CP-65(E)第1調整検査手順書第7版..pdf - 第24页
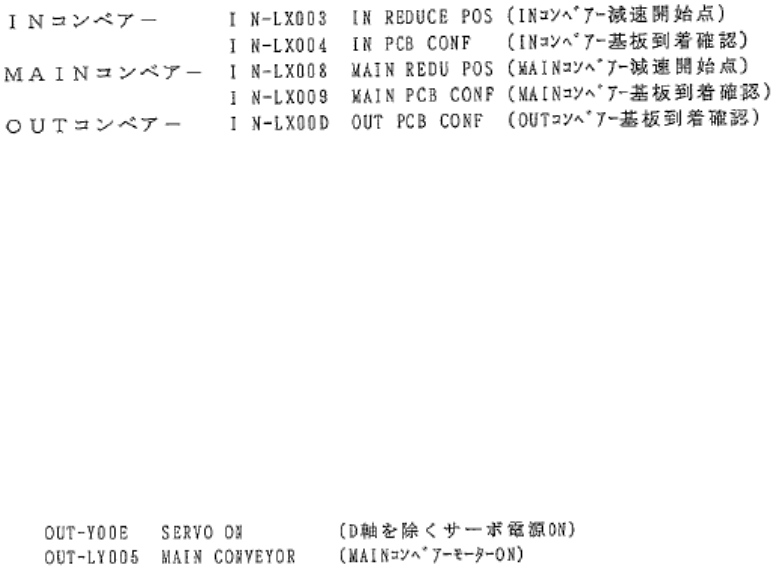
24 .基板单元确认 s ensor 是基准 PIN 以及附属 PIN 引进 1~~1 .5mm 上调整 OFF. (SENS OR 的 Volume 是 MAX) IN – X033 PCB S ET OK .确认有无 PCB 板 Sensor 是 Clamp Fuji 基板 X(-3000)Y(49200)、在 Z0 的位置时确认 PCB 的反应。 .机器仅对应正反流向,请变更 IN Conveyer 基板到后确认 Sens or …
4. 6 各 Sensor 调整
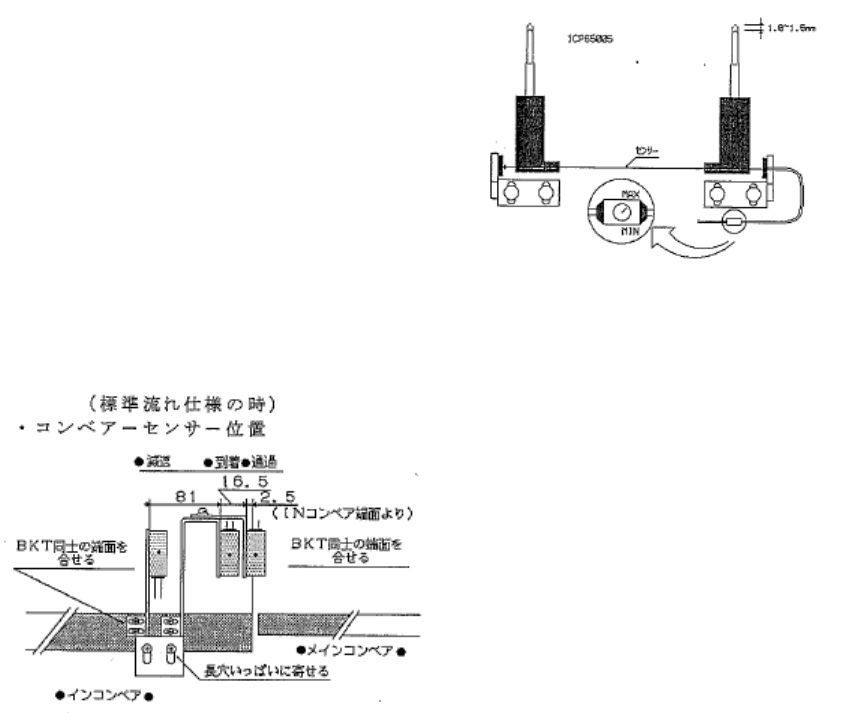
.在 I/O 上确认 IN 、Main 以及 OUT Conveyer 的各连接 Sensor 对 PCB 的反应。
.确认各 Sensor 安装 BKT 无倾斜。
.临时将 Speed controller 的 Volume 定在 30。
.确认 IN Conveyer、MAIN Conveyer 的各 Stopper cylinder Sensor 上升端、下降端的反应、在最小宽度时
和 Sensor 是否产生干涉。
(Cylinder 的 Magneto sensor 是先 ON、再 OFF、再次 ON、设置在 0.5mm。
.在 Loading position 处 X Y Table 上升、IN 与 MAIN 间、MAIN 与 OUT 之间用塞规进行调整 Check Sensor。
.调整 MAIN Conveyer 驱动齿轮。
驱动齿轮(马达一面)和可动齿轮(table 一面)啮合、驱动齿轮下降。(下降过很的话 table 也下降)
在 I/O 上 MAIN Conveyer 搬运马达 ON 驱动齿轮旋转。
(注意因在 I/O 上 servo 未在 ON 的话马达不动作)
接着、将驱动齿轮脱离 Adjust bolt、旋转燥音从原来减弱一半。
.调整 Y Table 的上升、下降 Sensor
《上升端》 .在 Solenoid valve Cylinder 上升状态上,上升 Sensor OFF,从再次 ON 后 1mm 内侧的位
置上固定 Sensor。
《下降端》 .Z 轴在最高的位置上在 Table 下降的状态 上、Dog 在 Sensor ON 极限的位置上固定。
*为早点将 Sensor ON 的话、切断 Air Table 会掉下,尽量推迟时间。
23
24
.基板单元确认 sensor 是基准 PIN 以及附属
PIN 引进 1~~1.5mm 上调整 OFF.
(SENSOR 的 Volume 是 MAX)
IN – X033 PCB SET OK
.确认有无 PCB 板 Sensor 是 Clamp Fuji 基板
X(-3000)Y(49200)、在 Z0 的位置时确认 PCB 的反应。
.机器仅对应正反流向,请变更 IN Conveyer 基板到后确认 Sensor 的 timer volume 设定 0.1s→0.325s。
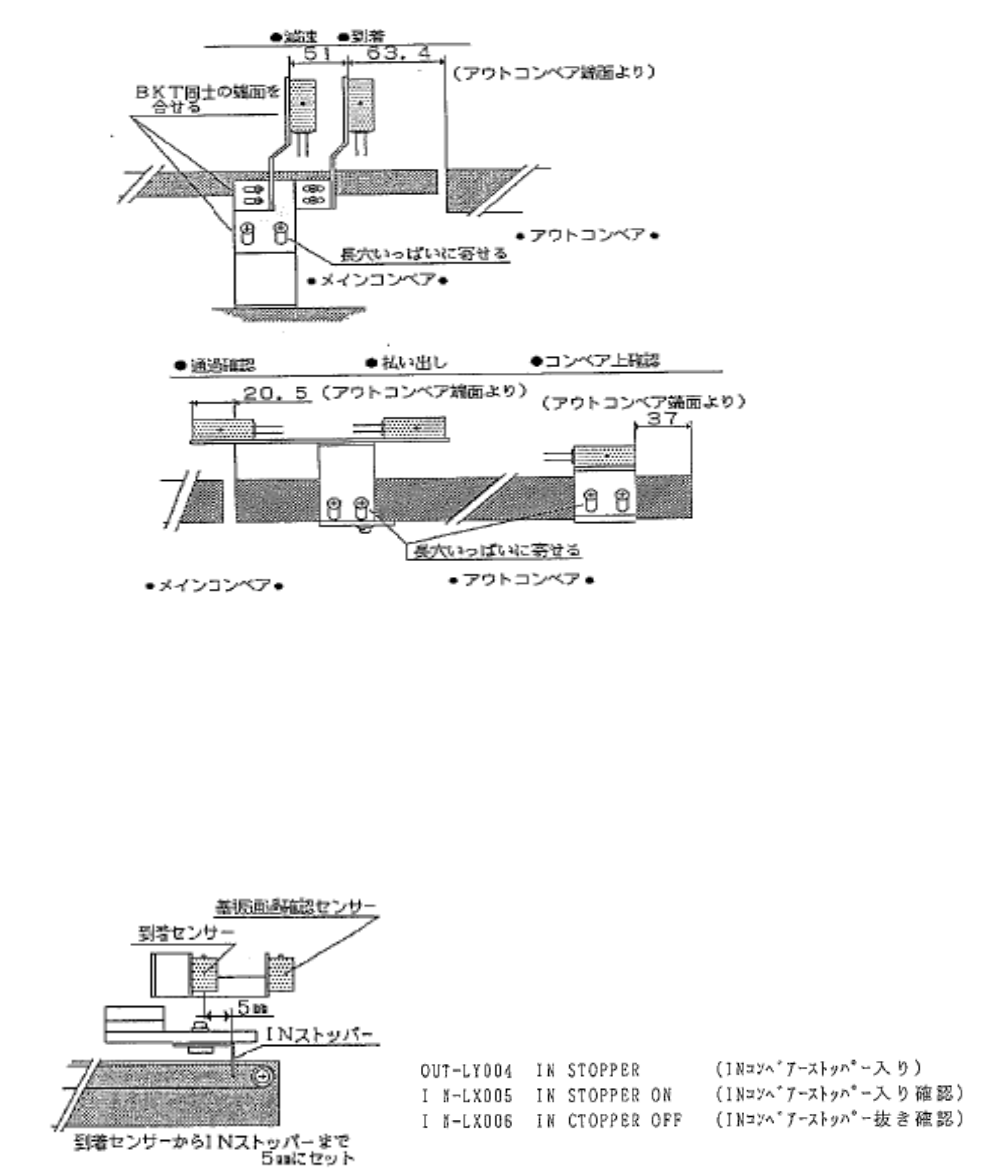
4. 7 IN Stopper、MAIN Stopper 调整
.IN Stopper 是 IN Conveyer 的基板到达传感器从 ON 约 5mm 的位置 Set。
.在 I/O 模式上、使 IN Stopper ON/OFF、调整 Air Cylinder 的 Speed。
.Air Cylinder 的 Magneto Sensor 固定的位置在、上升、下降端一同从 OFF 到 ON 0.5mm~1.0mm 的地方。
.MAIN Stopper 固定位置是 基板 PIN Clamp 由基板端面 0.2~0.3mm 的间隙处。
.Speed 以及 Sensor 与 IN 同样吻合。
25