TM1629_TM1630_TM1631.娙曋壔GUI僷儔儊乕僞愢柧.pdf - 第28页
ヤマハ発動機株式会社 IM事業部 マウンター技術部 ソフト開発グループ MDOC-SOF T50035 28/34 13.4. 汎用 汎用 汎用 汎用 3つ以上の特徴的な端子 が存在する部品 に適して います。 面積基準による端 子抽出を行うので、複 雑な形状の 端子にも対 応可能です。 固有パラメータ ピッチチェ ック 厳密なピッチチェックを実 施するかどう かを指定し ます。 自動2値化方法 「部…
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 27/34
13.3. 4
44
4対象
対象対象
対象
図のように、矩形の四隅に端子が存在する部品に適しています。
端子の内側エッジを基準として位置決めを行います。
固有パラメータ
端子幅チェック方向
検出ライン位置 N/W
検出ライン位置 S/E
(特注認識用予約パラメータ)
端子幅 (mm)
端子長 (mm)
端子部分のサイズを指定します。
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 28/34
13.4. 汎用
汎用汎用
汎用
3つ以上の特徴的な端子が存在する部品に適しています。
面積基準による端子抽出を行うので、複雑な形状の端子にも対応可能です。
固有パラメータ
ピッチチェック 厳密なピッチチェックを実施するかどうかを指定します。
自動2値化方法 「部品しきい値」が 0 の時の2値化方法を指定します。
明暗判別
白黒の分離状態が最も良くなるしきい値を自動探索します。
端子部とベース部のコントラストが高い場合に適しています。
面積基準
端子として定義された面積相当が白となるようにしきい値を決定し
ます。端子以外に反射物が無い場合に適しています。
端子位置チェック 検出した端子位置と定義した端子位置とのズレのチェックを実施するかどうかを指
定します。
端子抽出方法 コーナー端子の抽出方法を指定します。
通常は「厳密」を使用します。コーナー端子の抽出が安定しない場合には「公差
連動」にすると認識率が向上する場合があります。
追跡リトライ 「あり」の場合、検出に成功した端子の情報を基に、検出失敗した端子を再探索し
ます。
コントラストの低い部品等の場合、「あり」にすると認識率が向上することがありま
す。
最適配置角度検出 「なし」以外が設定された場合、定義形状を 90 度毎 4 または 2 角度回転させて認
識し、最も定義に近い電極配置の角度を求めます。
非回転対称,または 180 度回転対称で、45 度を超える供給角度のばらつきがあ
る部品の場合に使用します(90 度回転対称の部品に適用すると誤った角度で搭
載してしまう可能性があります)。
部品中心検出方法 部品中心位置の計算方法を指定します。
外 接 長 方 形
中心
検出した端子群に外接する長方形の中心を部品中心とします
各 辺 直 線 矩
形中心
各辺の中心(その辺に含まれる端子の重心位置の平均)を通る
部品傾きの直線で構成される長方形の中心を部品中心としま
す。
全リード中心
全端子の重心位置を平均し、定義形状から計算したオフセット
量で補正した値を中心位置とします。
プリ実行時しきい値 (未使用パラメータ)
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 29/34
+0 ゚ +180 ゚
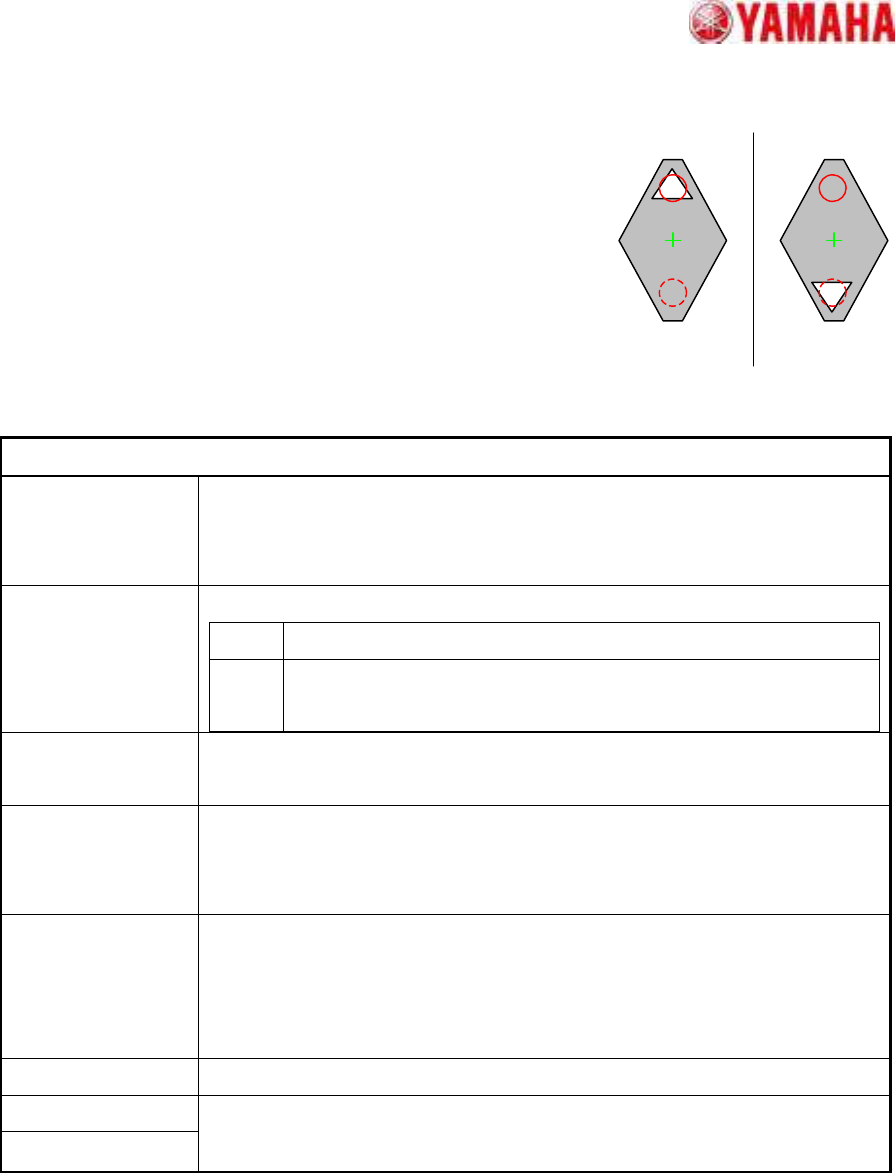
13.5. 方向判定
方向判定方向判定
方向判定
外形が1つの輪郭からなり、主軸が明確な部品の方向判定に適していま
す。
指定した円領域と180゚対向する円領域の平均輝度を比較して、方向
判定を行います。認識面に極性を示すマーク等がある場合に適用でき
ます。
固有パラメータ
角度対象辺 「角度検出方法」が「直線」の時のみ有効なパラメータです。
部品傾き算出に使用したい方向を選択します。
すべて「非選択」が指定された場合、すべての方向を使用します。
角度検出方法 角度計算方法を指定します。
追跡 検出した輪郭の主軸の傾きを部品の傾きとします。
直線 「角度対象辺」で指定された方向のあてはめ直線の傾きの平均を部品
の傾きとします。
チェック対象 指定した輝度測定領域の輝度が、回転対称位置の輝度よりも明るい事が期待さ
れる場合には「白」を、逆の場合には「黒」を指定します。
検出角度 方向判定を行う角度を指定します。
0°/180°の判定を行いたい場合には「2角度」、0°/90°/180°/270°
の判定を行いたい場合には「4角度」を指定します。
最小輝度差 方向判定結果の信頼性を確保するためのパラメータです。
指定した輝度測定領域の平均輝度と、回転対称位置の平均輝度との差が、ここに
設定された値より小さい場合、エラーとなります。
“0”が指定された場合、デフォルト値”50”が適用されます。
検出円直径 (mm) 輝度測定を行う円形領域の直径を指定します。
検出円中心位置 X
検出円中心位置 Y
輝度測定を行う円形領域の中心位置を指定します。
(原点:部品中心)