SM471_Administrators_Guide(Chi_Ver1).pdf - 第291页
11-9 Production Setup 注 意 本功能可单纯地继续贴装作业, 但是由于部件消尽对跳越 的部件 在此后的作业中预想到与已贴装 的部件发生干涉, 请解除 本功能 进行使用。 <FIFO Board Processing> 复选框 在双轨道 (Lane) 传送轨道上先进行作业 的 PCB 没有完成作 业之前, 不得开始 进行其它轨道 (Lane) 的 PCB 作业。 该功能可以改善 生产线的均衡性, 但, …

11-8
Samsung Component Placer SM471 Administrator
’
s Guide
完成了所有贴装点的作业后结束。
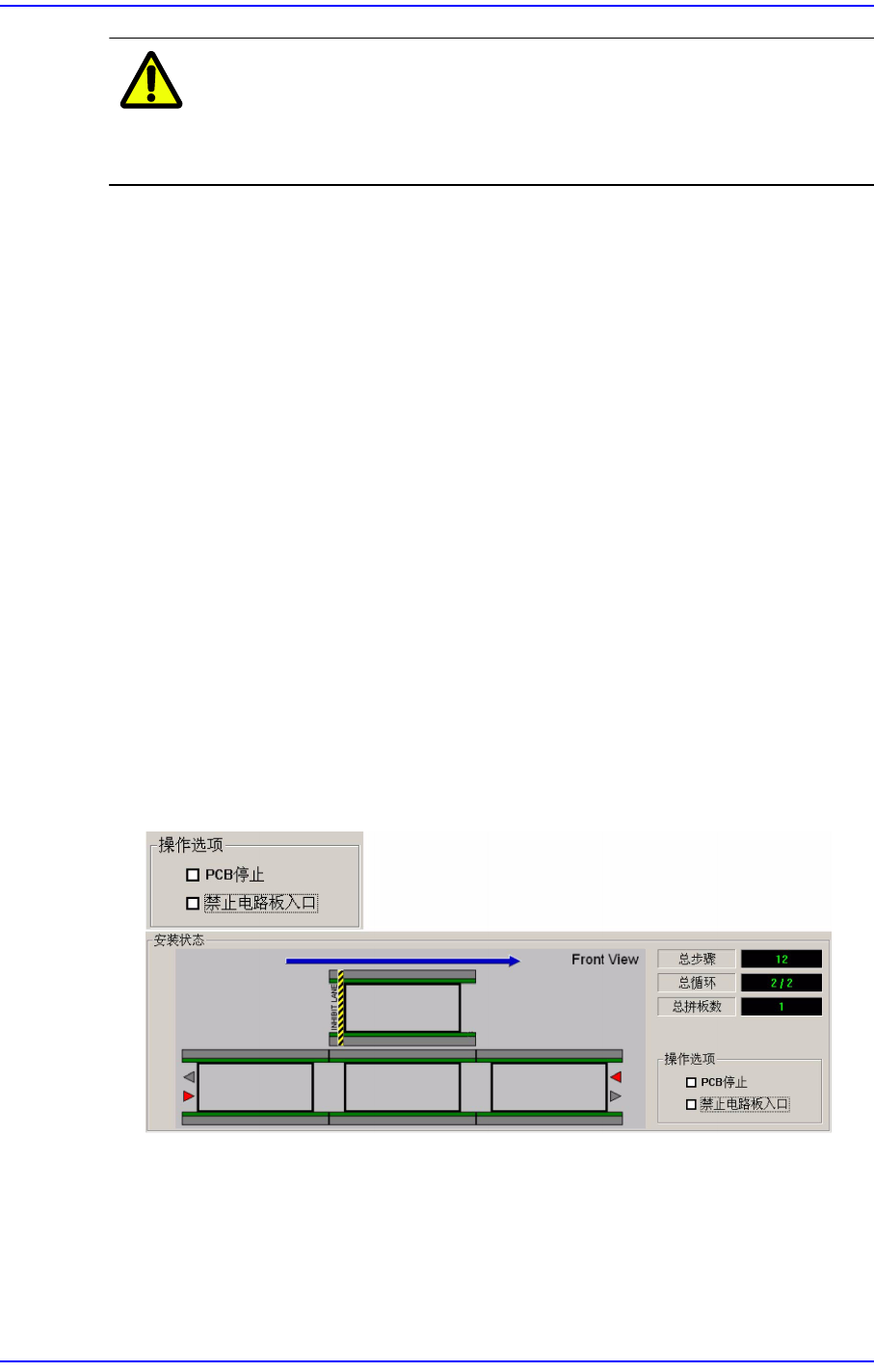
< 跳过电路板> 校验框
PCB不投入到conveyor的作业领域进行作业。
<操作选项> 领域
设定有关贴装作业的选项。
<传送PCB 前ANC 动作> 检查框
PCB搬入前更换喷嘴并等待时选择。
<预取配件>校验框
在待机位置的PCB进入作业Station之前或进入作业Station当中执行改变吸
嘴和预先进行部件吸附动作,提高生产性。
<预先移动到第一个基准点> 检查框
PCB搬入前更换喷嘴并等待时选择。
<废料前停止> 检查框
为了废弃部件HEAD移动到废弃箱后废弃部件前使其在此位置等待并使用
户直接确认有无异常。
<Stop Machine When Pick Error> 检查框
有Shield Cap等大型部件下面贴装小型贴片的 PCB。
在上述的操作PCB的双重起重机设备各个起重机各自进行作业因此需要先
贴装部件,即使在贴装部件的过程中发生故障无法贴装部件,但发生背面起
重机仍贴装Shield Cap的情况。
如此背面起重机比起正面起重机的贴片先贴装像Shield Cap置于部件上的部
件则无法贴装下端的部件因此发生吸附故障就立即停止设备的功能。
<激活补救功能> 校验框
具备Dual gantry的设备中由于给某一 gantry 供应部件的喂料器部件消尽,使
gantry无法继续作业时如果别的 gantry可进行作业的话代替进行作业,利用
一时提高生产性的功能时选择。
本功能应在<Operation Option>领域, 要被选择<Auto Skip Placements>
校验
框。
<Auto Skip Placements> 选择框
即使在自动生产中消尽特定部件,也可对剩余的贴装点继续进行作业发生警
告信息。本功能可在 SM411设备中使用。
11-9
Production Setup
注 意 本功能可单纯地继续贴装作业,但是由于部件消尽对跳越的部件
在此后的作业中预想到与已贴装的部件发生干涉,请解除本功能
进行使用。
<FIFO Board Processing>复选框
在双轨道(Lane)传送轨道上先进行作业的PCB 没有完成作业之前,不得开始
进行其它轨道(Lane)的PCB作业。该功能可以改善生产线的均衡性,但,实
际上该功能对生产线生产效率的改善效果会根据作业条件而不同。
<PCB传输速度> 组合框
调整PCB移送速度的组合框。PCB 过重时选择过快的速度,会发生输送机的传
送带无法充分移送PCB,只是传送带滑动旋转的情况。
基本选择为Middle。必要时请设置适当的速度。
Fast: 快速
中速: 普通速度
慢速: 慢速
<速度> 滑条
设置X, Y轴驱动电动机的驱动速度。
<Inhibit Lane>区
选择不使用的工作站(Workstation)。选择后,PCB 不会被载入该工作站。该功能
不适用于SM411设备。
<Z 轴贴装延时> 滑条
部件注册时 Common Data中设置的贴装 Delay 值再加上滑条中指定的值,执行
作业。该值只适用于 Z 轴。
<详细> 按钮
生产PCB时,为了选择显示在’SMVision’窗口中的影象时使用。

11-10
Samsung Component Placer SM471 Administrator
’
s Guide
<模式> 组合框
Camera
需要观看某种特定摄像机的影像时选择。请在<Device>组合框中选择相
应的摄像机。
Head
要观看使用某特定head 吸附的部件影像时选择。请在<Device> 组合框中
选择相应的head。
Camera Error
要观看在某特定摄像机发生的部件识别错误影像时选择。
作业中按照贴装顺序显示部件的识别影像,作业完成后显示在下面的
<Device>组合框中选择的摄像头最后发生的错误影像。
Head Error
要观看某特定Head吸附部件的识别错误影像时选择。
作业中按照贴装顺序显示部件的识别影像,作业完成后显示在下面
<Device>组合框中选定的head 作业的部件中最后发生部件的识别错误影
像。
Last Error
作业中按照贴装顺序显示部件的识别影像,作业完成后显示作业中最后
发生部件的识别错误影像。
System
按照贴装顺序显示部件的识别影像。