CP-65(E)第1調整検査手順書第7版..pdf - 第13页
3. 6 X Ytable h 垂直度,直角度测定确认 .带磁铁的直角治具,基准轨道,从属轨道的上面、千分表在 X 方向的 0.300mm 的位置设置 0、测定垂直度。 测定完 Y 方向的直角度之后,再测 Y 方向的垂直度。 3.7 测定基准 PIN 和从属 PIN 的平行度 13
12
<补充》Z 轴调整的说明
Table 高度 table 从最高点下降到 7mm 以下
Counter 的位置 table 最高处。
ZO 11st 吸嘴吸取往下时,从基板上面下到 0.3mm 的状态,是 Z 轴的 Counter 值。
(IP 系的是 M/C 基板上面 ZO)
吸取时 Z 轴的范围 ZO~(ZO-3000)PULSE
MARK 读取位置从 ZO 下降到 6.0mm 的位置,其它不动。
ZO 的范围 -880 到-1000pulse 之间
Linit pos.Z 的范围 +侧 counter 320 的位置
-侧 Counter -4500 的位置
OT Sensor 位置 从 M/C stopper 脱离 300pulse 程度的位置
在 Linit pos.Z M/C STOPPER 一面有
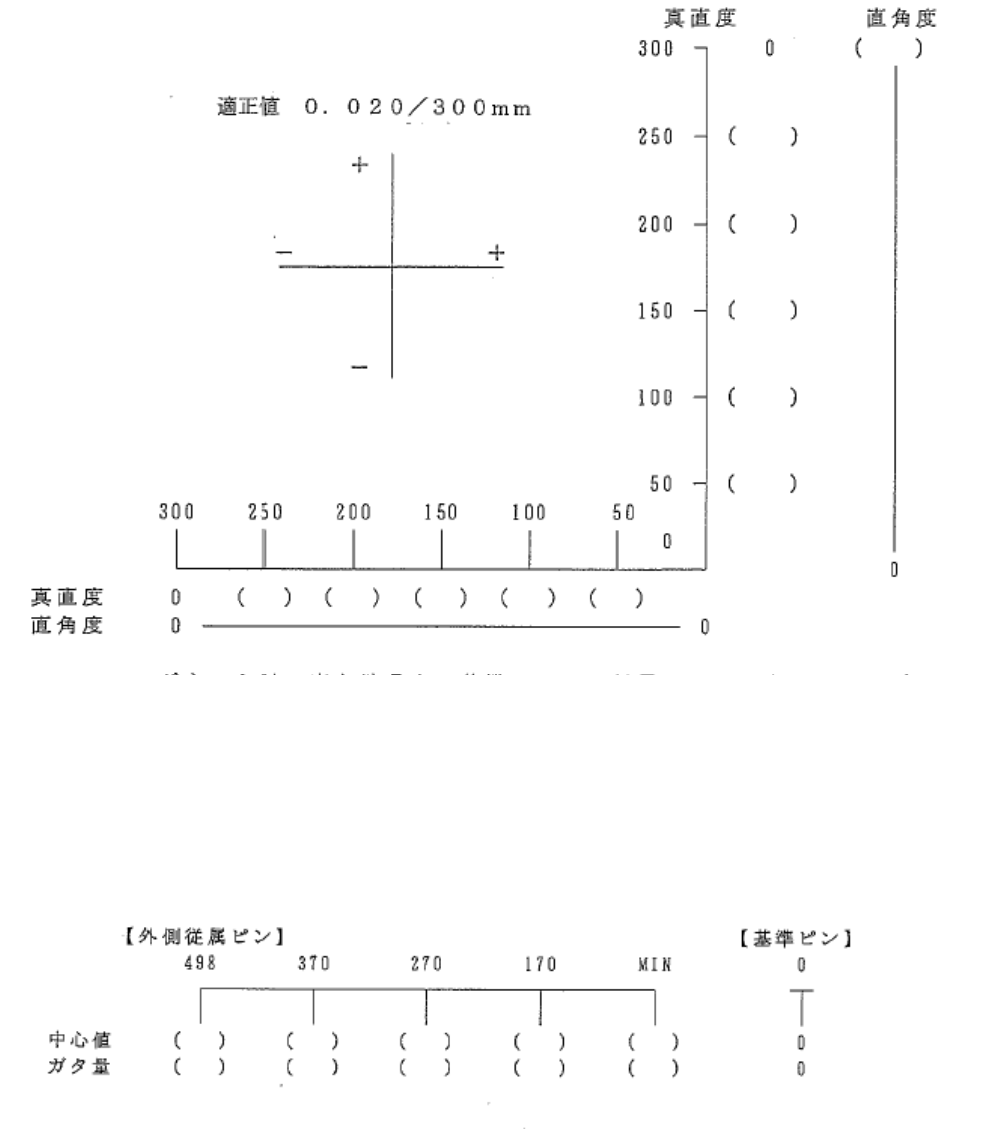
3. 6 X Ytable h 垂直度,直角度测定确认
.带磁铁的直角治具,基准轨道,从属轨道的上面、千分表在 X 方向的 0.300mm 的位置设置 0、测定垂直度。
测定完 Y 方向的直角度之后,再测 Y 方向的垂直度。
3.7 测定基准 PIN 和从属 PIN 的平行度
13
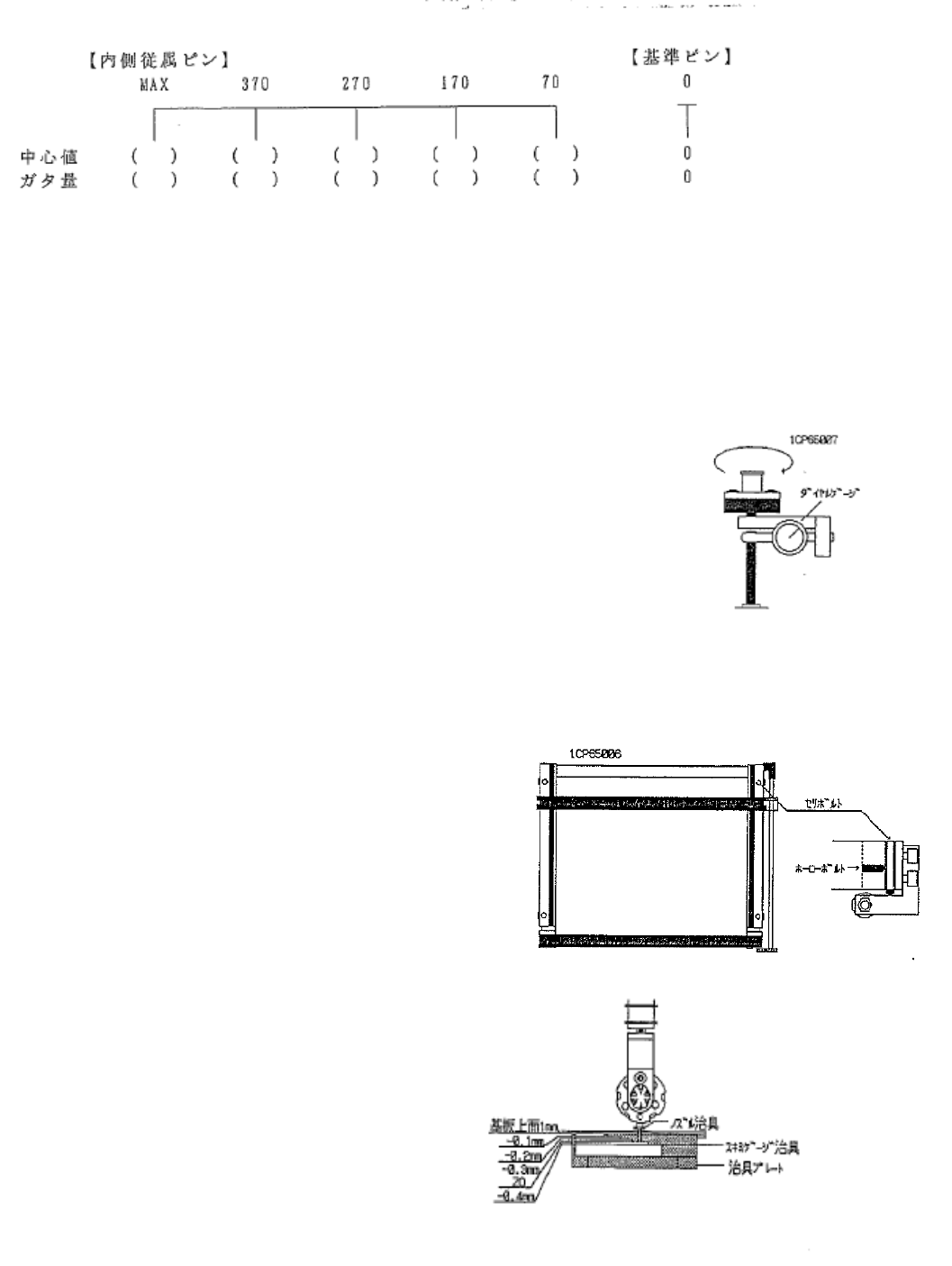
对于基准 PIN 从属 PIN 的平行度、测定从属 PIN 的间隙的中心值和间隙量。
确认 Pin 间距在 499mm 以上
适正值 中心值 ±0.020mm 以下
间隙量 0.040mm 以下
3.8 Xo Yo 测定
.X 轴和 Y 轴 zero 设定。(servo counter 0)
. 拆下支持轴 A 以及、pin holder 的 盖子、安装治具。(弹簧也取下)
.CAM 角度 200 度,在支持轴安装治具的下面安装 PIN Holder 治具,
在 INCHING 上 移动 X Y table。
.转动千分表测试安装的 HOLDER、确认位置。(千分表的变化量±0.01 以内)
.这时的 X 轴、Y 轴的 Servo counter 是 X0、Y0。
如果 Pin holder 处带着安装治具做 0 设定的话 Conveyor
和治具之间有冲突,所以必须 0 设定后再安装治具。
14
3.9 X Y guide rail 安装精度确认
① 测定 Guide rail 的高度以及平行度。
. Z 轴 0 设定、Servo Counter 设置 940 (-940pulse).
在这个状态上确认 Clamp。同时在基板宽 50mm、250mm、
457mm 的 Guide rail 上用千分表测量从属轨道
以及基准 Guide Gear 的平行度。(最大偏差 0.2mm)
② Z 0 测定
.CAM 角度 O 度,11st 的 Solenoid valve 设置 ON.
OUT-Y028 PLACE SOL ON
(ST11 贴装 Stopper 用 Solenoid OFF 指示)