RX-8_维修手册.pdf - 第83页
第 2 章 操作顺序书 2- 2. 制造设置菜单 41 Stage3 : 伺服调 整 St age2 的处理完成后,将 显示如下画面。 进行右侧装置的伺服调 整。 触摸[开始测量]。 进行左右一次性更换台 车 上升 、前面护罩的锁定,开始 轴移动 测定 。 注意 • 执行一次测定后,就可 以开始对测定条件 进行 编辑。如 触摸表内的项目,会显 示软键 盘。 • 测定次数的上限是3次 。 如将 次数一栏设为 “ 0 ” ,则不进行该项目的…
第
2
章
操作顺序书
2-2.
制造设置菜单
40
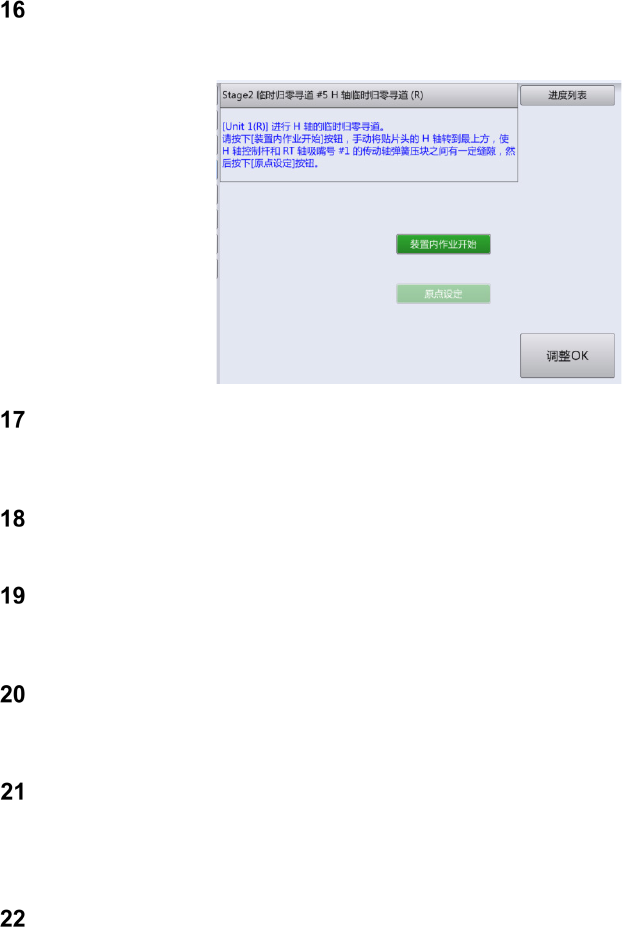
触摸[调整 OK]。
显示右侧装置之
H
轴的暂定原点确定画面。
触摸[装置内作业开始]。
进行右侧一次性更换台车下降、前面护罩解除锁定。
打开前面护罩,用手转动右侧装置之贴片头机构的 H 轴,使之移动到最上端,然后进
行设置,使 H 轴手柄与 RT 轴之 1 号吸嘴号的内轴弹簧压板之间出现空隙。
关闭护罩,触摸[原点设置]。
进行右侧一次性更换台车上升、前面护罩的锁定。
触摸[调整 OK]。
显示左侧装置之
Z
轴的暂定原点确定画面。
左侧装置也与右侧装置相同,根据画面的指示按照 Z 轴、XY 轴、RT/RN 轴、H 轴的
顺序进行暂定原点确定。
H
轴的作业结束后,会显示[暂定原点确定完成。]。
触摸[调整 OK]。
显示[
Stage 3
伺服器调整]的[个别显示]画面。
第
2
章
操作顺序书
2-2.
制造设置菜单
41
Stage3
:伺服调整
Stage2
的处理完成后,将显示如下画面。
进行右侧装置的伺服调整。
触摸[开始测量]。
进行左右一次性更换台车上升、前面护罩的锁定,开始轴移动测定。
注意
•
执行一次测定后,就可以开始对测定条件进行编辑。如触摸表内的项目,会显示软键
盘。
•
测定次数的上限是3次。如将次数一栏设为
“
0
”
,则不进行该项目的距离测定。
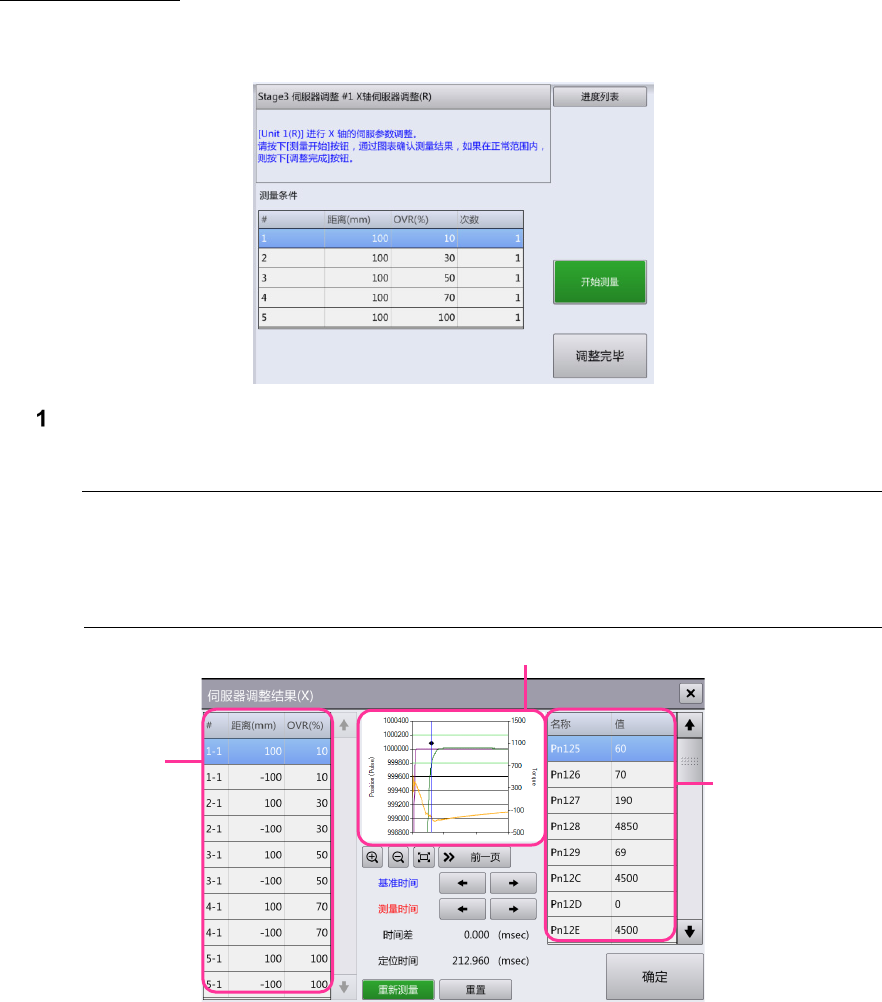
测定结束后,显示测定结果的画面。
(a)
调整项目列表
如选择某一行,其测定结果将显示在数据图内。也可以触摸[
Next
]来往下移一行。
(b)
数据图
(c)
参数列表
a
b
c
第
2
章
操作顺序书
2-2.
制造设置菜单
42
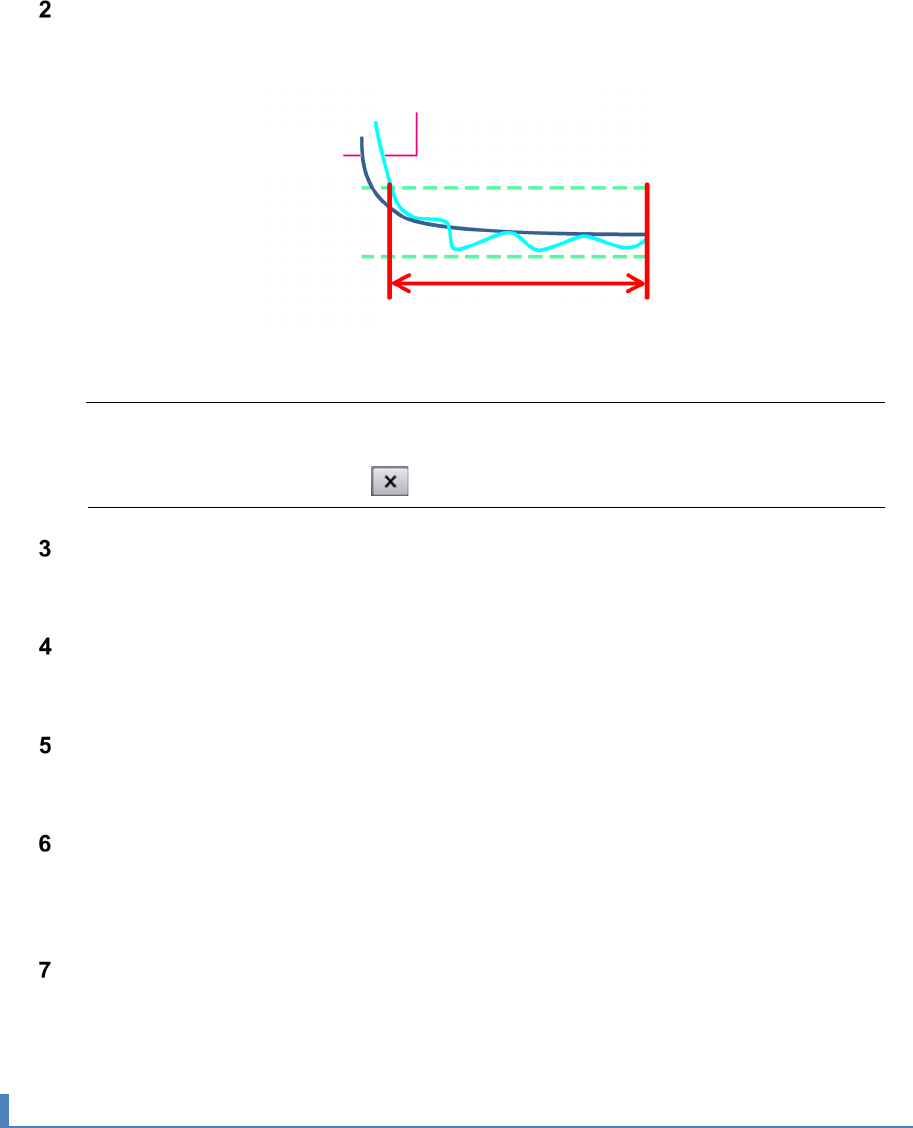
检查数据图中显示的测定结果是否在容许范围内。
容许范围:在确认范围内测定线未超出绿色虚线
测定结果为
NG
时,请更改参数,触摸[重新测量]再次进行测定。
Tips
•
如触摸[重置],参数将回到初始状态。
•
如要更改测定条件,请触摸 关闭测定结果画面,在伺服调整画面上进行。
触摸[Next],检查全部图的测定结果,如在容许范围内则触摸[确定]。
关闭测定结果的画面,回到伺服调整画面。
触摸[调整完毕]。
于是显示右侧装置之
Y
轴的伺服调整画面。
与 X 轴的操作顺序相同,按照 Y 轴、Z 轴、H 轴、RT 轴、RN 轴的顺序进行伺服调整。
右侧装置之全部轴的调整完成后,将显示左侧装置
X
轴的伺服调整画面。
左侧装置也与右侧装置相同,按照 X 轴、Y 轴、Z 轴、H 轴、RT 轴、RN 轴的顺序进
行伺服调整。
左侧装置全部轴的调整完成后,会显示[全部伺服调整作业完成。]。
触摸[调整 OK]。
自动显示[进度列表]画面,下一个[校准]菜单可开始操作。
2-2-5.
校准
由于校准的操作由许多工序组成,将在
“2-3.
校准
”
中详细说明。
理想的形状
测定线(波状线)
测定范围
从进入绿线处至右端