SP18 程序手册.pdf - 第52页
SP18P-L 程序手册 1.5 生产数据的编制 Pa ge 1- 14 2. 基板识别数据的 编辑 ∗ 功能软开关的基板识别 在 OFF 时不能进行编辑。 1. 点击主菜单上的 [BoardRecog Data] ( 基板 识别数据 ) 。 • 将显示 <BoardD ata> ( 基板数据 ) 窗口的 <BoardR ecogData> ( 基板识别数据 ) 表。 2. 输入基板识别 A 点的坐标。 3. 点…
SP18P-L
程序手册
1.5
生产数据的编制
Page 1-13
1.5.2
基板识别数据
1.
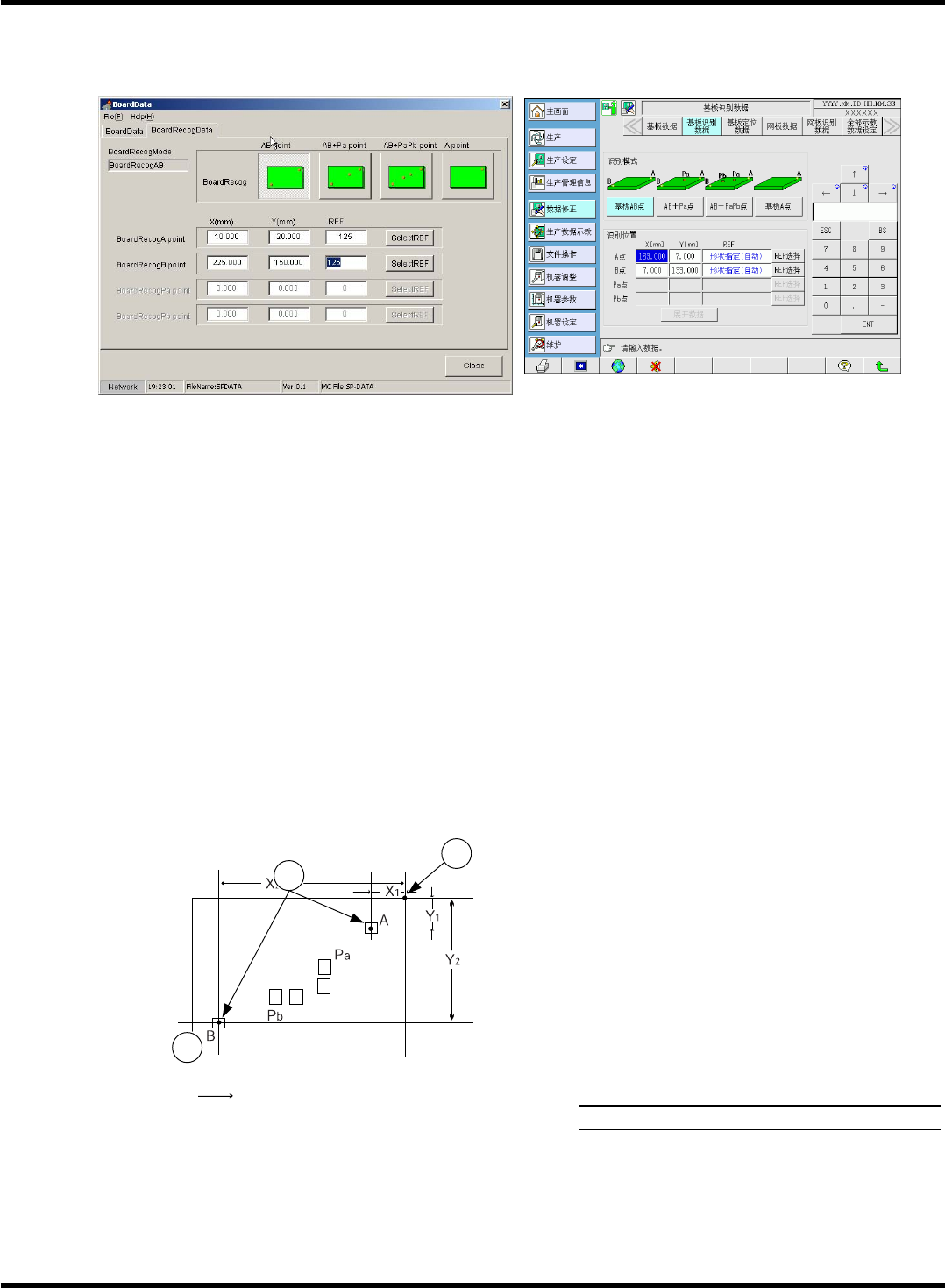
关于基板识别数据
1.
基板识别模式
•
基板识别
AB
点
:
进行每个基板的
A, B
点的识别。进行从二点求得的偏移量
∆
x,
∆
y,
∆
θ
的补正。
•
基板识别
AB
+
Pa
点
:
进行每个基板的
A, B
点和图案的
1
点
(Pa)
识别。
•
基板识别
AB
+
PaPb
点
:
进行每个基板的
A, B
点和图案的
2
点
(PaPb)
识别。要重点补正针对
特定的间距图案进行补正时,使用此模式。进行从
A, B
点
→
∆
θ
、
θ
方向的补正。
Pa (Pb)
点
→
∆
x,
∆
y
、
x, y
方向的补正。
周围
5 mm
以内有同一图案时不能使用。
•
基板识别
A
点
:
仅进行每个基板的
A
点的识别。仅进行
A
点的偏移量
∆
x,
∆
y
的补正,不
进行
∆
θ
的补正。在不需要进行
θ
的补正时和生产节拍加快时有效。
2.
基板识别点
A)
识别点坐标
(X, Y)
输入从坐标原点到基板识别标记的尺寸
(X, Y)
。
例
)
右上基准时
•
基板识别
A
点的坐标
(X
1
, Y
1
)
•
基板识别
B
点的坐标
(X
2
, Y
2
)
∗
请选择基板上的
2
个标记作为识别点
A, B
。但,
请尽量选择对角上的分离的
2
点做
A, B
点。
说明
基板识别标记
原点
(0, 0)
基板的流向
B) REF
选择识别方法。
基板识别基本上推荐形状指定识别
(REF = 125)
。
EJP1A-Pt-0006
EJP1A-Dm-0002
EJP1A-606E
1
2
3
EJP1A-C-PMA01-A02-00
从
QFP
图案不能选择
Pa
、
Pb
。
(
因为附近有同一图案。
)
SP18P-L
程序手册
1.5
生产数据的编制
Page 1-14
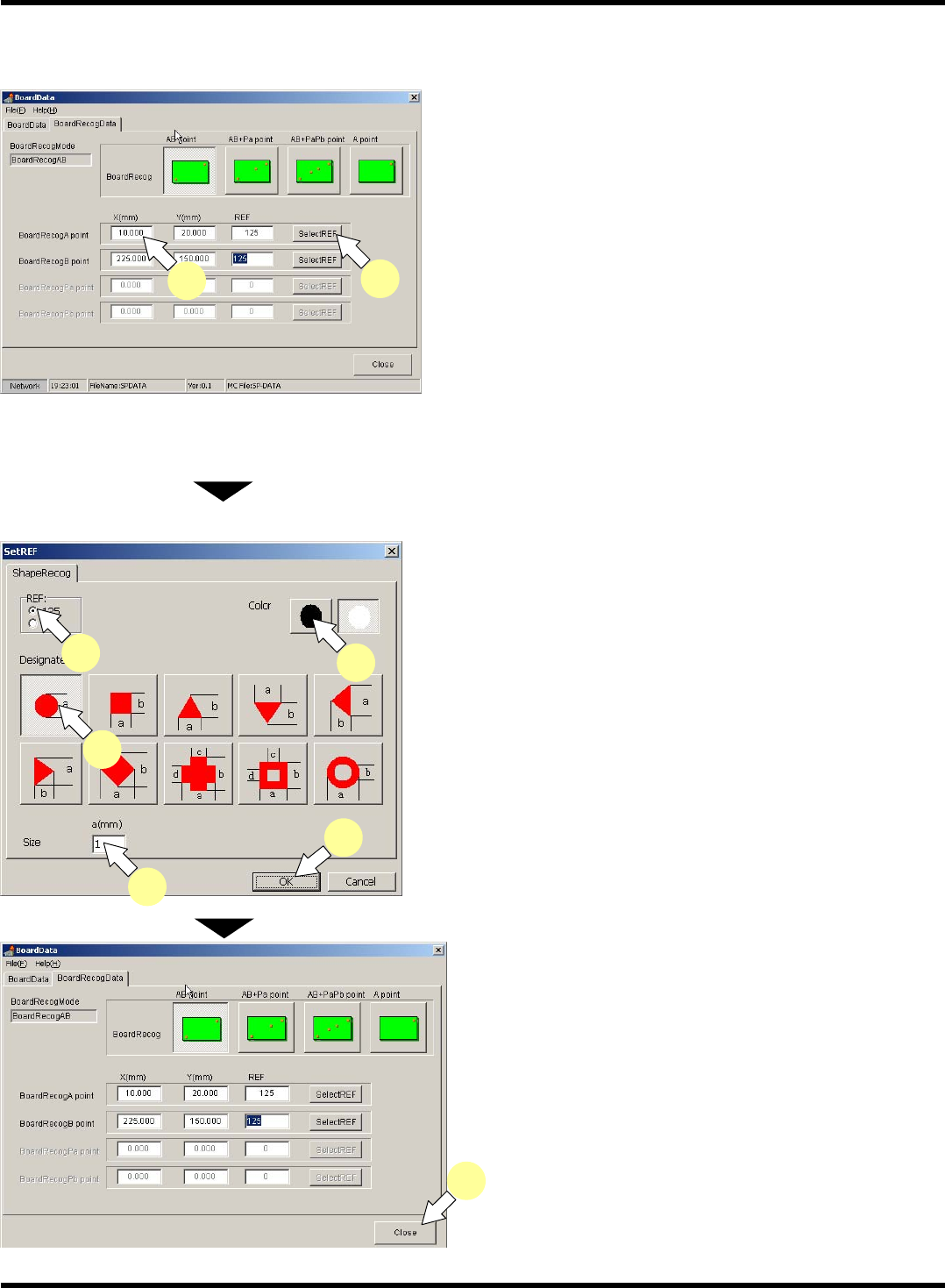
2.
基板识别数据的编辑
∗
功能软开关的基板识别在
OFF
时不能进行编辑。
1.
点击主菜单上的
[BoardRecogData] (
基板
识别数据
)
。
•
将显示
<BoardData> (
基板数据
)
窗口的
<BoardRecogData> (
基板识别数据
)
表。
2.
输入基板识别
A
点的坐标。
3.
点击
[SelectREF] (REF
选择
)
。
•
使用本机的接触面板操作时,将显示
<SetREF>
(REF
设定
)
窗口。
125
: 形状指定
(
自动
)
→
第一次进行基板识别时,系
统将会自动调整照明值。
126
:
形状指定
(
手动
)
→
用基板识别示教来指定照
明值。
47
∼
51
:
1
点区块
→
不按照标记而按照图象的匹配来
进行识别。不能使用整体示教。
4.
选择
REF
、形状、颜色,输入尺寸,点击
[OK]
。
•
<SetREF> (REF
设定
)
窗口关闭,
将显示
<BoardRecogData> (
基板识别数据
)
表。
5.
重复步骤
2. ~ 4.
输入
B
点的数据。
∗
选择
AB
+
Pa, AB
+
PaPb
时,
也请以同样方式输入
Pa, Pb
。
6.
点击
[Close] (
关闭
)
。
•
将返回主菜单。
EJP1A-C-PMA01-A02-01
EJP1A-Pt-0006
2
3
EJP1A-Pt-0021
4
4
4
4
4
EJP1A-Pt-0006
6
SP18P-L
程序手册
1.5
生产数据的编制
Page 1-15
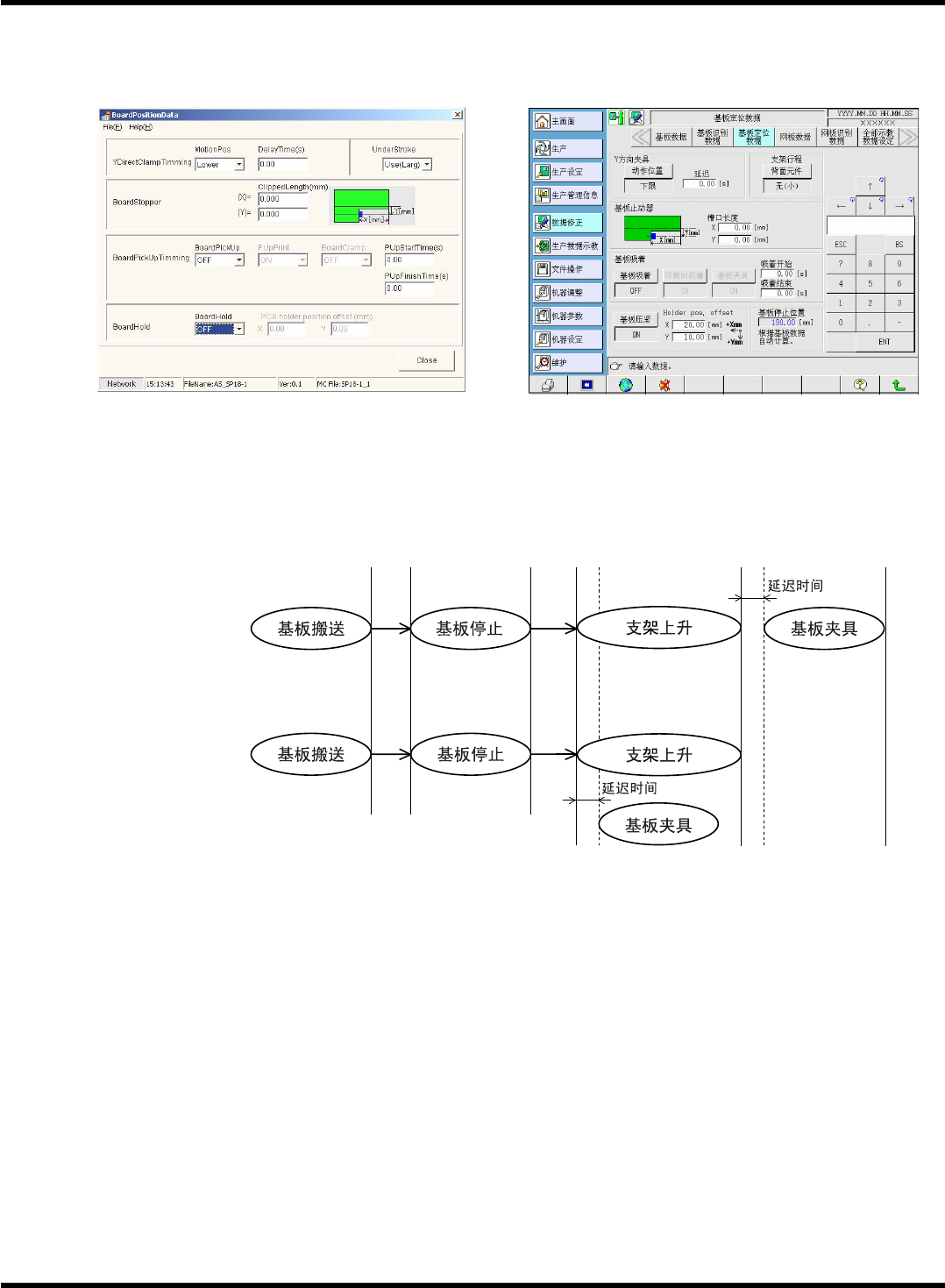
1.5.3
基板定位数据
1.
关于基板定位数据
1. Y
方向夹具动作时限
设定基板固定时的支架和夹具的动作时限。在默认状态下,为
“Lower” (
下限
)
。
(
共用其他生产数据
时除外。
)
支架上限
支架下限
支架上限
:
支撑块上升到上限后,经过已设定的
“Delaytime” (
延迟时间
)
后,开始上基板夹具。
基板材质为陶瓷,铁等材料时也具有良好的效果。
支架下限
:
支撑块上升开始后,经过已设定的
“Delaytime” (
延迟时间
)
后,开始上基板夹具。
基板材质为玻璃环氧、纸苯酚等材料时也具有良好效果。
2.
支架行程
设定基板搬送中的支架的待机位置
(
高度
)
。
通常以
“Unuse(Small)” (
无
(
小
))
使用。搬送反面实装完了的基板,并且该元件的高度在
10 mm
以
上时,请设定为
“Use(Larg)” (
有
(
大
))
。此时,在支架下降到最下限度的状态下搬送基板。
EJP1A-Pt-0025
EJP1A-Dm-0030
1D3C-665C
EJP1A-C-PMA01-A02-01