TM1629_TM1630_TM1631.娙曋壔GUI僷儔儊乕僞愢柧.pdf - 第25页
ヤマハ発動機株式会社 IM事業部 マウンター技術部 ソフト開発グループ MDOC-SOF T50035 25/34 13. マーク マーク マーク マーク 型 型 型 型 13.1. マークライン マークライ ン マークライン マークライ ン 図の よう に、 輪 郭の一 部 が検 出範 囲 から は み出す 可 能 性のある 矩 形部 品に適しています 。 輪郭の 一部 が検出範 囲 からはみ出 し た場 合は…
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 24/34
12. 特殊形状
特殊形状特殊形状
特殊形状
12.1. 端
端端
端リードフィット
リードフィットリードフィット
リードフィット
1つの方向に形状やピッチの異なるリードが混在する部品に適しています。
最大 4方向 × 2グループ まで設定可能です。
端リード検出時にリード間の位置関係をチェックして、最も部品定義に合致する組
み合わせを抽出することにより認識率を上げています。
固有パラメータ
余分リードチェック 「チェック有り」を指定すると、リード幅/ピッチが同じでピン数が多い部品が誤供給
された場合にエラーとします。
「チェック無し」の場合にはチェックを行いません
許 容 リ ー ド 長 誤 差
(mm)
リード先端にあてはめた直線と各リード先端との差が、ここに設定された値よりも大き
ければエラーとします。
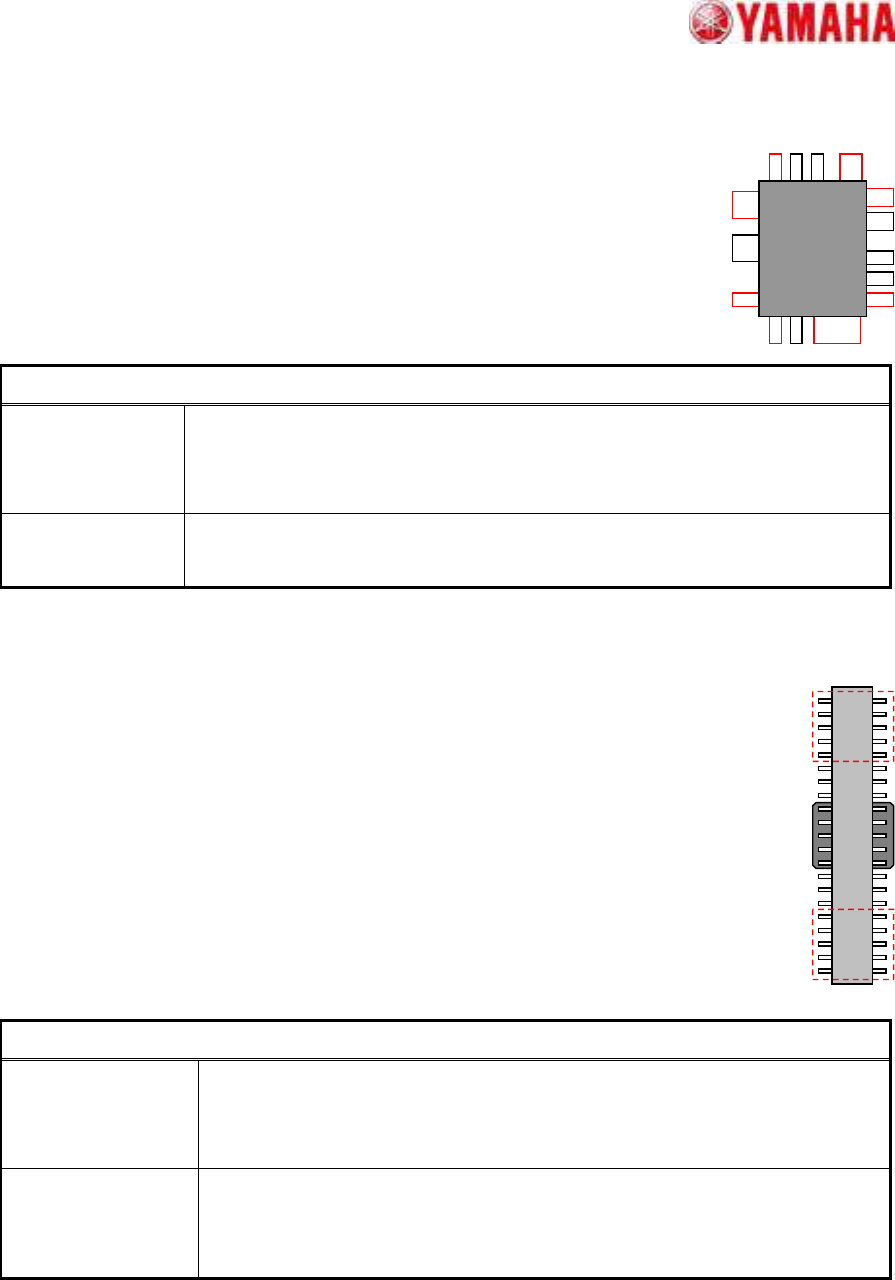
12.2. ロングコネクタ
ロングコネクタロングコネクタ
ロングコネクタ認識
認識認識
認識
吸着用クリップ等の影響で、中央部付近のリード先端がうまく検出できない部品に適してい
ます。
リード本数のチェック等は通常通り行いますが、位置決めには両端の指定数リードのみを使
用します。
固有パラメータ
検出端リード数 位置決めに使用するリード本数を指定します。
一辺,一端あたりの数を指定します(”5”を指定すると上図赤枠で示したものとな
る)。
余分リードチェック 「チェック有り」を指定すると、リード幅/ピッチが同じでピン数が多い部品が誤供
給された場合にエラーとします。
「チェック無し」の場合にはチェックを行いません。
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 25/34
13. マーク
マークマーク
マーク型
型型
型
13.1. マークライン
マークラインマークライン
マークライン
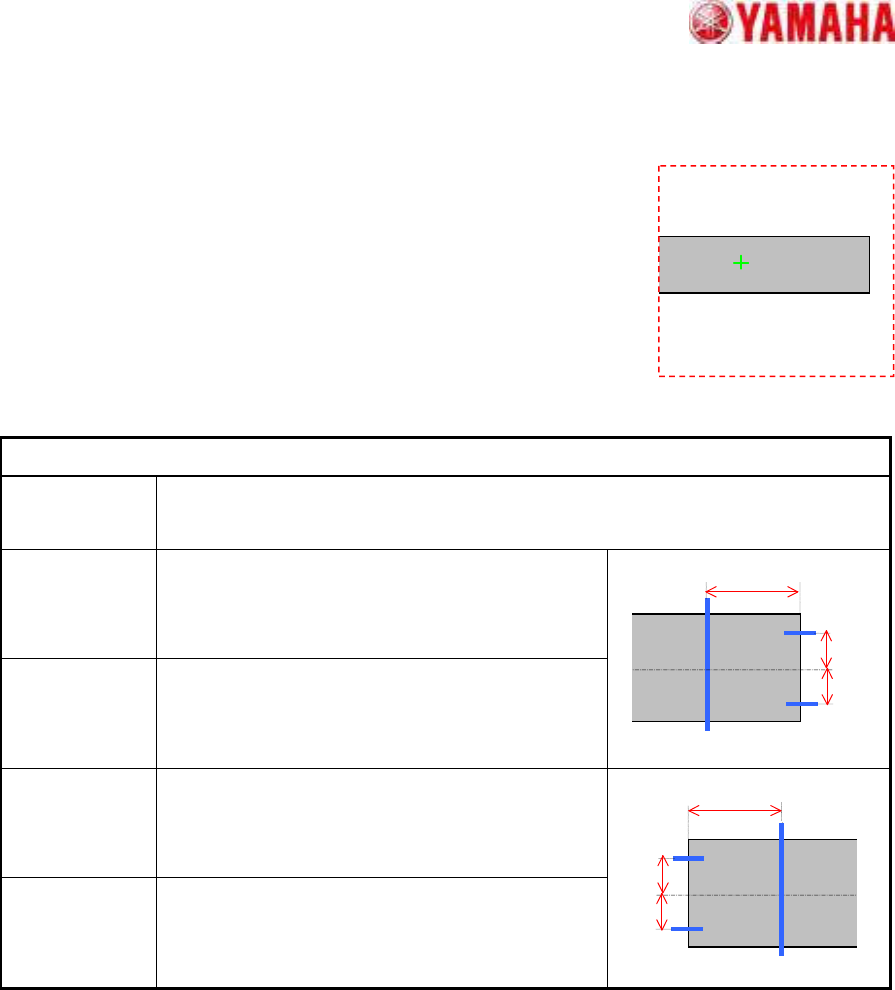
図のように、輪郭の一部が検出範囲からはみ出す可能性のある矩形部
品に適しています。
輪郭の一部が検出範囲からはみ出した場合は、残りの辺を使って
中心と角度を推定します。
検出ライン位置を自由に設定できるので、輪郭の一部に凹凸があるよう
な部品にも対応可能です。
固有パラメータ
検出方向指定 検出に使用する方向(はみ出しが発生しない方向)を指定します。
通常、「自動」を選択します。
右ラ イ ン オフセ
ット (mm)
図の A の距離を指定します。
“0”が指定された場合、検出された X サイズの 1/4 が
適用されます。
右中心ラインオ
フセット (mm)
図の B の距離を指定します。
“0”が指定された場合、検出された Y サイズの 1/4 が
適用されます。
左ラ イ ン オフセ
ット (mm)
図の C の距離を指定します。
“0”が指定された場合、検出された X サイズの 1/4 が
適用されます。
左中心ラインオ
フセット (mm)
図の D の距離を指定します。
“0”が指定された場合、検出された Y サイズの 1/4 が
適用されます。
A
B
C
D
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 26/34
13.2. 2
22
2対象
対象対象
対象
2つの特徴的な端子が存在する部品に適しています。
面積基準による端子抽出を行うので、複雑な形状の端子にも対応可能です。部品中心
は2つの端子の平均重心位置、角度は2つの重心位置を結んだ直線の傾きとして求めま
す。
固有パラメータ
自動2値化方法 「部品しきい値」が 0 の時の2値化方法を指定します。
明暗判別
白黒の分離状態が最も良くなるしきい値を自動探索します。
端子部とベース部のコントラストが高い場合に適しています。
面積基準
端子として定義された面積相当が白となるようにしきい値を決定し
ます。端子以外に反射物が無い場合に適しています。
端子形状による抽出
「する」が設定された場合、端子候補抽出時に形状評価を行います。
「しない」が設定された場合には、面積のみを評価します。
角度検出範囲 上下端子の形状,サイズが異なる場合の方向判定動作を指定します。
「±90°」が指定された場合、方向判定を行いません。
「±180°」が指定された場合、方向判定を行います。
サイズチェック方法 認識により得られた、端子部の外接長方形のサイズチェック方法を指定します。
「外形寸法」が指定された場合、部品データの外形寸法と比較します。
「端子外接寸法」が指定された場合、部品データの端子部の外接長方形と比較し
ます。
2値化レベル補正 「部品しきい値」が 0,且つ「自動2値化方法」が「面積基準」の場合にのみ有効と
なるパラメータです。
検出対象となる端子以外に白く見える部分がある場合に、その白く見える部分の
端子部面積に対する割合を指定します。
端子幅 (mm)
端子長 (mm)
端子部分のサイズを指定します。
「端子長」に 0 を設定すると、「端子幅」を直径とする円形となります。
検出位置 Y (mm) 端子部の Y 方向重心位置を指定します。(原点:部品中心)