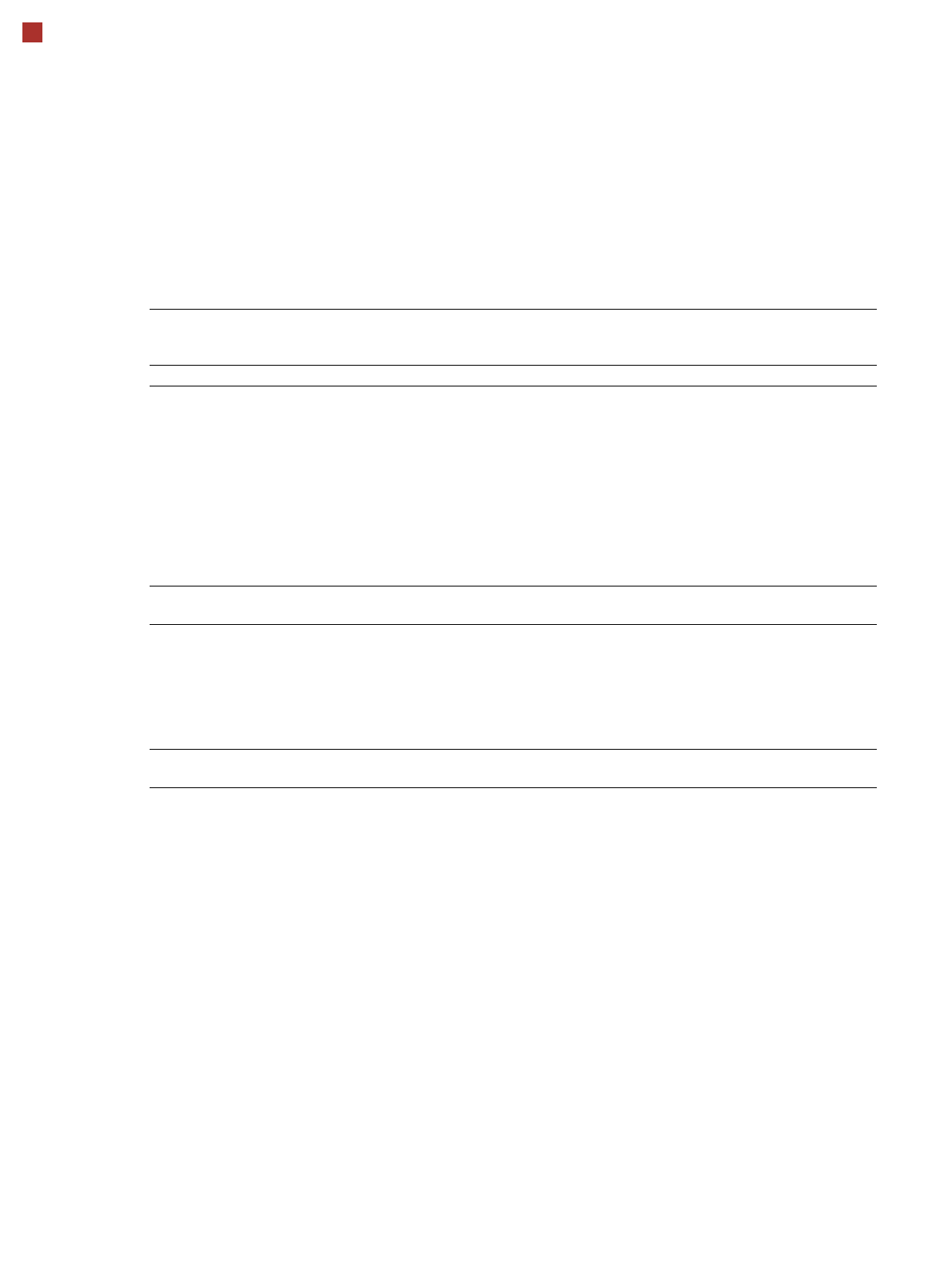
Collect&Place Modus
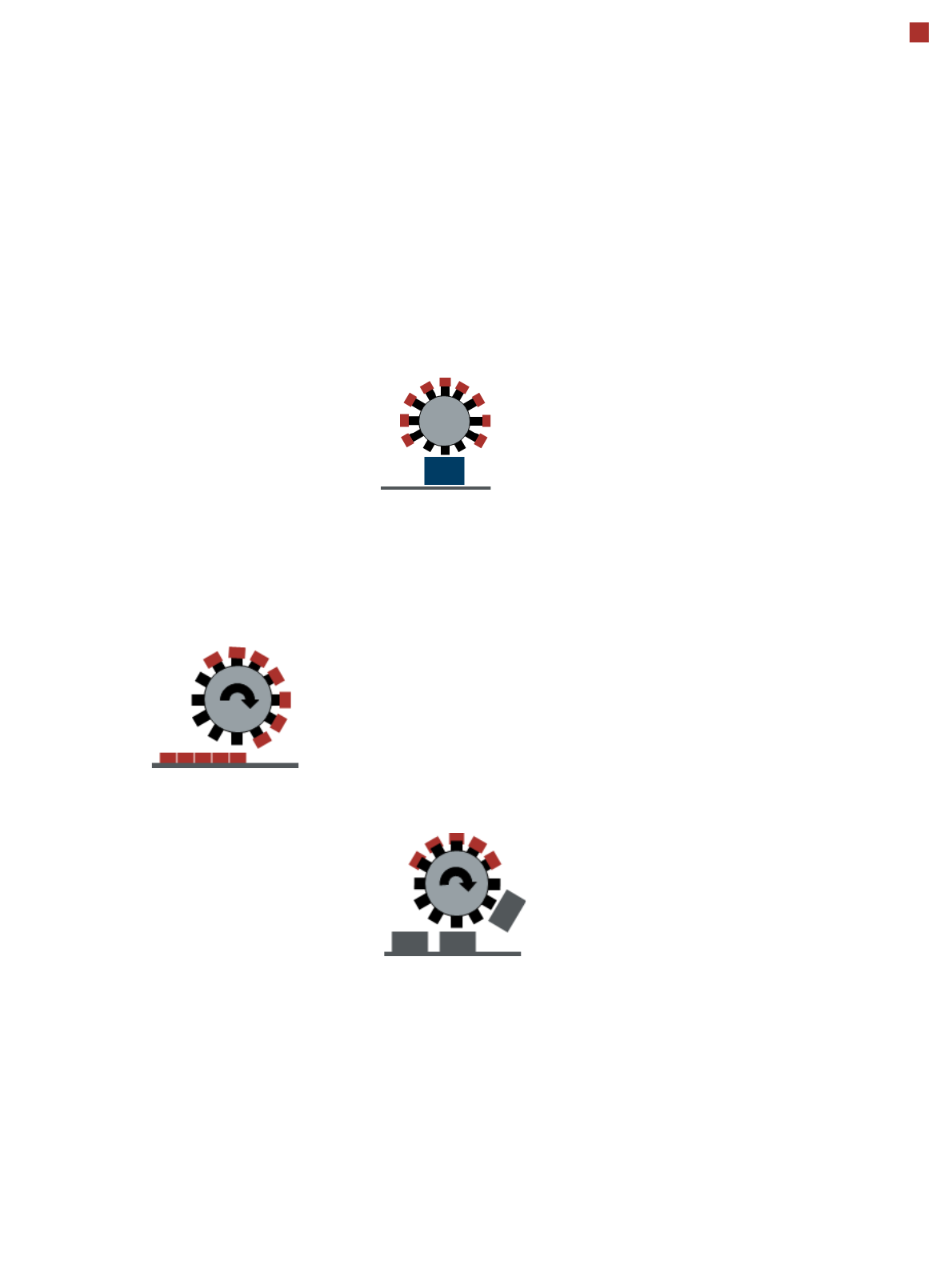
Pick&Place Modus
(SIPLACE MultiStar)
Mixed Modus