CP-65(E)第1調整検査手順書第7版..pdf - 第7页
2. 11 CAM 轴原点 Dog 调整 ·CAM 角度在 0 度上,dog 和 sensor 的中心一致 决定 dog 锁紧 bolt 位置。(0±1 度以内) I N-XO3E CAM Z ERO POS (CAM 原位置) ·旁边 Dog 的增加锁紧确认。 2. 12 CAM Lever 以及 Solenoi d 铭板确认 ·各铭板和 CAM Lever 以及 Solenoid 一致。 ·在指定位置涂 Grease、贴付遮光纸。 …
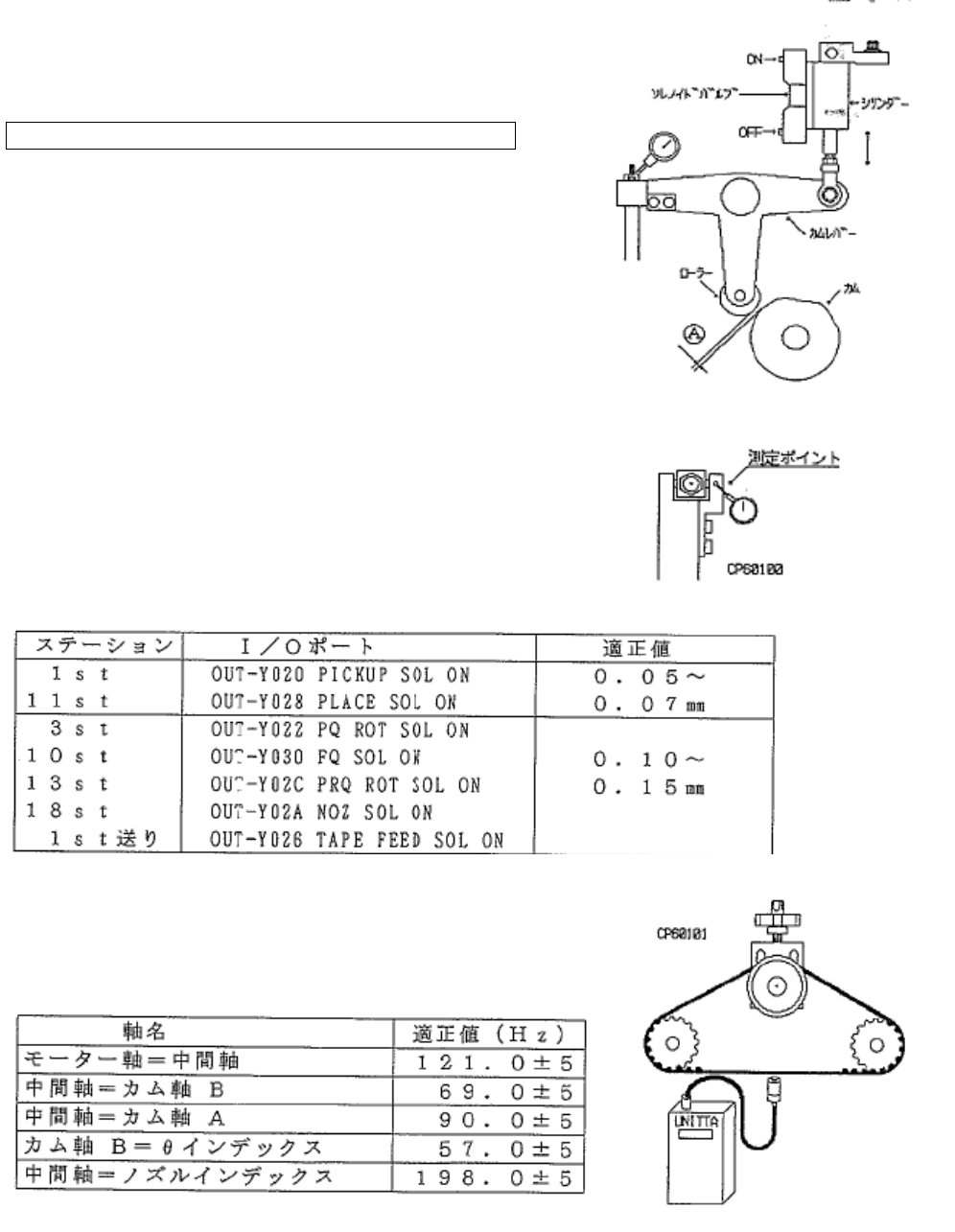
2. 9 各 CAM lever stoppery 调整
·1ST, 3ST,10ST,11ST,13ST,18ST,CAM Lever 停止用 Stoppery 调整。
·在 CAM 角度 0 度上、调整 Station 的 Solenoid valve 为 ON.
( solenoid valve 是 ON 的话,CAM 和 Roller 接触,OFF 的话脱离)
但是调整轴以外的东西时,Solenoid valve 必需在 OFF 上
·在 CAM Lever 上架上千分表。
·Solenoid valve 在 OFF 上时,千分表的值在以下的范围内
调整 Air Cylinder Stroke.
6
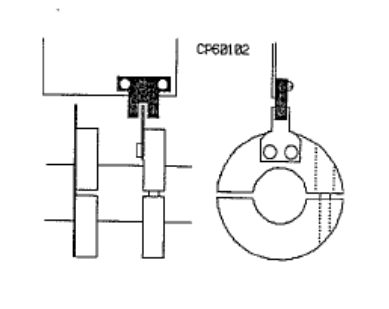
2. 10.CAM 轴 Timing belt Station 测定
·CAM 角度 0 度上,使用张力计(CLAVIS 制)
用张力计在皮带轮未使用的一面、在皮带中央处,进行测定调整。
2. 11 CAM 轴原点 Dog 调整
·CAM 角度在 0 度上,dog 和 sensor 的中心一致
决定 dog 锁紧 bolt 位置。(0±1 度以内)
I N-XO3E CAM ZERO POS (CAM 原位置)
·旁边 Dog 的增加锁紧确认。
2. 12 CAM Lever 以及 Solenoid 铭板确认
·各铭板和 CAM Lever 以及 Solenoid 一致。
·在指定位置涂 Grease、贴付遮光纸。
(贴付各 seal 时参考治具架上的写真)
2. 13 机器 Valve spool 动作确认
·用手确认可以有节奏的替换。
2. 14 CAM BOX 清扫、锈、给油确认
·发生生锈必需处理,给油。
(注意 CAM BOX 上 面未涂装部)
2. 15 CAM BOX 内各部增加锁紧确认。
7
第 3 章 X、Y、Z、D 轴调整
3. 1 各轴干涉确认
·取下各轴的 coupling、timing belt,确认手动 full stroke 移动无干涉。.
·X 轴 Cable Bearing 和 stainless 板的干涉
·Y 轴 Cable Bearing Cover 和 Z 轴 Cylinder 用 Air hose 类的干涉
·ETC 确认
3. 1.1 Servo Amplifier parameter 设定确认
·电气预设定伺服放大器 Parameter 有没有错误。
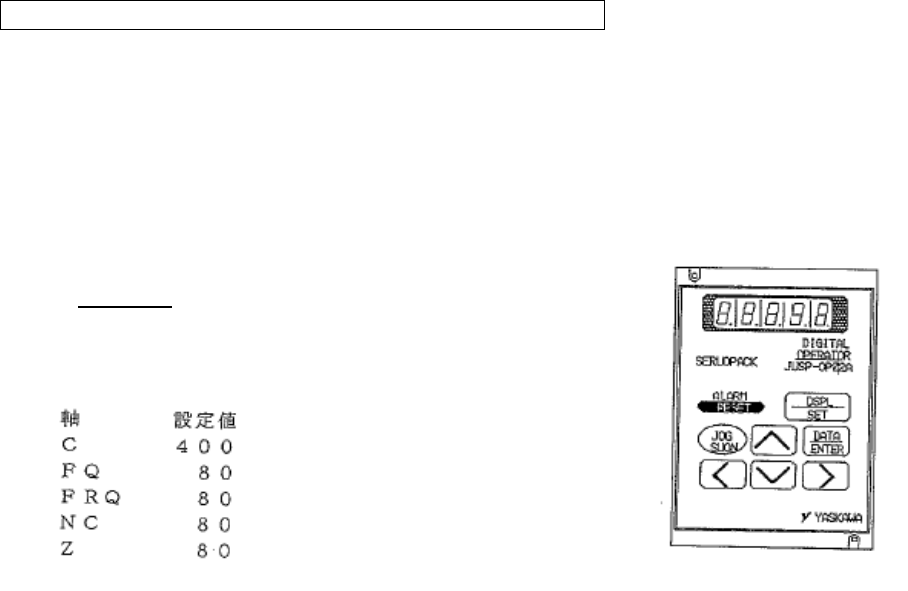
·因各轴(C、FQ、FRQ、NC、Z)timing belt 在张力前和张力后的参数不同(CN-04),进行最终的参数确认。
【数字机操作方法】
① Servo Amplifier 与数字操作机的接续。
② 按几回
DISP/SET 键显示Cn-00
按 4 回▽键选择 Cn-04
③ 按 DATA/ENTEE 键确认被显示的值和设定的值是否一致 。
·在电气上设定 Servo parameter 的值(Cn-04)是通过如下。
8