DEUKYX-193-3100_G5S2_VOL3.pdf - 第194页
DEUKYX 2-26 193-3100 2.4 Beam 2.4 Beam Wird der [Beam]-Tab im Bildschirm "Offset Data" gedrückt, öffnet sich der folgende Bildschirm. Grafischer Ablauf [1] [2] [3] [4] [5] [6] [7] F3B26 [1] X (Horizontal) und Y…

DEUKYX
2-25193-3100
2.3 Feeder A/ Feeder B
[5] Head Sel
Wählt den Kopf, der den Feeder-Offset automatisch berechnet.
[6] (L) Data Calc Set (Blk)
Die automatische Berechnungsmethode der L-Daten (Teach-Ergebnis des
Offsetwerts der Aufnahmeebene) einschl. “2Pt” und “3Pt“.
Drücken Sie [2Pt] oder [3Pt], werden die L-Daten für Kopf 1 oder 2 des
gewählten Blocks berechnet. Der Block wird mit [1] Feeder Change-Tab
gewechselt.
[7] [Save]-Taste
Wird diese Taste gedrückt, werden die eingegebenen Daten gespeichert.
[Cancel]-Taste
Wird diese Taste gedrückt, kehrt das System zum Bildschirm "Save Data"
zurück und die Eingaben werden verworfen.
DEUKYX
2-26193-3100
2.4 Beam
2.4 Beam
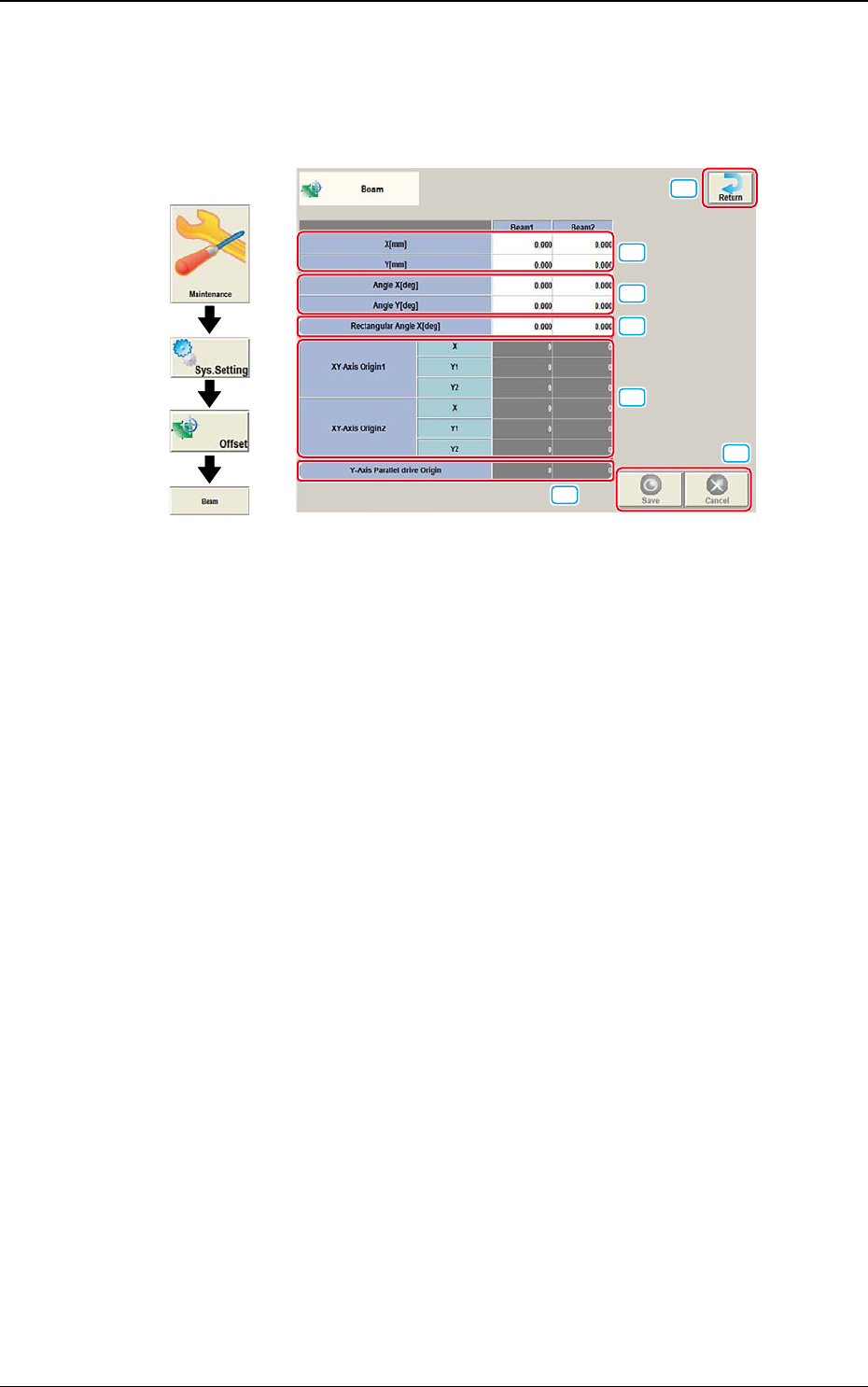
Wird der [Beam]-Tab im Bildschirm "Offset Data" gedrückt, öffnet sich der
folgende Bildschirm.
Grafischer
Ablauf
[1]
[2]
[3]
[4]
[5]
[6]
[7]
F3B26
[1] X (Horizontal) und Y (Vertikal) [mm]
Korrigiert designbedingte Positionsabweichungen des Abstands zwischen
Maschinennullposition und dem Mittelpunkt der PEC-Kamera in der Kopf-
Nullposition.
DEUKYX
2-27193-3100
2.4 Beam
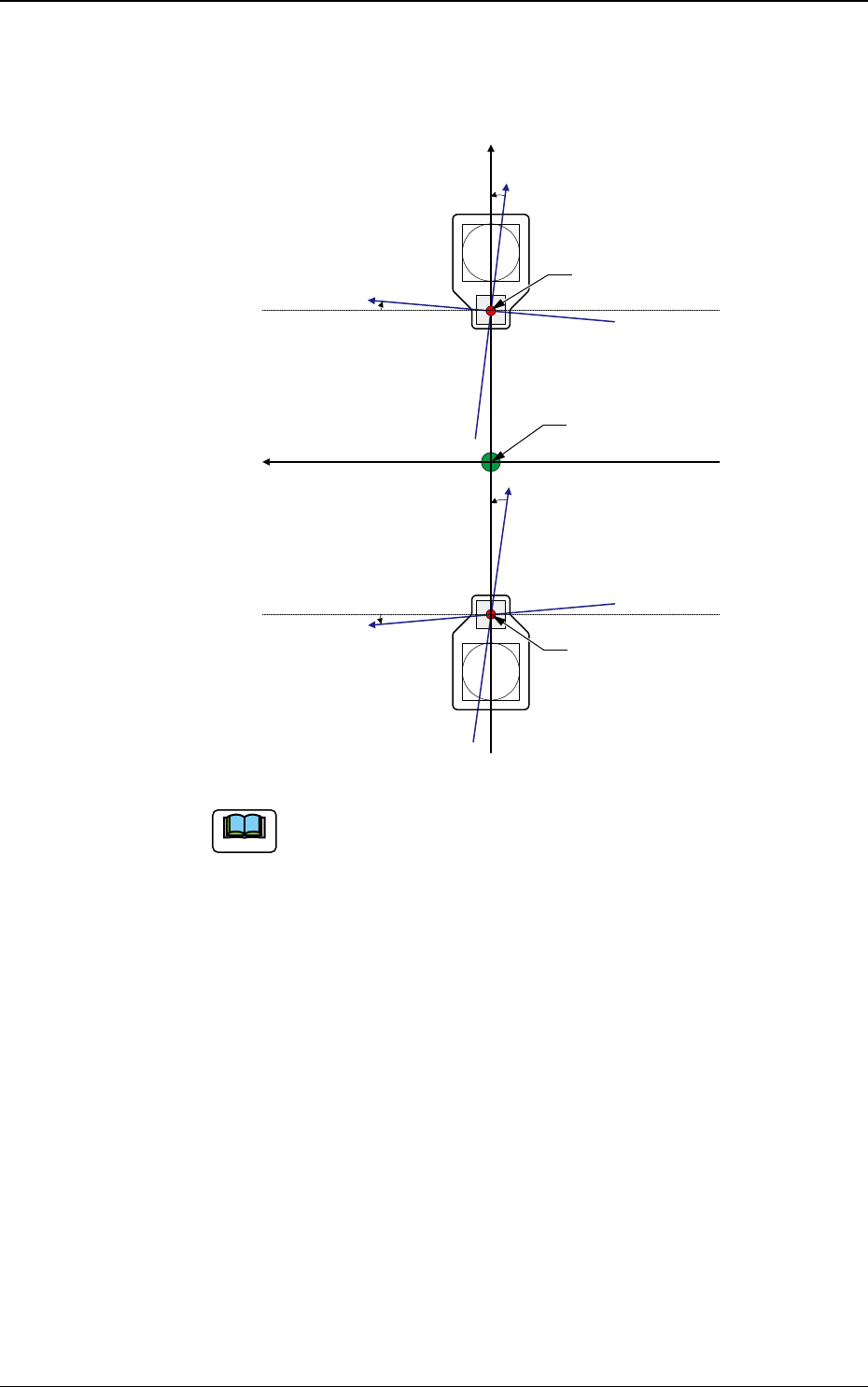
[2] Angle X und Angle Y [deg]
Die Parameter korrigieren die X- und Y-Achse der Kopfeinheit (Beam) zum
Maschinen-Referenzkoordinatensystem.
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm-Ym : Maschinenreferenzkoor
dinatensystem
Xb-Yb : Kopfeinheit (Beam)
Koordinate
Kopfnullpunkt
Pm. Maschinenreferenz
Koordinatenursprung
Kopfnullpunkt
F3B27
Hinweis
In den Textfeldern "Angle X [deg]" und "Angle Y [deg]" müssen Pluswerte
eingegeben werden, wenn das reale Kopfeinheit-Koordinatensystem
entgegen dem Uhrzeigersinn gekippt ist (in Bezug auf das Maschinen-
Referenzkoordinatensystem).