TM1629_TM1630_TM1631.娙曋壔GUI僷儔儊乕僞愢柧.pdf - 第17页
ヤマハ発動機株式会社 IM事業部 マウンター技術部 ソフト開発グループ MDOC-SOF T50035 17/34 OK NG 9. SOP 9.1. 端 端 端 端 リードフ ィット リードフィット リードフィット リードフィット リードの反射にム ラがあり、「 通常」ではうまく認識 できないSOP 部品に適してい ます。 端リ ー ド 検 出時 にリ ー ド 間の位 置 関係 を チェ ッ クし て …
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 16/34
OK
NG
A
8. ミニ
ミニミニ
ミニ Tr/SOT
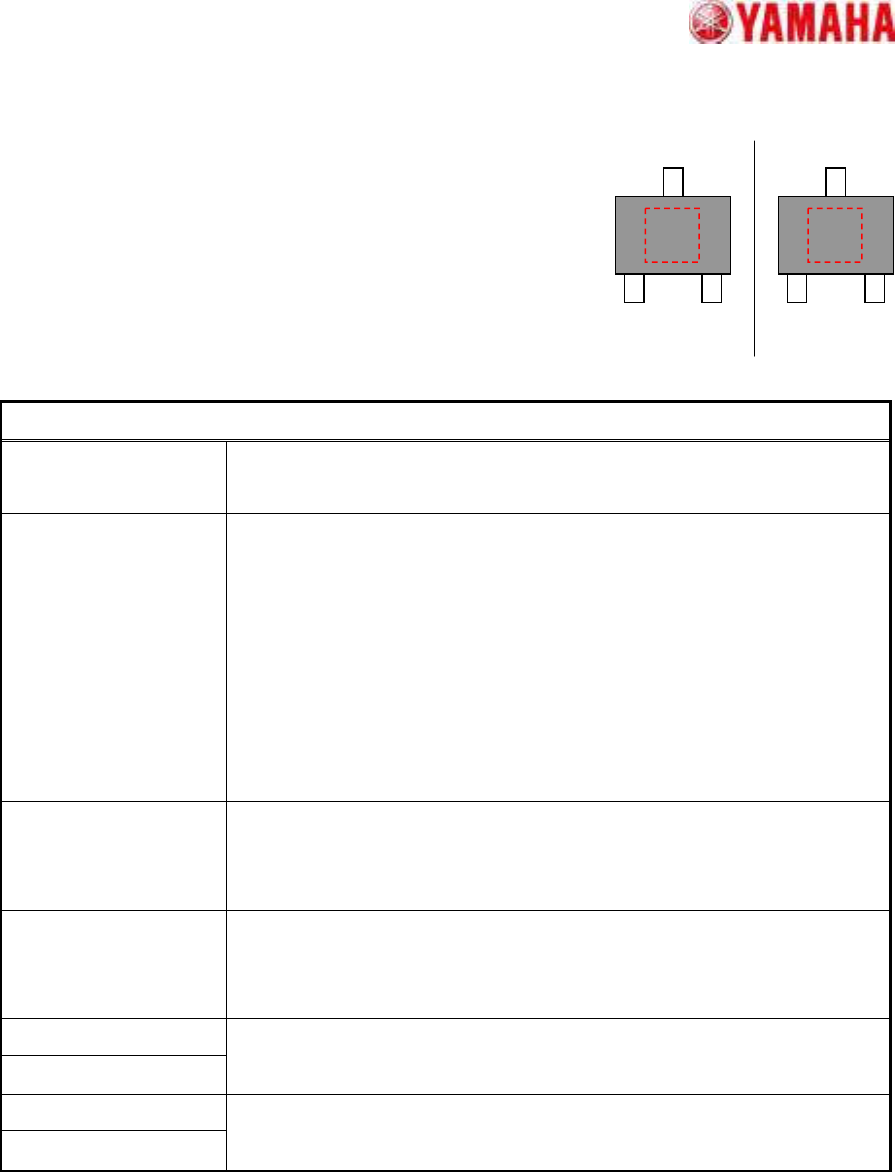
8.1. 表裏判定
表裏判定表裏判定
表裏判定
ミニTr/SOT部品の表裏判定に適しています。
指定した判定領域の輝度バラツキ(分散)をチェックすることにより、
部品の表裏判定を行います。吸着面のモールド部分に文字印刷等
がある場合に適用できます。
固有パラメータ
判定用 3σ閾値 判定用の輝度ばらつき(3σ)のしきい値を設定します。ここで指定された値と
判定領域内の輝度ばらつきとを比較します。
判定用平均輝度閾値 通常は”0”を指定します。
“0”以外の値を設定することで、過剰判定を防止できることがあります。“0”以外
の値が設定された場合、以下の3つの条件をすべて満たした場合、エラーとな
ります。
①「NG 判定条件」パラメータに「分散」が指定されている
②判定領域内の輝度ばらつきが、「判定用 3σ閾値」パラメータに指定され
た値を超えている
③判定領域内の平均輝度が、ここで指定された値を超えている
判定領域オフセット有効
「有効」が指定された場合、判定領域オフセットに指定された値に従って判定
領域をオフセットさせます。
「無効」が指定された場合、部品中央部分に判定領域を設定します。
NG 判定条件 「分散」が指定された場合、「判定用 3σ閾値」パラメータに指定された値よりも
測定値の方が大きい場合にエラーとなります。
「非分散」の場合には逆になります。
判定領域サイズ X
判定領域サイズ Y
判定領域のサイズを指定します。
判定領域オフセット X
判定領域オフセット Y
判定領域のオフセット量を指定します。
(原点:部品中心)
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 17/34
OK
NG
9. SOP
9.1. 端
端端
端リードフィット
リードフィットリードフィット
リードフィット
リードの反射にムラがあり、「通常」ではうまく認識できないSOP部品に適しています。
端リード検出時にリード間の位置関係をチェックして、最も部品定義に合致する組み
合わせを抽出することにより認識率を上げています。
固有パラメータ
余分リードチェック 「チェック有り」を指定すると、リード幅/ピッチが同じでピン数が多い部品が誤供給
された場合にエラーとします。
「チェック無し」の場合にはチェックを行いません。
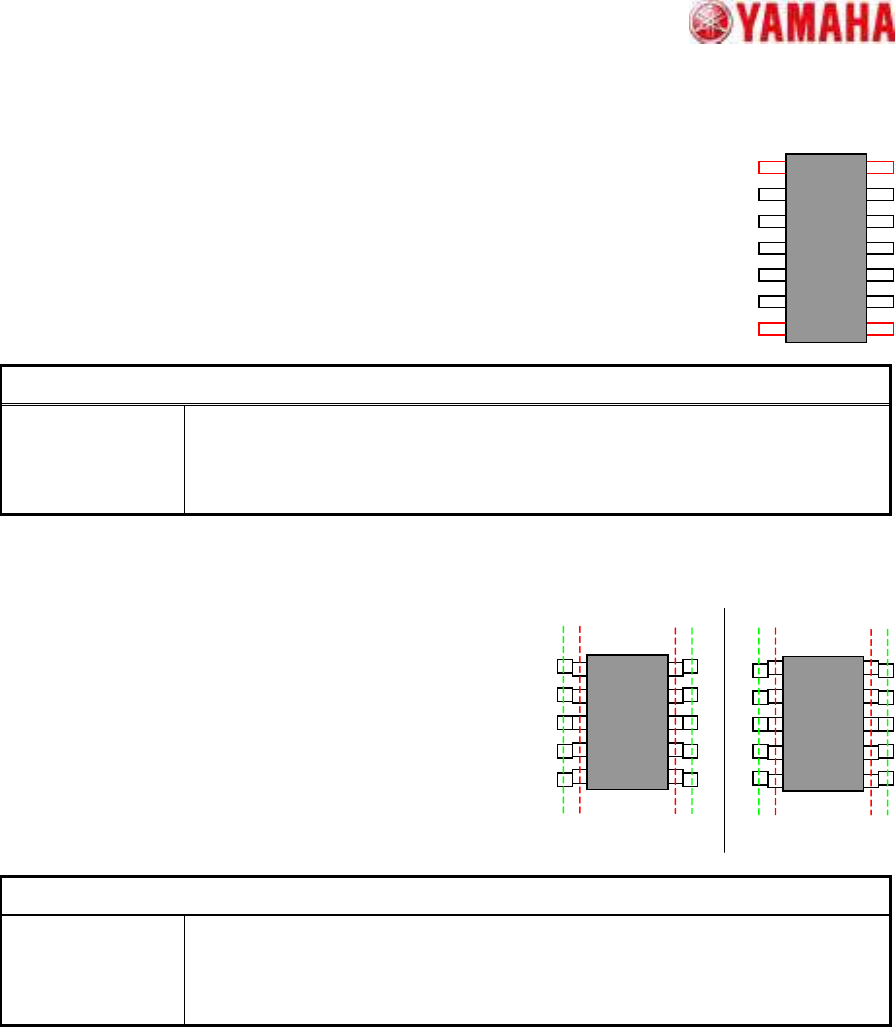
9.2. 表裏判定
表裏判定表裏判定
表裏判定
SOP部品の表裏判定に適しています。
リード先端付近のピッチと、根本付近のピッチを比較すること
で、部品の裏返りをチェックします。この認識は、シングルカメ
ラで有効です。マルチカメラでは、N/S方向にリードが並ぶよう
にすると認識可能になります。
固有パラメータ
余分リードチェック 「チェック有り」を指定すると、リード幅/ピッチが同じでピン数が多い部品が誤供給
された場合にエラーとします。
「チェック無し」の場合にはチェックを行いません。
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 18/34
OK
NG
+0
゚
+180
゚
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
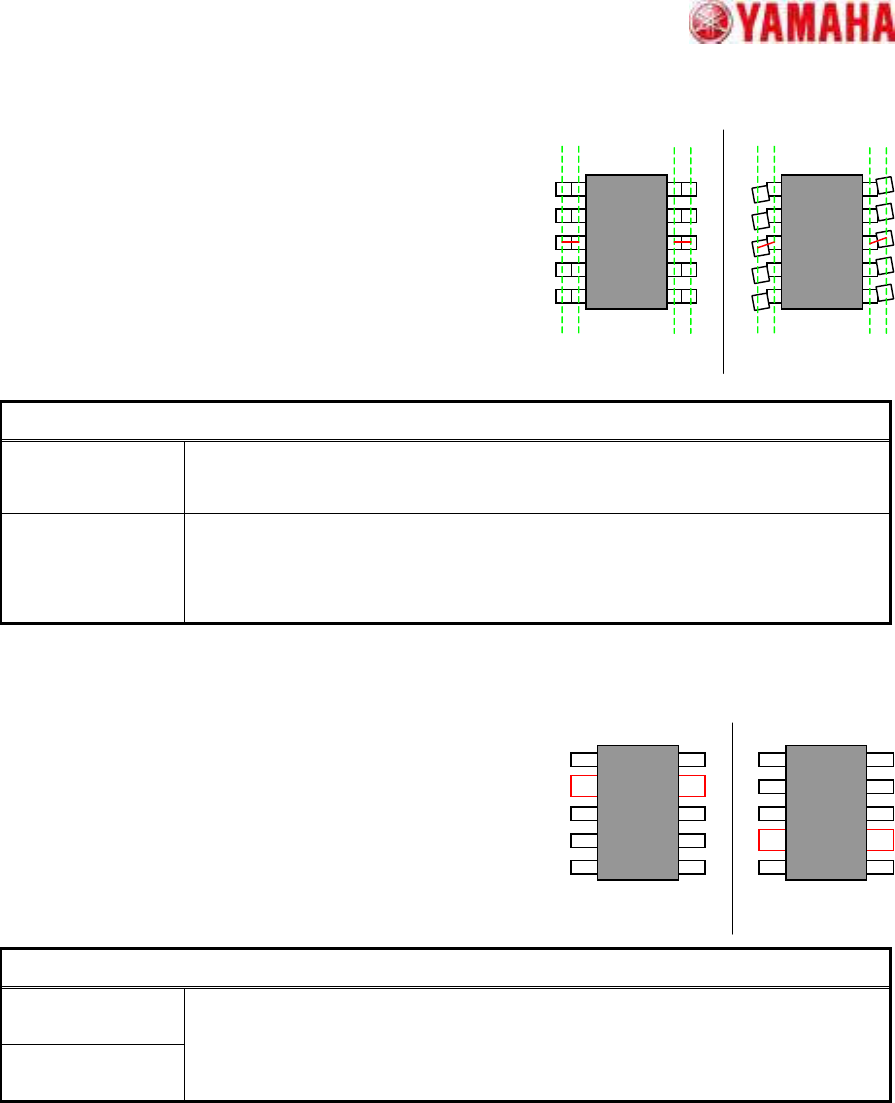
9.3. 全
全全
全リード
リードリード
リード曲
曲曲
曲り
りり
りチェック
チェックチェック
チェック
SOP部品の全リード曲りをチェックするのに適しています。
リード先端付近の列中心とリード根本付近の列中心からでリ
ード列の全体曲りを計測します。それぞれの辺で計測した曲り
角度の和の絶対値が、許容値設定より大きい場合にエラーと
します。
固有パラメータ
リード曲り角度許容
値 (度)
計測されたリード全体曲り角度が、ここに設定された値よりも大きければエラーとしま
す。”0”が指定された場合、デフォルト値”5”が適用されます。
余分リードチェック 「チェック有り」を指定すると、リード幅/ピッチが同じでピン数が多い部品が誤供給
された場合にエラーとします。
「チェック無し」の場合にはチェックを行いません
9.4. リード
リードリード
リード幅極性判定
幅極性判定幅極性判定
幅極性判定
極性リードを持つSOP部品の方向判定に適しています。
リード列中の幅広リードの位置により、部品の方向判定を行い
ます。
固有パラメータ
幅広リード位置 W
幅広リード位置 E
幅広リードが何本目にあるか指定します。
指定方向に幅広リードが存在しない場合には”0”を指定します。両方向とも”0”が指
定された場合には方向判定は実行されません。