YGOS V2用户操作手册.pdf - 第48页
1-38 1 基 板 程 序 的 生 成 和 编 辑 元件包装外形 吸料角度 元件包装外形 吸料角度 元件包装外形 吸料角度 元件包装外形 吸料角度 识别基准 元件包装外形 吸料角度 识别基准 元件包装外形 吸料角度 ■ 方形芯片元件 ■ MELF芯片 ■ SOP ■ 微型Tr/SOT ■ 接插件 E ■ QFP 吸料角度 65 1 17 - X6 -0 0 F : 吸 料 高 度 ( m m ) 指 吸 附 元 件 时 , 使 吸…
1-37
1
基板程序的生成和编辑
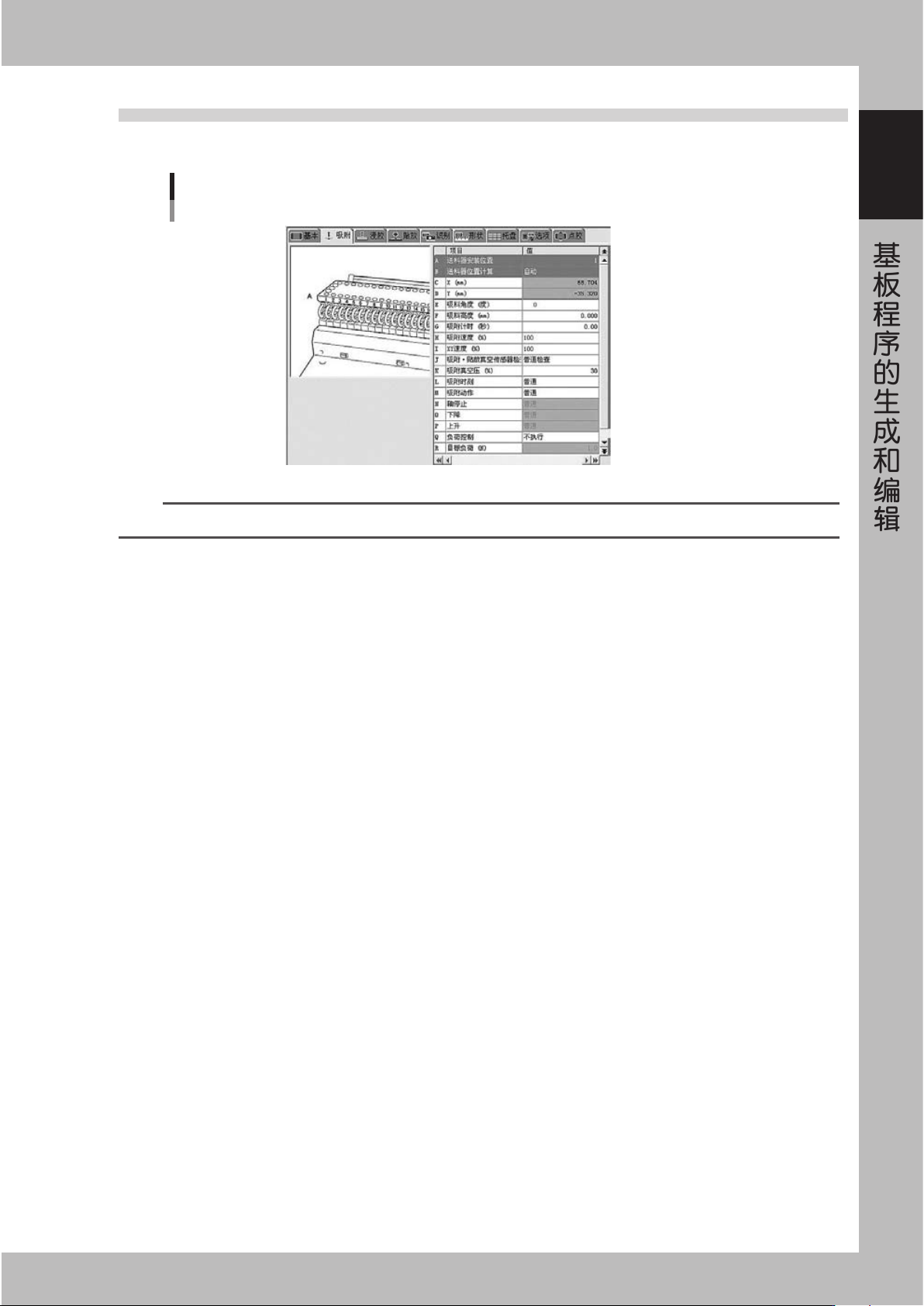
5.3 吸附参数
点击详细画面的「吸附」图标。
吸附参数
66125-X6-00
参考
根据规格不同,有不能显示的项目。
A: 送料器安装位置
输入安装送料器的送料器架的号码(送料器定位销位置)。如果将「最优化的执行」设置为「执行」就不需要设置送料器架
号码。使用固定托盘送料器供给元件时,输入距离该送料器安装处最近的送料器架的号码。如果配备了自动/外接式托盘
交换器等托盘装置,可以直接使用初始值。
B: 送料器位置计算
如果元件的供给形态为「带式」或「散装式」,可设置为「自动」。(自动计算吸附位置。)如果由杆式送料器及托盘送料器
供给元件,可设置为「示教」。
C、D:X、Y(吸附位置)(mm)
输入贴装头吸附元件时的坐标值。当「送料器位置计算」设置为「自动」时,该项目被跳过。
E: 吸料角度(度)
·输入贴装头在送料器上方吸附元件时的旋转角度。根据该设置决定识别元件时的元件方向(识别基准)。一般,元件包装
外形横方向长时设置为「0」度;纵方向长时设置为「90」度。
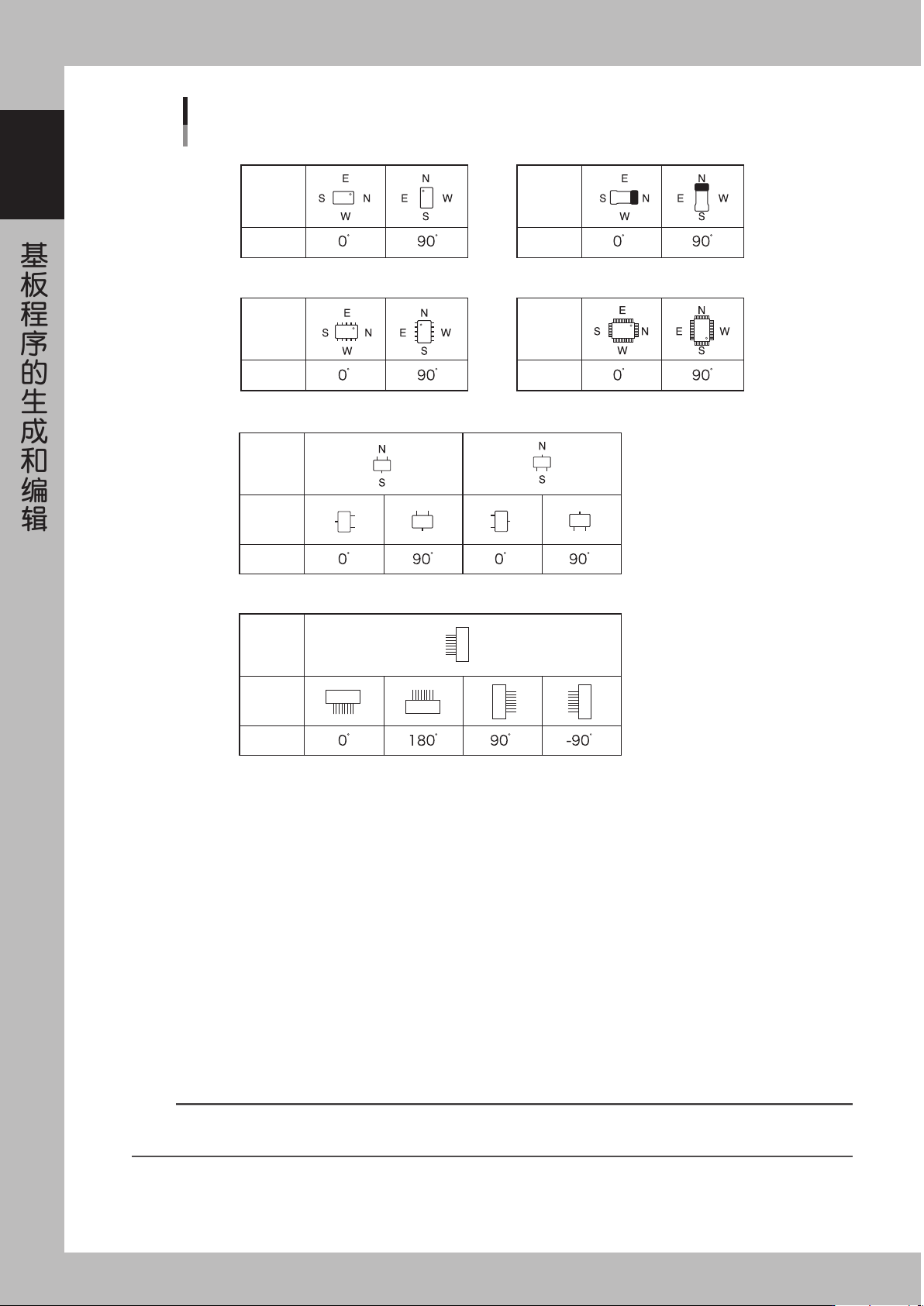
·使用散装式送料器供给元件时,必须始终设置为「90」度。输入贴装头在送料器上吸附元件时的旋转角度。
·设置晶体管的吸料角度时,必须使引脚全部对着 NS 方向设置,因此元件包装外形纵方向长(封装部的纵方向)时设置为
「0」度;横方向长时设置为「90」度。参考下表输入正确的吸料角度。
·设置 SOP 的吸料角度时,必须使引脚全部对着 EW 方向设置,因此元件包装外形横方向长(封装部的横方向)时设置为
「0」度;纵方向长时设置为「90」度。参考下表输入正确的吸料角度。
·设置接插件的吸料角度时,必须使接插件引脚全部对着 E 方向设置,参考下表输入正确的吸料角度。
1-38
1
基板程序的生成和编辑
元件包装外形
吸料角度
元件包装外形
吸料角度
元件包装外形
吸料角度
元件包装外形
吸料角度
识别基准
元件包装外形
吸料角度
识别基准
元件包装外形
吸料角度
■ 方形芯片元件 ■ MELF芯片
■ SOP
■ 微型Tr/SOT
■ 接插件 E
■ QFP
吸料角度
65117-X6-00
F: 吸料高度 (mm)
指吸附元件时,使吸嘴下降的 Z 轴的高度校正值。一般设置为「0.0」。如果要降低该高度,输入正数值,如果要升高该高度,
输入负数值。
G: 吸附计时(秒)
指吸附元件时,从感知真空压开始到吸嘴停留在下降端的时间 ( 秒 )。芯片元件等小型元件,一般都设置在「0.00」。该设置
还与外接托盘交换器连动。
H: 吸附速度 (%)
指吸附元件时,贴装头的下降轴 (Z 轴 ) 的速度。如果要进一步放慢速度,只需降低数值。一般设置为 100(%)。
I: XY 速度 (%)
指从吸附元件到贴装元件之间 XY 轴的速度。如果要进一步放慢速度,只需降低数值。一般设置为 100(%)。
J: 吸附 · 贴放真空传感器检查
一般设置为「普通检查」。如果要更严格地对吸附错误和带回元件的现象进行检查,设置为「特殊检查」。如果要对 QFP、
BGA 等元件的吸附错误和带回元件现象比其它元件作更严格的检查,设置为「特殊检查」。
n
要点
设置为「普通检查」,可以控制吸附 · 贴放元件时下降后的贴装头开始上升的时机。「真空传感器检查」的设置只在基板信息的
「负压确认」设置为「执行」时才有效。
1-39
1
基板程序的生成和编辑
K: 吸附真空压 (%)
为执行真空传感器检查而设置的基准真空压。使用数据库初始设置。
L: 吸附时刻
设置吸附元件时贴装头开始真空动作的时机。如选择「普通」,贴装头下降前开始执行真空动作,如选择「下降端」,贴装头
下降后开始执行真空动作。一般设置为「普通」。
M: 吸附动作
指吸附、贴放元件时吸嘴的下降动作。一般设置为初始值「普通」。如选择「详细设置」,可以详细设置吸附、贴放时的
「轴停止」条件和吸嘴的「上升」「下降」顺序。吸附 · 贴装 BGA 等元件需设置为「QFP 类型」。
N: 轴停止
一般设置为「普通」。吸附小型元件等对精度要求高的元件时,选择「公差等待」。(该参数只有将「M: 吸附动作」设置为
「详细设置」时才有效。)
O、P:下降、上升
设置与元件相适应的吸嘴下降及上升顺序。(该参数只有将「M: 吸附动作」设置为「详细设置」时才有效。)
Q: 负荷控制
设置是否要执行负荷控制。只有在开锁状态下,不执行接地负荷后的负荷。
R: 目标负荷 (N)
输入目标负荷。以 0.1N 为单位在 1.0N 〜 49.0N 范围内输入。
S: 吸嘴接触面偏移量(mm)
设置元件的上面(与底面相对)中最高点至吸嘴前端与元件的接触点之间的距离。