FX-2_机器控制参数.pdf - 第48页
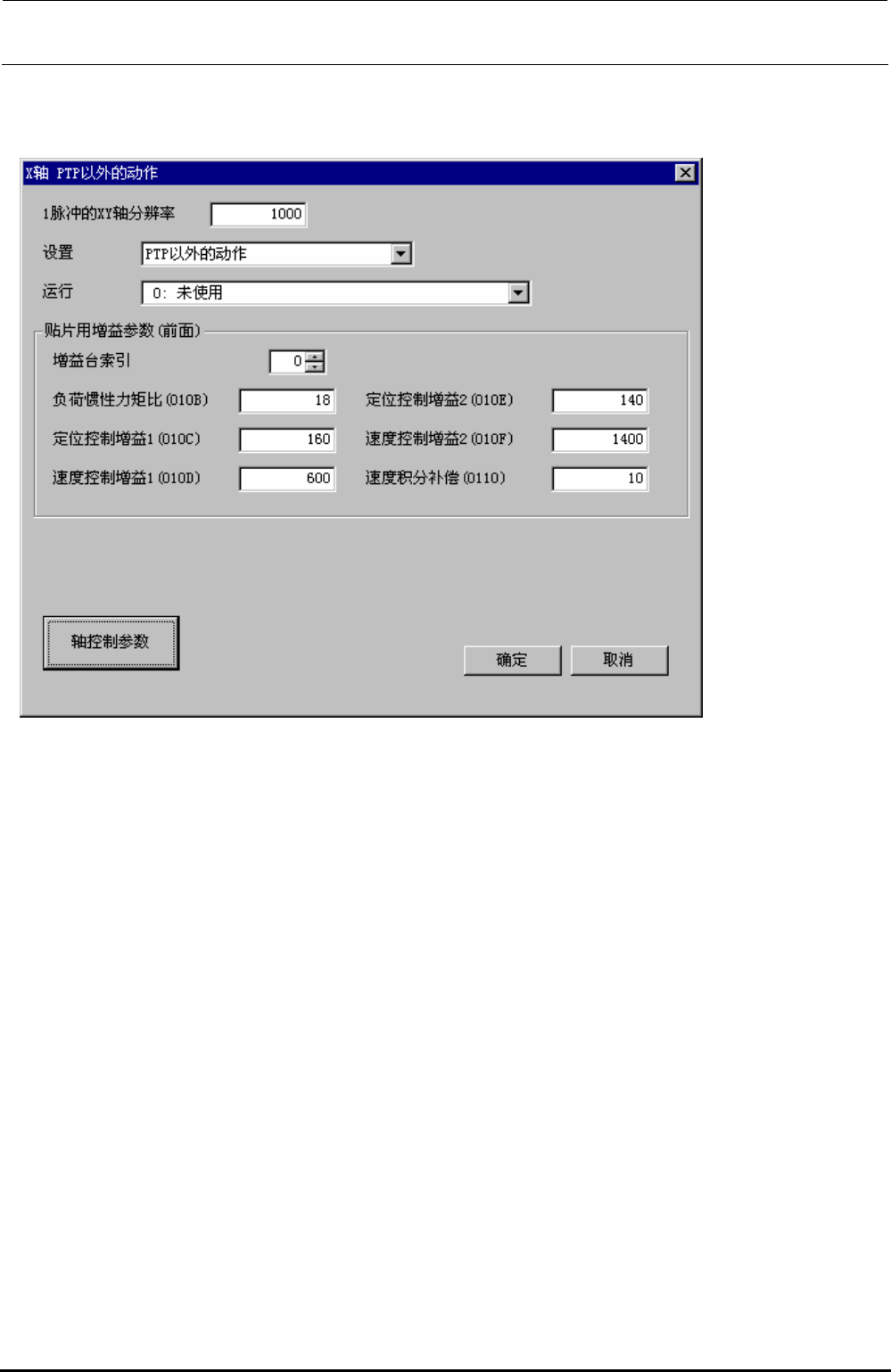
Rev1.0 机器控制参数 4-22 4.2.4 PTP 以外的动作增益参数 图 4.2-6 PTP 以外的动作增益参数 (1) 设置画面的显示方法 前面贴片时 PTP 以外的 动作的控制参数设置画面 ( 图 4.2-4) : [ 贴片用增益参数(前面) ] 按键 后面贴片时 PTP 以外的 动作的控制参数设置画面 ( 图 4.2-4) : [ 贴片用增益参数(后面) ] 按键 ・ Y Y台时 PTP 以外的 动作的控制参数设置画面 (…
Rev1.0
机器控制参数
4-21
(4)运行
№
类别 内 容
1 0
未使用
2 1
JOG 开始动作(高速)
3 2
JOG 开始动作(低速)
4 3
JOG 停止动作
5 4
STEP 动作
6 5
HOME 时的 JOG 开始(-方向)
7 6
HOME 时的 JOG 停止(-方向)
8 7
HOME 时的 JOG 开始(+方向)
9 8
HOME 时的 JOG 停止(+方向)
10 9
HOME 时的 STEP 动作
11
10 ~
14
预备
JOG 基本曲线图
Rev1.0
机器控制参数
4-23
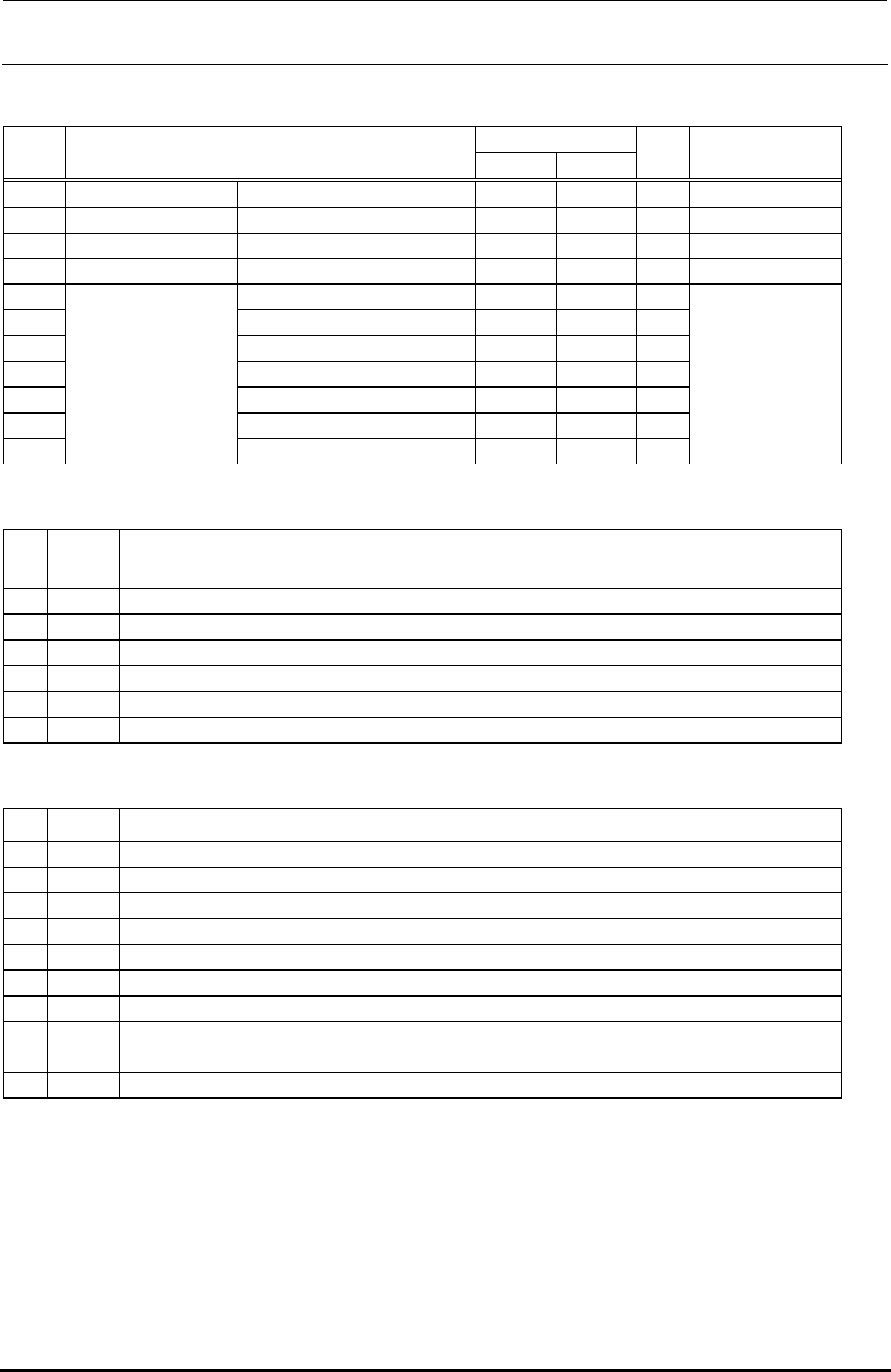
(2)设置项目(X轴、Y轴、Y台轴(前面・后面贴片)通用)
输入范围
№
项目
最小值
最大值
单
位
备考
1
1脉冲的XY轴分辨率
2
设置
参照(3)设置
3
行程分类
0 9
参照(4)行程
4
移动量
mm
5
位置控制增益
0 4
6
负荷惯性力矩比
7
定位控制增益1
8
速度控制增益1
9
定位控制增益2
10
速度控制增益2
11
PTP 动作
(增益参数)
速度积分补偿
初期显示为控制
参数设置画面的
位置控制增益设
置的表。
(3)设置
№
类别 内 容
1 0
PTP 高速动作
2 1
PTP 中速动作
3 2
PTP 低速动作
4 3
PTP 高速动作 2
5 4
PTP 低速动作 2
6 5
PTP 以外的动作
7 6
打开安全盖时
(4) 行程分类
№
类别 内 容
1 0
s <= 速度分类[0]的移动量(移动量0时未使用)
2 1
速度分类[0]的移动量< s <= 速度分类[1]的移动量(移动量0时未使用)
3 2
速度分类[1]的移动量< s <= 速度分类[2]的移动量(移动量0时未使用)
4 3
速度分类[2]的移动量< s <= 速度分类[3]的移动量(移动量0时未使用)
5 4
速度分类[3]的移动量< s <= 速度分类[4]的移动量(移动量0时未使用)
6 5
速度分类[4]的移动量< s <= 速度分类[5]的移动量(移动量0时未使用)
7 6
速度分类[5]的移动量< s <= 速度分类[6]的移动量(移动量0时未使用)
8 7
速度分类[6]的移动量< s <= 速度分类[7]的移动量(移动量0时未使用)
9 8
速度分类[7]的移动量< s <= 速度分类[8]的移动量(移动量0时未使用)
10 9
速度分类[8]的移动量< s <= 速度分类[9]的移动量(移动量0时未使用)