2OM-1183-003.pdf - 第157页
3.3.2.2 3.3.2.2 3.3.2.2 3.3.2.2 3.3.2.2 线路板搬运送料棘爪的调整 线路板搬运送料棘爪的调整 线路板搬运送料棘爪的调整 线路板搬运送料棘爪的调整 线路板搬运送料棘爪的调整 这是手伸入装置内部的作业, 这是手伸入装置内部的作业, 这是手伸入装置内部的作业, 这是手伸入装置内部的作业, 这是手伸入装置内部的作业, 请在切断电源的状态下 请在切断电源的状态下 请在切断电源的状态下 请在切断电源的状态下 请…
3.3.23.3.2
3.3.23.3.2
3.3.2
线路板的定位线路板的定位
线路板的定位线路板的定位
线路板的定位
(TCM-X300)(TCM-X300)
(TCM-X300)(TCM-X300)
(TCM-X300)
3.3.2.13.3.2.1
3.3.2.13.3.2.1
3.3.2.1
线路板原点位置的设定线路板原点位置的设定
线路板原点位置的设定线路板原点位置的设定
线路板原点位置的设定
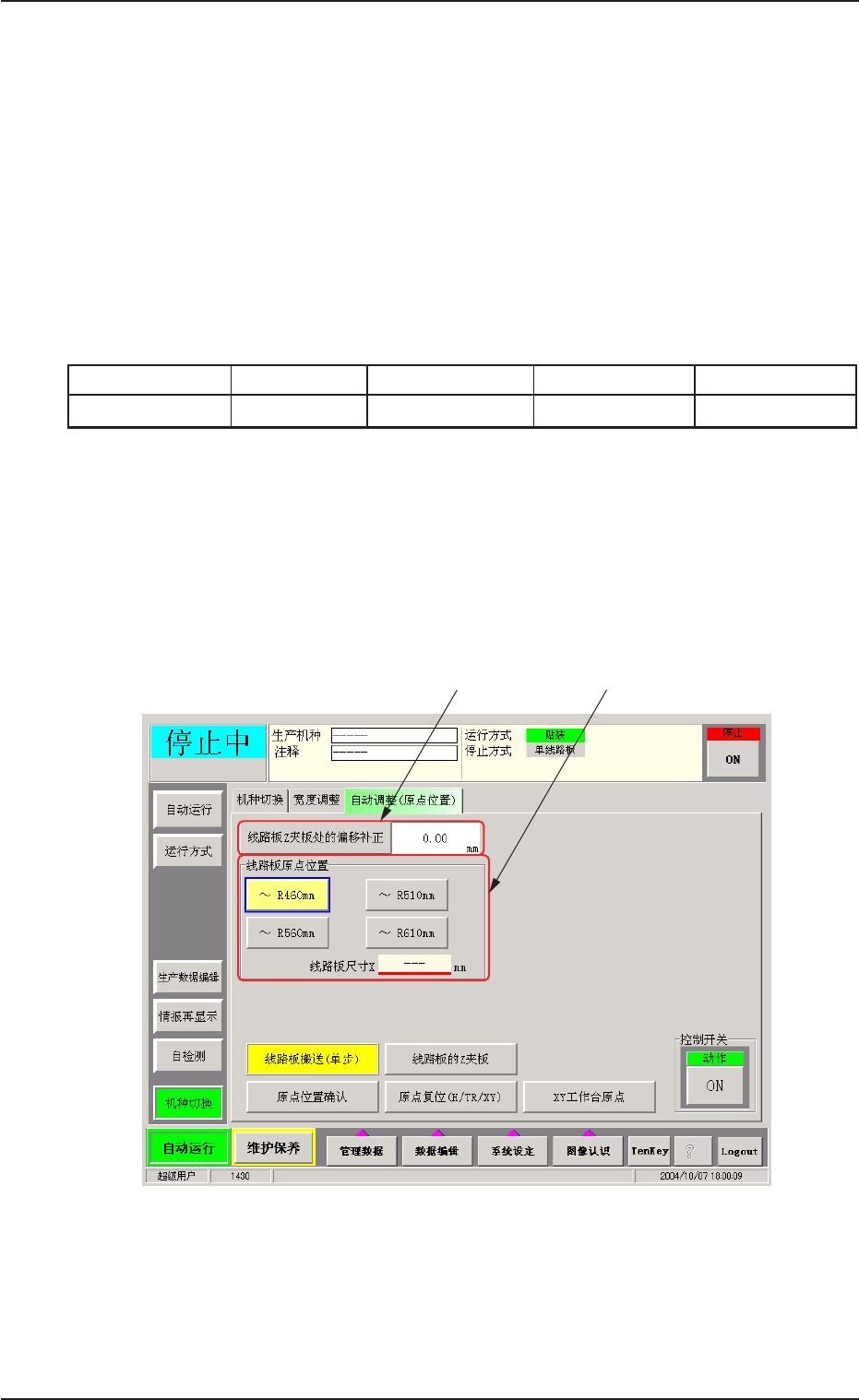
线路板原点位置设定有必要变更线路板 Z 夹板处的偏移补正和线路
板原点位置。
线路板 Z 夹板处的偏移补正的设定变更 XY 工作台滑道上的 Z 夹板位
置( 线路板原点) 为最佳线路板夹板位置。
线路板原点位置变更是对应线路板尺寸的变更。
Table 2C2Table 2C2
Table 2C2Table 2C2
Table 2C2
线路板尺寸线路板尺寸
线路板尺寸线路板尺寸
线路板尺寸
50 50
50 50
50
~~
~~
~
460460
460460
460
超过超过
超过超过
超过
460460
460460
460
~~
~~
~
510510
510510
510
超过超过
超过超过
超过
510510
510510
510
~~
~~
~
560560
560560
560
超过超过
超过超过
超过
560560
560560
560
~~
~~
~
610610
610610
610
线路板原点位置 ~R460mm ~R510mm ~R560mm ~R610mm
单位: mm
操作步骤操作步骤
操作步骤操作步骤
操作步骤
(1) 在 “ 机种切换 ” 子菜单的 “ 宽度调整( 原点位置) ” 选项卡中,按
*1*1
*1*1
*1[线路板 Z 夹板处的偏移补正] 按钮,显示 “ 线路板 Z 夹板处
的偏移补正 ” 编辑界面,输入线路板 Z 夹板处的偏移补正值,按
[ 设定] 按钮。
Fig.2C15 Fig.2C15
Fig.2C15 Fig.2C15
Fig.2C15 “
自动调整自动调整
自动调整自动调整
自动调整
((
((
(
原点位置原点位置
原点位置原点位置
原点位置
))
))
) ”
选项卡选项卡
选项卡选项卡
选项卡
(2) 在 “ 机种切换 ” 子菜单的 “ 自动调整( 原点位置) ” 选项卡中,选
中
*2*2
*2*2
*2 线路板原点位置。
*1*1
*1*1
*1
*2*2
*2*2
*2
0409-002 3-13
3.3 3.3
3.3 3.3
3.3
线路板的定位线路板的定位
线路板的定位线路板的定位
线路板的定位
3.3.2.23.3.2.2
3.3.2.23.3.2.2
3.3.2.2
线路板搬运送料棘爪的调整线路板搬运送料棘爪的调整
线路板搬运送料棘爪的调整线路板搬运送料棘爪的调整
线路板搬运送料棘爪的调整
这是手伸入装置内部的作业,这是手伸入装置内部的作业,
这是手伸入装置内部的作业,这是手伸入装置内部的作业,
这是手伸入装置内部的作业,
请在切断电源的状态下请在切断电源的状态下
请在切断电源的状态下请在切断电源的状态下
请在切断电源的状态下
进行。进行。
进行。进行。
进行。
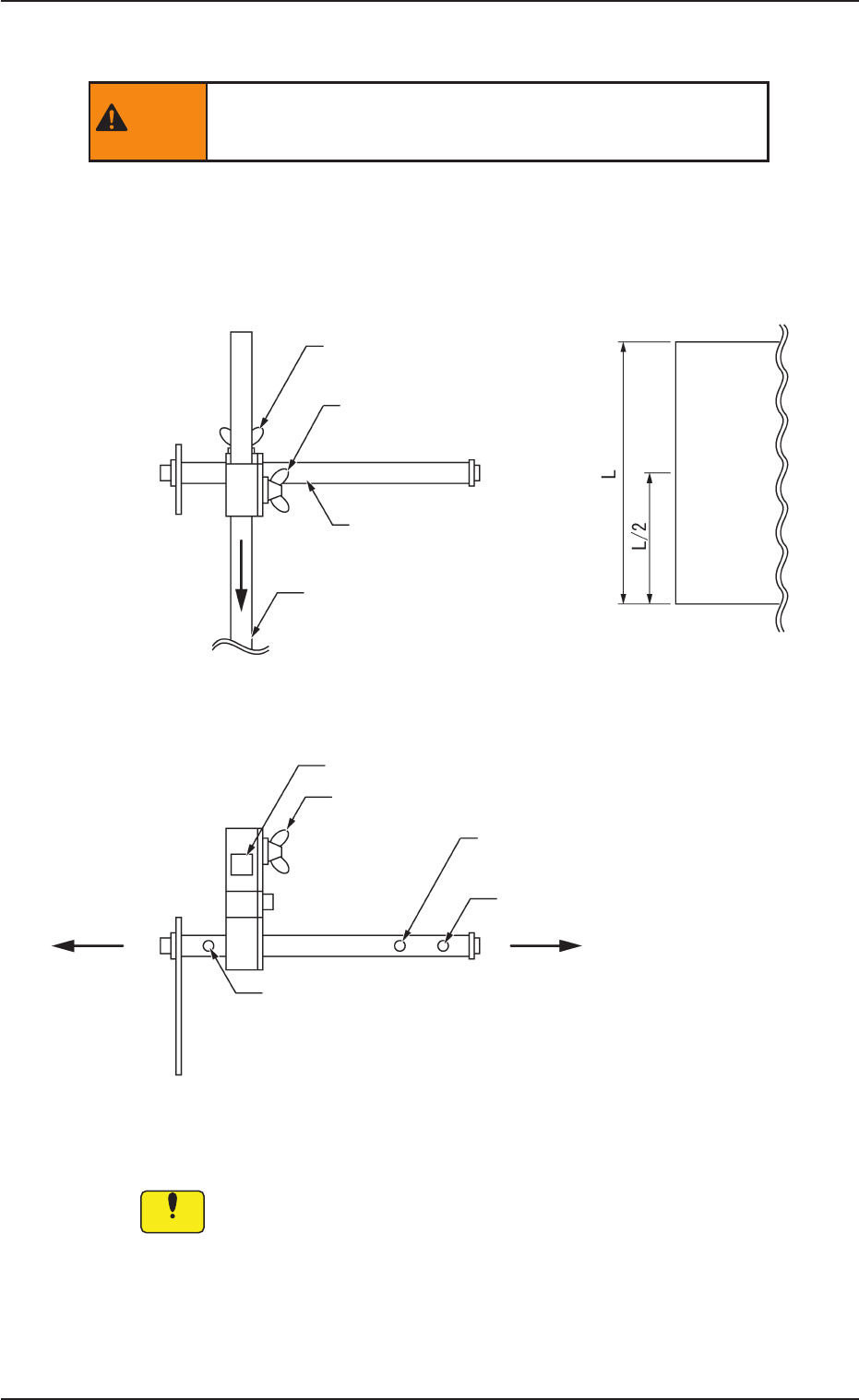
(1) 缓缓滑动线路板搬运送料棘爪的蝶形螺栓(Y 方向用) ,对准线
路板宽度的 1/2(线路板中央) 位置固定。
(2) 缓缓调整送料棘爪的蝶形螺栓(X 方向用) ,对准线路板大小。
Fig.2C16Fig.2C16
Fig.2C16Fig.2C16
Fig.2C16
将传送带的滑道宽度设定为将传送带的滑道宽度设定为
将传送带的滑道宽度设定为将传送带的滑道宽度设定为
将传送带的滑道宽度设定为 “
50mm50mm
50mm50mm
50mm”
左右时,左右时,
左右时,左右时,
左右时,
请注意不要使送料请注意不要使送料
请注意不要使送料请注意不要使送料
请注意不要使送料
棘爪碰到装置结构物。棘爪碰到装置结构物。
棘爪碰到装置结构物。棘爪碰到装置结构物。
棘爪碰到装置结构物。
0507-003 3-14
3.3 3.3
3.3 3.3
3.3
线路板的定位线路板的定位
线路板的定位线路板的定位
线路板的定位
蝶形螺栓蝶形螺栓
蝶形螺栓蝶形螺栓
蝶形螺栓
(X(X
(X(X
(X
方向调整用方向调整用
方向调整用方向调整用
方向调整用
))
))
)
蝶形螺栓蝶形螺栓
蝶形螺栓蝶形螺栓
蝶形螺栓
(Y(Y
(Y(Y
(Y
方向调整用方向调整用
方向调整用方向调整用
方向调整用
))
))
)
线路板线路板
线路板线路板
线路板
送料杆送料杆
送料杆送料杆
送料杆
(X(X
(X(X
(X
方向调整用方向调整用
方向调整用方向调整用
方向调整用
))
))
)
送料杆送料杆
送料杆送料杆
送料杆
(Y(Y
(Y(Y
(Y
方向调整用方向调整用
方向调整用方向调整用
方向调整用
))
))
)
送料杆送料杆
送料杆送料杆
送料杆
蝶形螺栓蝶形螺栓
蝶形螺栓蝶形螺栓
蝶形螺栓
(Y(Y
(Y(Y
(Y
方向调整用方向调整用
方向调整用方向调整用
方向调整用
))
))
)
固定位置固定位置
固定位置固定位置
固定位置
((
((
(
超过超过
超过超过
超过
460mm460mm
460mm460mm
460mm
~~
~~
~
560mm)560mm)
560mm)560mm)
560mm)
((
((
(
正面图正面图
正面图正面图
正面图
))
))
)
固定位置固定位置
固定位置固定位置
固定位置
((
((
(
超过超过
超过超过
超过
560mm560mm
560mm560mm
560mm
~~
~~
~
610mm)610mm)
610mm)610mm)
610mm)
固定位置固定位置
固定位置固定位置
固定位置
(50mm(50mm
(50mm(50mm
(50mm
~~
~~
~
460mm)460mm)
460mm)460mm)
460mm)
((
((
(
俯视图俯视图
俯视图俯视图
俯视图
))
))
)
Notice
警告警告
警告警告
警告
3.3.2.3.3.2.
3.3.2.3.3.2.
3.3.2.
33
33
3
XYXY
XYXY
XY
工作台的调整工作台的调整
工作台的调整工作台的调整
工作台的调整
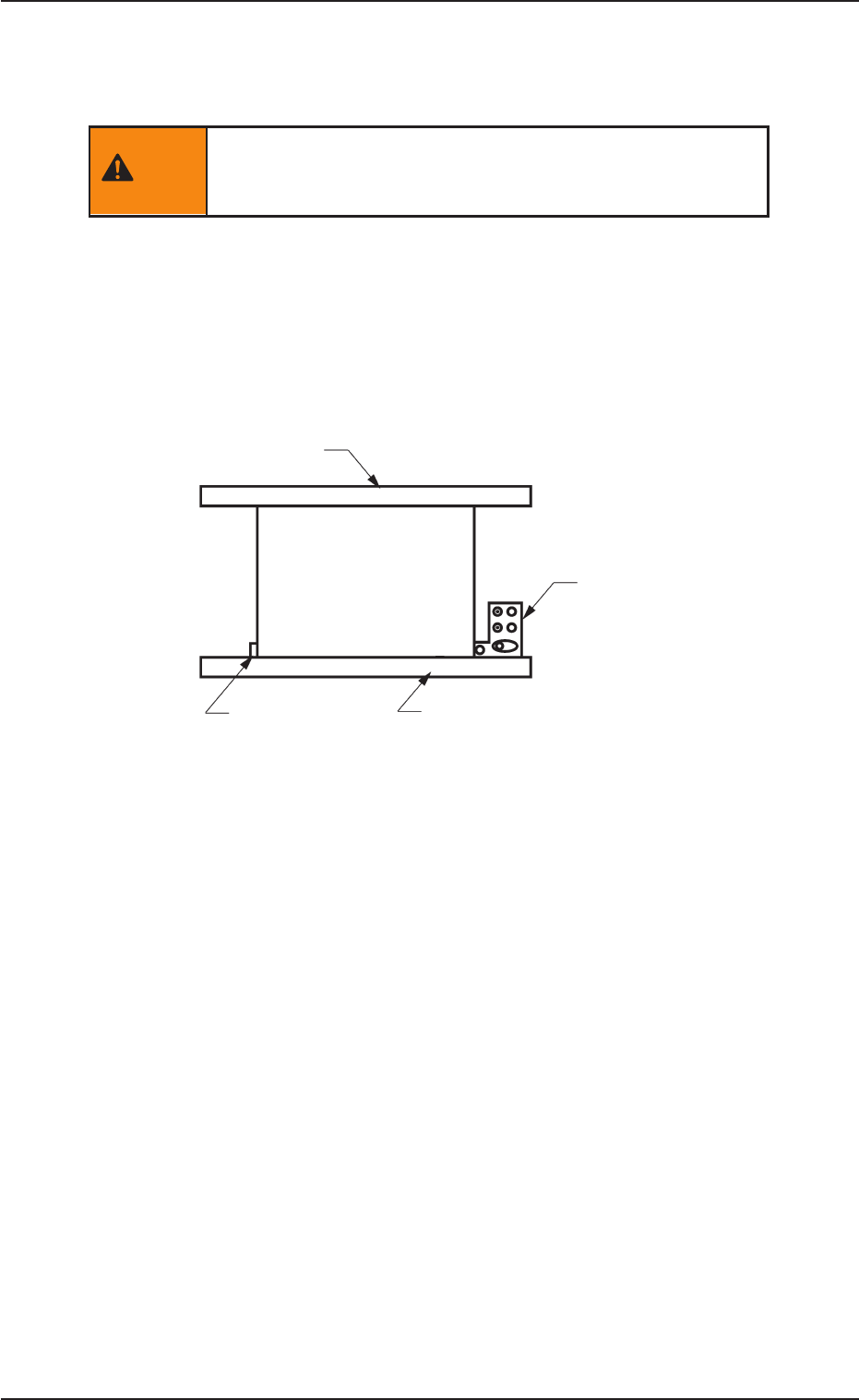
配合线路板,设置 / 调整定位销、定位杆。
这是手伸入装置内部的作业过程。这是手伸入装置内部的作业过程。
这是手伸入装置内部的作业过程。这是手伸入装置内部的作业过程。
这是手伸入装置内部的作业过程。
非常危险,非常危险,
非常危险,非常危险,
非常危险,
在整个在整个
在整个在整个
在整个
装置操作过程中,装置操作过程中,
装置操作过程中,装置操作过程中,
装置操作过程中,
请一定充分注意。请一定充分注意。
请一定充分注意。请一定充分注意。
请一定充分注意。
线路板的定位方法分为 “ 外形基准 ” 和 “ 孔基准 ” 2 种。
(1)(1)
(1)(1)
(1)
外形基准时外形基准时
外形基准时外形基准时
外形基准时
如下设置定位销( 基准侧) 和定位杆,就完成了外形基准。
Fig.2C17 Fig.2C17
Fig.2C17 Fig.2C17
Fig.2C17
线路板定位线路板定位
线路板定位线路板定位
线路板定位
((
((
(
装置上面装置上面
装置上面装置上面
装置上面
))
))
)
0507-003 3-15
3.3 3.3
3.3 3.3
3.3
线路板的定位线路板的定位
线路板的定位线路板的定位
线路板的定位
移动滑道移动滑道
移动滑道移动滑道
移动滑道
定位销定位销
定位销定位销
定位销
((
((
(
基准侧基准侧
基准侧基准侧
基准侧
))
))
)
线路板线路板
线路板线路板
线路板
定位杆定位杆
定位杆定位杆
定位杆
固定滑道固定滑道
固定滑道固定滑道
固定滑道
警告警告
警告警告
警告