SP18 程序手册.pdf - 第98页
SP18P-L 程序手册 3.1 识别方式概要 Page 3-2 3. 3.1 识别方式概要 3.1.1 识别方式的种类 名称 参考 特征 对象 1) 事先进行主图像的示教,识别距该主图像的偏移量。 2) 需事先进行主图像的示教。 1 1 点区块匹配 47 ~ 50 ( 除上述以外 ) 3) 以 1 个区块的主图像为基础,求出位置偏移 (XY 坐标 ) 。 不求倾斜度。 基板识别标记 1) 以轮廓的特征点为基础求出位置偏移 (XY 坐标…
SP18P-L
程序手册
Page 3-1
3.
3.
识别装置
(HGR15)
在本章中对识别装置的元件识别数据编制方法以及错误信息、维护步骤等进行了说明。
EJP1A-C-PMA03-A00-00
SP18P-L
程序手册
3.1
识别方式概要
Page 3-2
3.
3.1
识别方式概要
3.1.1
识别方式的种类
名称
参考
特征
对象
1)
事先进行主图像的示教,识别距该主图像的偏移量。
2)
需事先进行主图像的示教。
1
1
点区块匹配
47 ~ 50
(
除上述以外
)
3)
以
1
个区块的主图像为基础,求出位置偏移
(XY
坐标
)
。
不求倾斜度。
基板识别标记
1)
以轮廓的特征点为基础求出位置偏移
(XY
坐标
)
点的倾斜
度。
2)
不需事先进行主图像的示教。
3)
决定每次参照的对象形状。
2
轮廓识别
51 ~ 250
4)
识别不良时,可根据代码分析其不良原因。
网板识别·焊接识
别等
1)
指定形状、尺寸、颜色
(
白
/
黒
)
、识别标记。
3
形状指定识别
125, 126
2)
无需示教。
基板识别标志
表
.1-1
识别方式
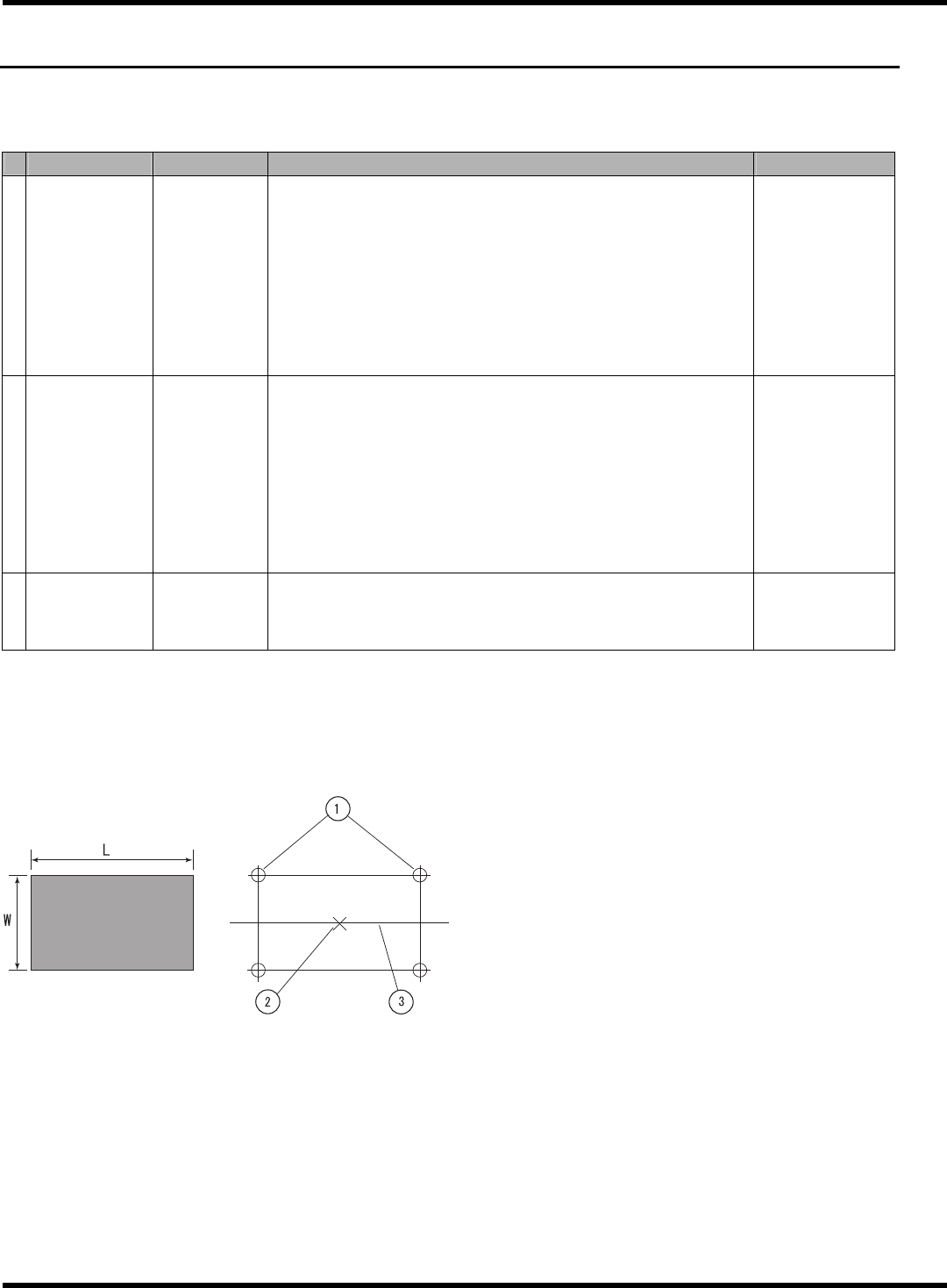
轮廓识别的特征
∗
以元件形状固有的
特征点
(
角、销等
)
为基础
进行识别。图
.1-1
显示矩形
(
角芯片
)
固有的特
征点,以此
4
点
(
或
3
点
)
的信息求出
芯片中
心·
倾斜度。
∗
可根据芯片数据的
L (
长
)
·
W (
宽
)
·
P (
间距
)
等进行优良品的判定。判断标准根据参照而定。
请参阅
“3.3
各种形状输入数据项目
”
。
EJP1A-C-PMA03-A01-00
1D3C-601E
图
.1-1
轮廓识别的特征
SP18P-L
程序手册
3.2
编制轮廓识别数据
Page 3-3
3.2
编制轮廓识别数据
3.2.1
轮廓识别形状一览
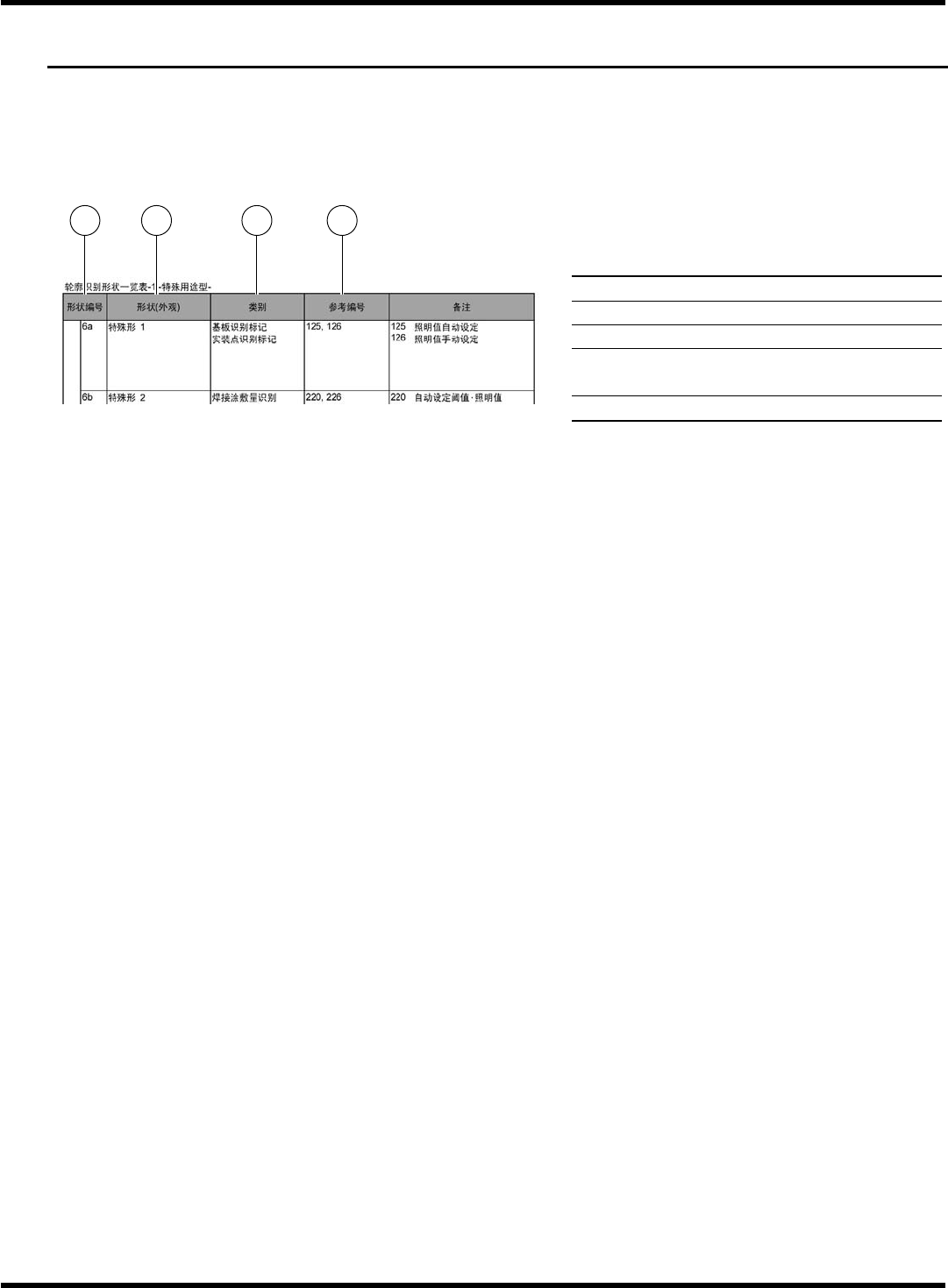
轮廓识别的参考编号根据形状而定。请参阅各形状对应的个别项目。轮廓识别形状一览表的构成如
图
2-1
所示。
说明
记载形状编号。
记载对象的外形形状。
记载对应此形状的元件芯片数据程序库的
类别。注
1
记载相应的参考编号。
注
1:
因
“
类别
”
为标准示例,故存在由于形状特殊而不能进行识别的元件和属于其它形状可进行识
别的元件。
图
2-1
轮廓识别形状一览表的参照示例
EJP1A-C-PMA03-A01-00
1D3C-601P
1
2
3
4