三星SM421 Introduction硬件装机手册_.pdf - 第29页
xvii MMI (Man-Machine Interface) 可以让 人与 机 械一 起作 业 的系统 。可 以更 简 单的 操作 方式 向机 械 下达 指令 ,是 一种可以控制设备的软件程序。 FOV (Field Of V iew) 是指 Vision 显示器 ( 或 SM Visio n Window ) 上 显示的影象 , 一般以影象的宽度 为基准区分 FOV 。例如, ’ FOV 16mm ’ 是指影象的实际宽…
Samsung Component Placer SM421 Introduction
xvi
微晶片(Micro Chip)
像 0402, 0603 晶片元件一样尺寸很小的晶片元件。
节距(Pitch)
以一定规则互相对应的两个位置之间的间隔。
Timing Belt
这是一条连接电动机的驱动轴与实际驱动对象驱动轴的橡胶带(belt),具有兼顾
了两轴之间驱动比的齿轮比,可以准确地控制驱动。
Twin Servo System
是指为了提高Y轴的驱动速度,把Y轴驱动引擎安装于两侧的Y轴机架上,利用
2个伺服电动机驱动Y轴的方式。因此,设备安装或移动后必须执行Skew Comp
ensation。详细事项请参照” 7 . “的”Skew执行阶段”
AC Servo Motor
由AC(交流)电源驱动的电动机,为了实现精密驱动控制而配置了编码器(Encode
r)。编码器安装在电动机驱动轴,以脉冲方式把电动机轴的移动传输到电动机
的控制装置上,使其获得补偿信息以便让电动机的输入与输出相同。
Fiducial Mark
利用Fiducial Camera识别PCB上的Fiducial Mark后,参考所识别的Fiducial Mark
信息,校正PCB的贴装点。有Circle、Diamond、Rectangle、Rectangle2、Triang
le, Cross 及 Butterfly 等形状。
R-Axis Timing Belt
Z-Axis Timing Belt
xvii
MMI (Man-Machine Interface)
可以让人与机械一起作业的系统。可以更简单的操作方式向机械下达指令,是
一种可以控制设备的软件程序。
FOV (Field Of View)
是指Vision显示器(或SM Vision Window)上显示的影象,一般以影象的宽度
为基准区分FOV。例如,’FOV 16mm’是指影象的实际宽度为16mm。
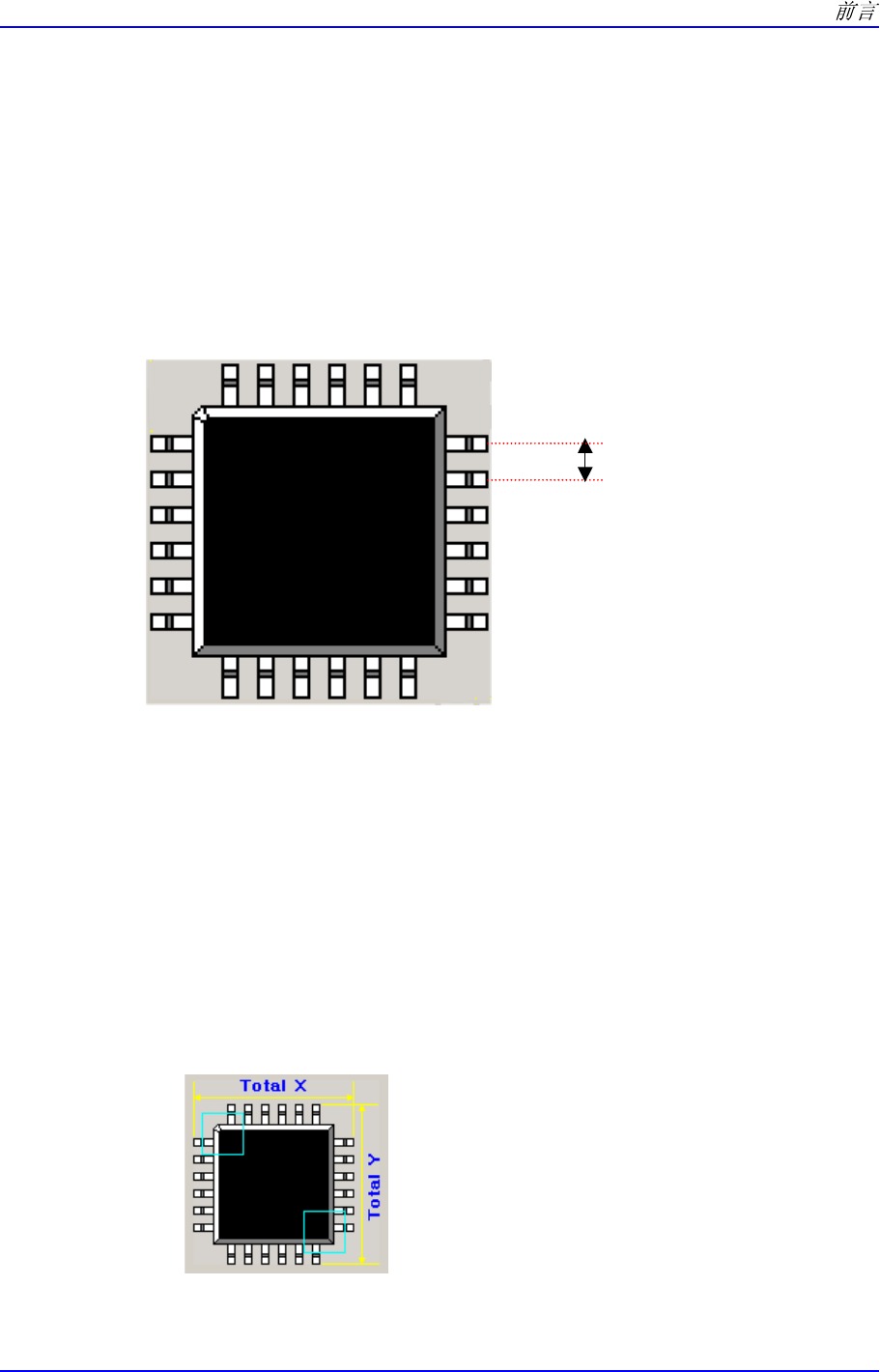
Lead Pitch
元件具备引脚(Lead)时的引脚间隔。
Stage Vision识别
使用(固定相机)Stage Camera识别元件的形状。
Option
采购设备时,可以根据使用者的需要而选择的项目。
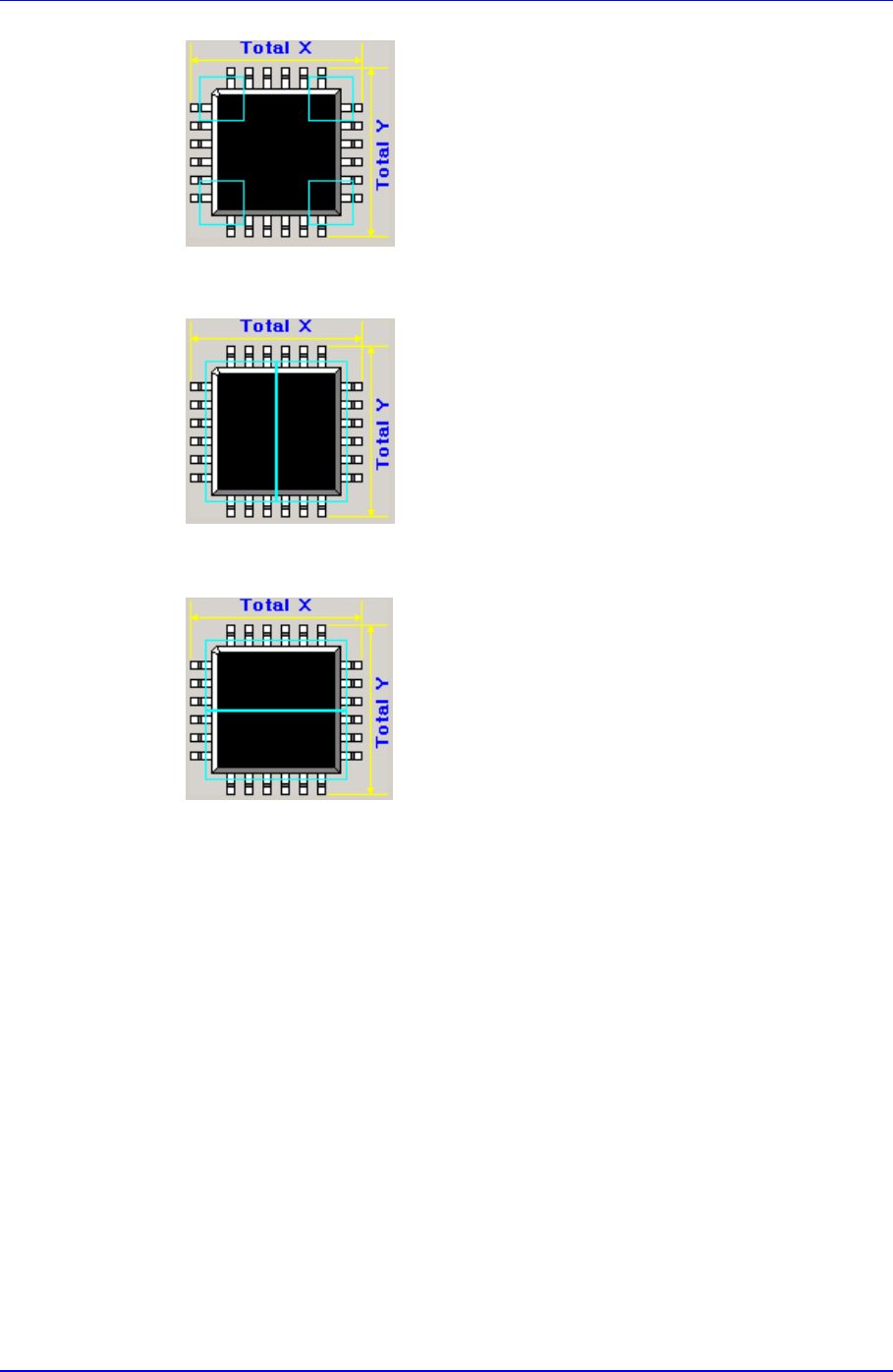
分割识别 (MFOV - Multi Field Of View)
如果部件影象超出Upward Camera所示范围,则无法一次识别部件。为了解决
该问题,把部件的影象分割成2个以上区域进行识别,把它叫做”分割识别”。
MFOV(分割识别)可分为4种,各自如下。
Cross 2P: 使用于QFP, PLCC种类,Cross 方向检查2次。
Cross 4P: 使用于QFP, PLCC种类,Double Cross 方向检查4次。
Lead Pitch
Samsung Component Placer SM421 Introduction
xviii
Linear H: 使用于连接器种类,顺着纵横方向上(下)左(右)检查两次。
Linear V: 使用于连接器种类,顺着垂直方向上面和下面检查2次。
IPC 基准
是指IPC(国际电路连接及组织协会)规定的基准,本说明书里指测定贴装速
度的条件。
CPH (Component Per Hour)
是指每单位时间内贴装的部件数。
Conveyor Regulator
该装置可以对提供给传输道轨的气压装置的整体气压进行设置。