SIPLACE S-23 HM.pdf - 第26页
1 Introduction, technical data User M anual SIPLACE S -23 HM 1.5 Description of the machine Software Version SR .406.xx 02/00 US Edition 26 The conc ept behin d the au tomati c placem ent sys tem 1 – with i ts stationary…
User Manual SIPLACE S-23 HM 1 Introduction, technical data
Software Version SR.406.xx 02/00 US Edition 1.5 Description of the machine
25
1.5 Description of the machine
1.5.1 Functional description
The automatic placement system is a high-performance placement system with two gantrY-axis
systems. A PCB vision system and a star-shaped 12-segment revolver head are mounted on each
gantry. Revolver placement heads equipped with a component vision system pick up the compo-
nents from stationary feeder modules and place them onto the PCB clamped in the PCB con-
veyor. 1
1
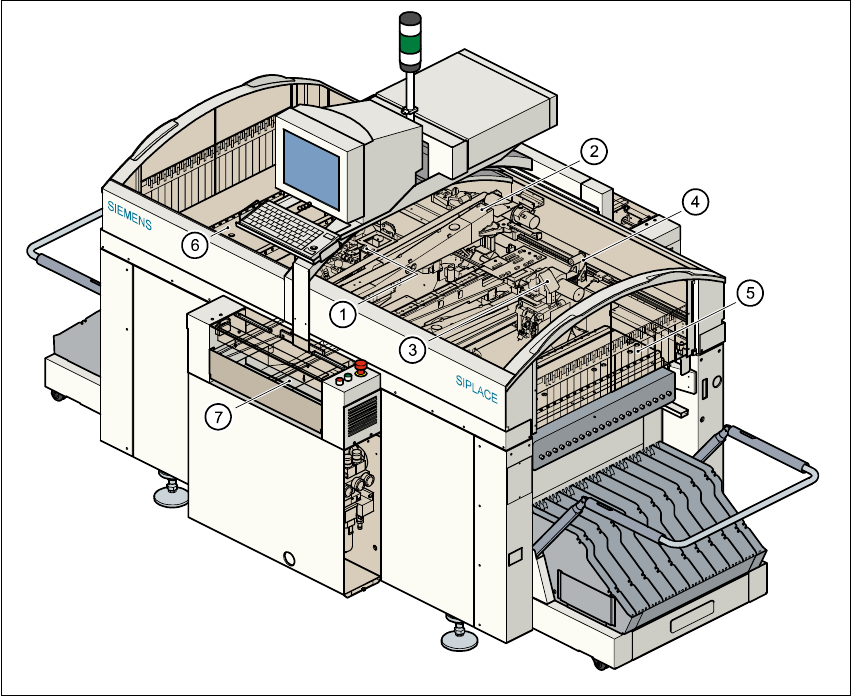
Fig. 1.5 - 1 Functional description of the placement system
(1) 12-segment revolver head /DLM1 with component vision module (gantry 1)
(2) Gantry 1 with PCB vision module
(3) 12-segment revolver head /DLM1 with component vision module (gantry 2)
(4) Gantry 2 with PCB vision module
(5) Stationary component supply (location 1)
(6) Stationary component supply (location 3)
(7) PCB conveyor (dual conveyor option)

1 Introduction, technical data User Manual SIPLACE S-23 HM
1.5 Description of the machine Software Version SR.406.xx 02/00 US Edition
26
The concept behind the automatic placement system 1
– with its stationary feeder modules,
– PCBs that do not move during placement
– and positionable placement heads
has a number of significant benefits: 1
– For example, the flexible 12-segment revolver heads combined with automatic nozzle chang-
ers enable the nozzle configuration to be changed temporarily and automatically adapted to
receive different component sizes. You can also optimize the traversing paths and the place-
ment sequence.
– With stationary feeder modules, even the tiniest components are picked up reliably.
– The components cannot slip on the PCB during placement (as is often the case with moving
PCBs) since the PCB does not move.
– Sophisticated optical centering systems (vision systems) for components and PCBs also en-
sure high component positioning accuracy.
– Components can be topped up and tapes can be spliced without stopping the machine.
– Prepared component tables enable the placement system to be retooled without long stop-
pages.
1.5.2 Head Modularity concept (HM)
The abbreviation HM in the designation of the SIPLACE S-23 HM placement system stands for
Head Modularity. 1
The aim of this concept is to allow any combination of 6-nozzle and 12-nozzle revolver heads to
be used on the placement system. A simple head change procedure will enable the system to be
quickly adapted to the requirements of individual placement jobs. 1
The head modularity concept will be implemented in the next development stage. Placement sys-
tems supplied with the designation HM are designed to be compatible with the new concept. 1
User Manual SIPLACE S-23 HM 1 Introduction, technical data
Software Version SR.406.xx 02/00 US Edition 1.5 Description of the machine
27
1.5.3 Technical data - machine overview
* The SIPLACE S-23 HM can be equipped to place 0201 components.
(Please contact the factory for details).
Procedure Collect&place
Range of components From 0402 (0201 *) to 18.7 mm x 18.7 mm
Maximum placement speed of the12-seg-
ment revolver head (DLM1)
23,000 components/hour
Cycle time at the revolver head 125 ms, regardless of the type of component
Angular accuracy
Placement accuracy
± 0.525°/ 3 σ, ± 0.70°/ 4 σ, ± 1.05°/ 6 σ
± 67.5µm / 3 σ, 90µm / 4 σ, 135µm / 6 σ
PCB format 50mm x 50mm to 460mm x 460mm
(optionally 460mm x 508mm,18" x 20")
Feeder capacity 40 locations for feeders
Types of feeder Component tapes, stick magazines, bulk cases
Operating system Microsoft Windows NT / RMOS
Combination options Inline or stand-alone
Space required 4 m² / module