TM1629_TM1630_TM1631.娙曋壔GUI僷儔儊乕僞愢柧.pdf - 第5页
ヤマハ発動機株式会社 IM事業部 マウンター技術部 ソフト開発グループ MDOC-SOF T50035 5/34 1. 標 準 標準 標準 標準 チップ チップ チップ チップ 1.1. 電極欠 電極欠 電極欠 電極欠 け け け け チップ チップ チップ チップ 認識 認識 認識 認識 一部の角が 欠けているチップ部品に 適していま す。 固有パラメータ 欠け方向 欠けが存在する方向 を指定します 複数吸着チ…

ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 4/34
11.1. 端リードフィット
..........................................................................................................21
11.2. NS 基準認識
.............................................................................................................22
11.3. WE 基準認識
............................................................................................................22
11.4. 方向判定
..................................................................................................................23
12. 特殊形状.........................................................................................................................24
12.1. 端リードフィット
..........................................................................................................24
12.2. ロングコネクタ認識
....................................................................................................24
13. マーク型..........................................................................................................................25
13.1. マークライン
..............................................................................................................25
13.2. 2対象
......................................................................................................................26
13.3. 4対象
......................................................................................................................27
13.4. 汎用
.........................................................................................................................28
13.5. 方向判定
..................................................................................................................29
13.6. 2対象(端子角度)
.....................................................................................................30
14. 特殊長方形 .....................................................................................................................31
14.1. 方向判定
..................................................................................................................31
14.2. シールド部品
............................................................................................................32
14.3. 表裏判定
..................................................................................................................33
14.4. 4角基準認識
............................................................................................................34
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 5/34
1. 標準
標準標準
標準チップ
チップチップ
チップ
1.1. 電極欠
電極欠電極欠
電極欠け
けけ
けチップ
チップチップ
チップ認識
認識認識
認識
一部の角が欠けているチップ部品に適しています。
固有パラメータ
欠け方向 欠けが存在する方向を指定します
複数吸着チェック 部品を複数個吸着しているかどうかのチェックを行います。
有効にした場合、部品の外部に余分なエッジが存在していればエラーとなります。
※このパラメータは VGOS V2.xx、YGOS V2.xx では使用できません
1.2. 電極輝度
電極輝度電極輝度
電極輝度チェック
チェックチェック
チェック
標準的なチップ部品に適しています。
「通常」と同じ認識ですが、チェック条件をより詳細に設定することができます。部品識
別輝度を設定(認識テストで自動設定)すると、電極部分の輝度を確認して、部品の有
無を判別します。
固有パラメータ
複数吸着チェック 部品を複数個吸着しているかどうかのチェックを行います。
有効にした場合、部品の外部に余分なエッジが存在していればエラーとなります。
部品識別輝度 部品電極部の最低輝度を指定します。
ここに設定された値よりも電極部の平均輝度が暗い場合、エラーとなります。
(アルゴリズム:「通常」の時の、認識タブ内の同名パラメータと同じ機能です)
チェック方法 ノズル誤認識防止機能を指定します。
A:リード輝度 上記の「部品識別輝度」のチェックのみ行います
A & 対称性 部品の縦方向中心線上での対称性を評価します
A & 輝度差 部品の横方向中心線上での輝度のばらつきを評価します
台形許容度(%) 良品として許容できる台形度を設定します。
{(上下電極幅の差)/(狭い方の電極幅)}が、ここに設定した値よりも大きければエ
ラーとなります。
‘0’が設定された場合、チェックは行われません。
ヤマハ発動機株式会社
IM事業部 マウンター技術部
ソフト開発グループ
MDOC-SOFT50035 6/34
+0
゚ +180 ゚
1.3. 方向判定
方向判定方向判定
方向判定
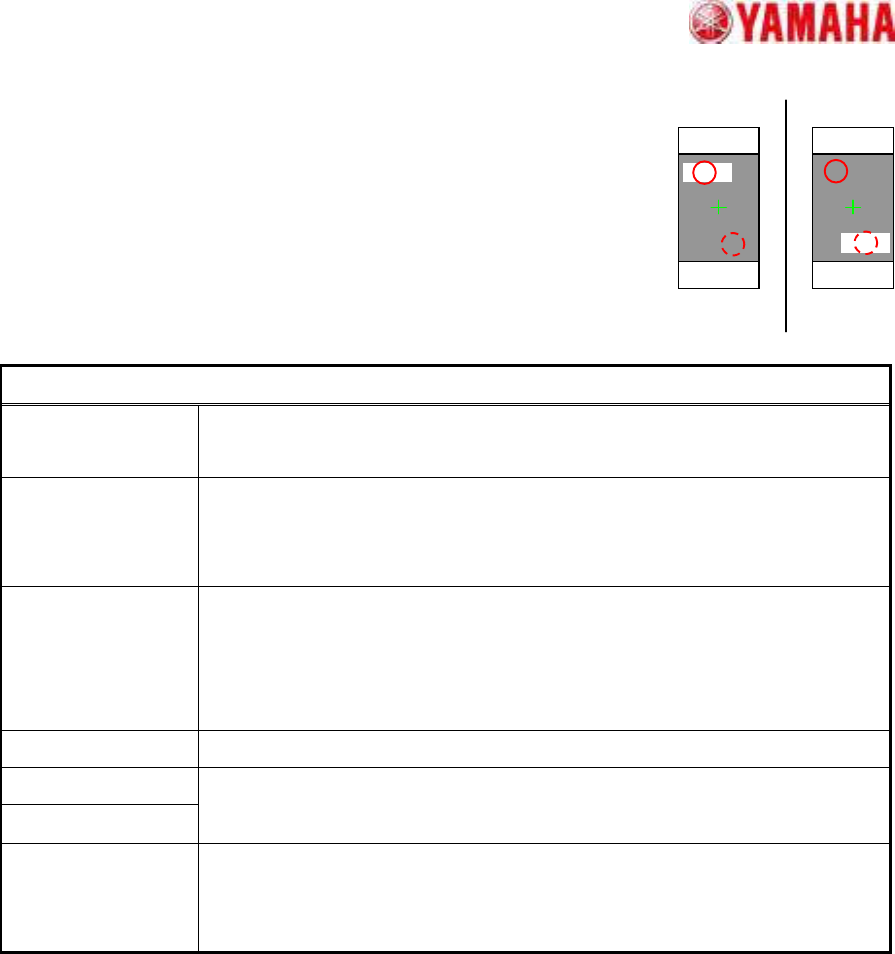
チップ部品の方向判別に適しています。
指定した円領域と180゚対向する円領域の平均輝度を比較して、方向判定を
行います。認識面に極性を示すマーク等がある場合に適用できます。
固有パラメータ
チェック対象 指定した輝度測定領域の輝度が、回転対称位置の輝度よりも明るい事が期待さ
れる場合には「白」を、逆の場合には「黒」を指定します。
検出角度 方向判定を行う角度を指定します。
0°/180°の判定を行いたい場合には「2角度」、0°/90°/180°/270°
の判定を行いたい場合には「4角度」を指定します。
最小輝度差 方向判定結果の信頼性を確保するためのパラメータです。
指定した輝度測定領域の平均輝度と、回転対称位置の平均輝度との差が、ここに
設定された値より小さい場合、エラーとなります。
“0”が指定された場合、デフォルト値”50”が適用されます。
検出円直径 (mm) 輝度測定を行う円形領域の直径を指定します。
検出円中心位置 X
検出円中心位置 Y
輝度測定を行う円形領域の中心位置を指定します。
(原点:部品中心)
複数吸着チェック 部品を複数個吸着しているかどうかのチェックを行います。
有効にした場合、部品の外部に余分なエッジが存在していればエラーとなります。
※このパラメータは VGOS V2.xx、YGOS V2.xx では使用できません