DEUKYX-193-3100_G5S2_VOL3.pdf - 第206页
DEUKYX 2-38 193-3100 2.5 Head [3] Head Pivot Point Korrigiert designbedingte Positionsabweichungen zwischen Rotationszentrum des Kopfes und dem Mittelpunkt der PEC-Kamera. Xm(+) Ym(+) Head Pivot Point PEC Erkennungskamer…
DEUKYX
2-37193-3100
2.5 Head
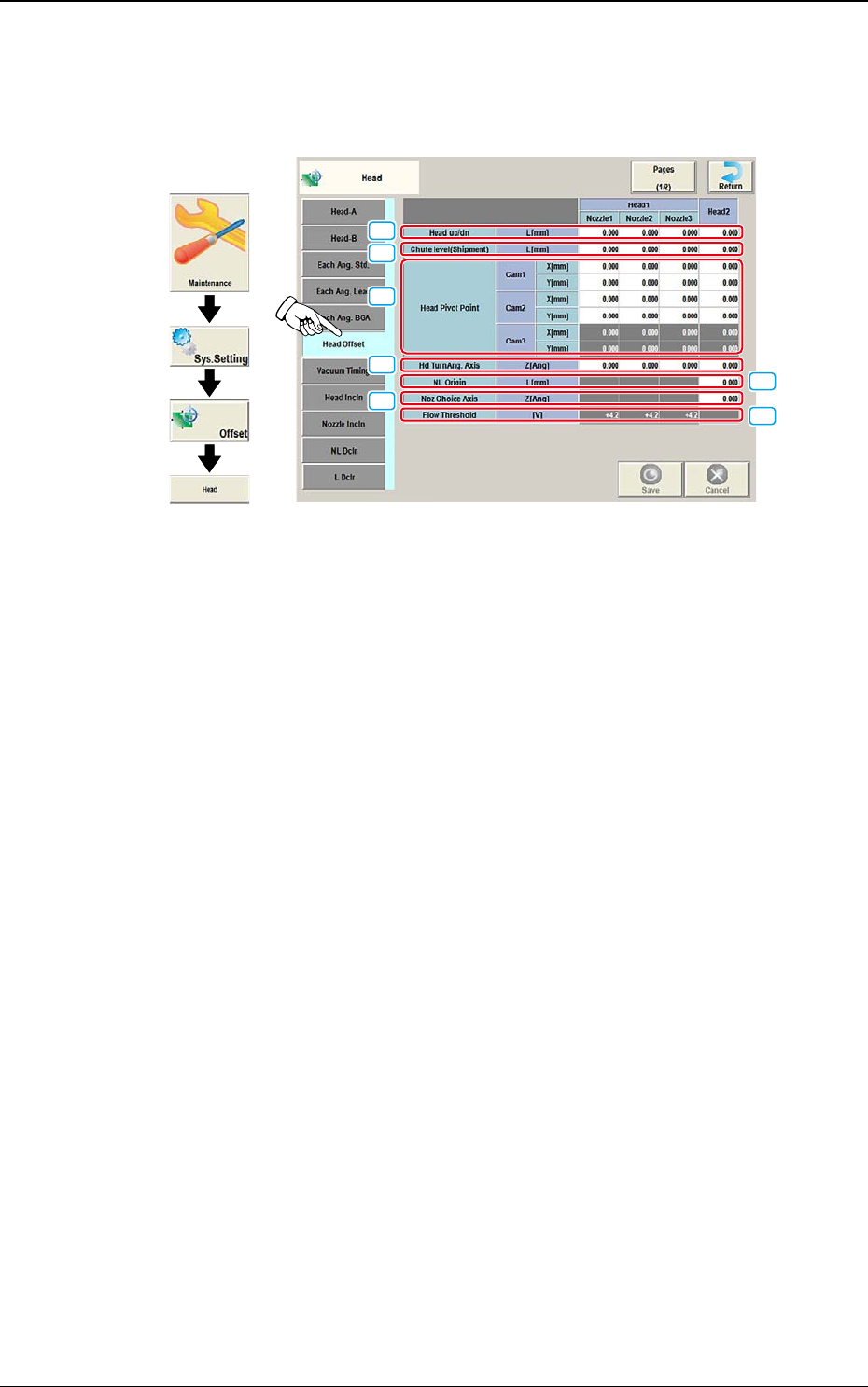
2.5.6 Head Offset
Wird der [Head Offset]-Tab im Bildschirm "Head" gedrückt, öffnet sich der
folgende Bildschirm.
Grafischer
Ablauf
[1]
[2]
[3]
[4]
[5]
[6]
[7]
F3B37
[1] Head up/dn
Die Parameter werden verwendet, um die designabhängige Abweichungen
(verursacht durch Anbringen des Master-Aufnehmers am Kopf und
Absenken um den angegebenen Betrag bei kombinierten Vorgängen der
Kopf / Aufnehmer-U / D-Achse) des Abstandes zwischen der Oberseite
der Leiterplatte und Unterseite des Aufnehmers zu korrigieren. Die
Achsbewegungen aller Achsen wird zusätzlich überprüft.
Wenn der gemessene Wert größer ist, als der vorgesehene, muss an die
Offsetdaten ein Plus-Zeichen angehängt werden.
[2] Chute level (Shipment)
Diese Versatzparameter für die Abstützung werden verwendet, um die
Differenz der Schienenhöhe bei Auslieferung von der beim Kopfwechsel zu
berechnen, indem die Schienenhöhe vorab bei Auslieferung gemessen und
bei Kopfwechsel ein Teachen der Schienenhöhe durchgeführt wird.
DEUKYX
2-38193-3100
2.5 Head
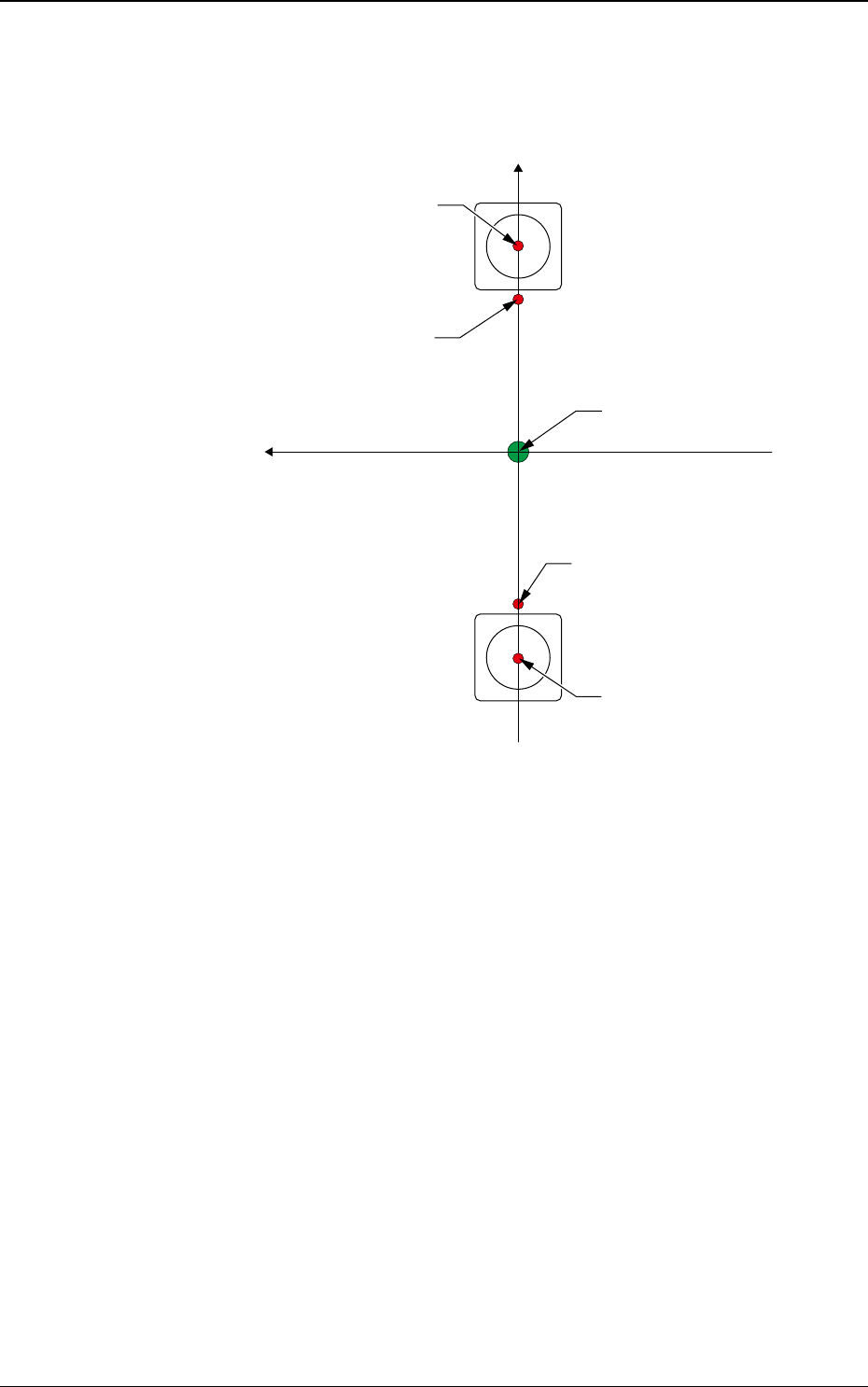
[3] Head Pivot Point
Korrigiert designbedingte Positionsabweichungen zwischen
Rotationszentrum des Kopfes und dem Mittelpunkt der PEC-Kamera.
Xm(+)
Ym(+)
Head Pivot Point
PEC Erkennungskamerazentrum
Xm-Ym : Maschinenreferenzkoordi
natensystem
Pm. Maschinenref erenz-
Koordinatenur
PEC Erkennungskamerazentrum
Head Pivot Point
F3B38
DEUKYX
2-39193-3100
2.5 Head
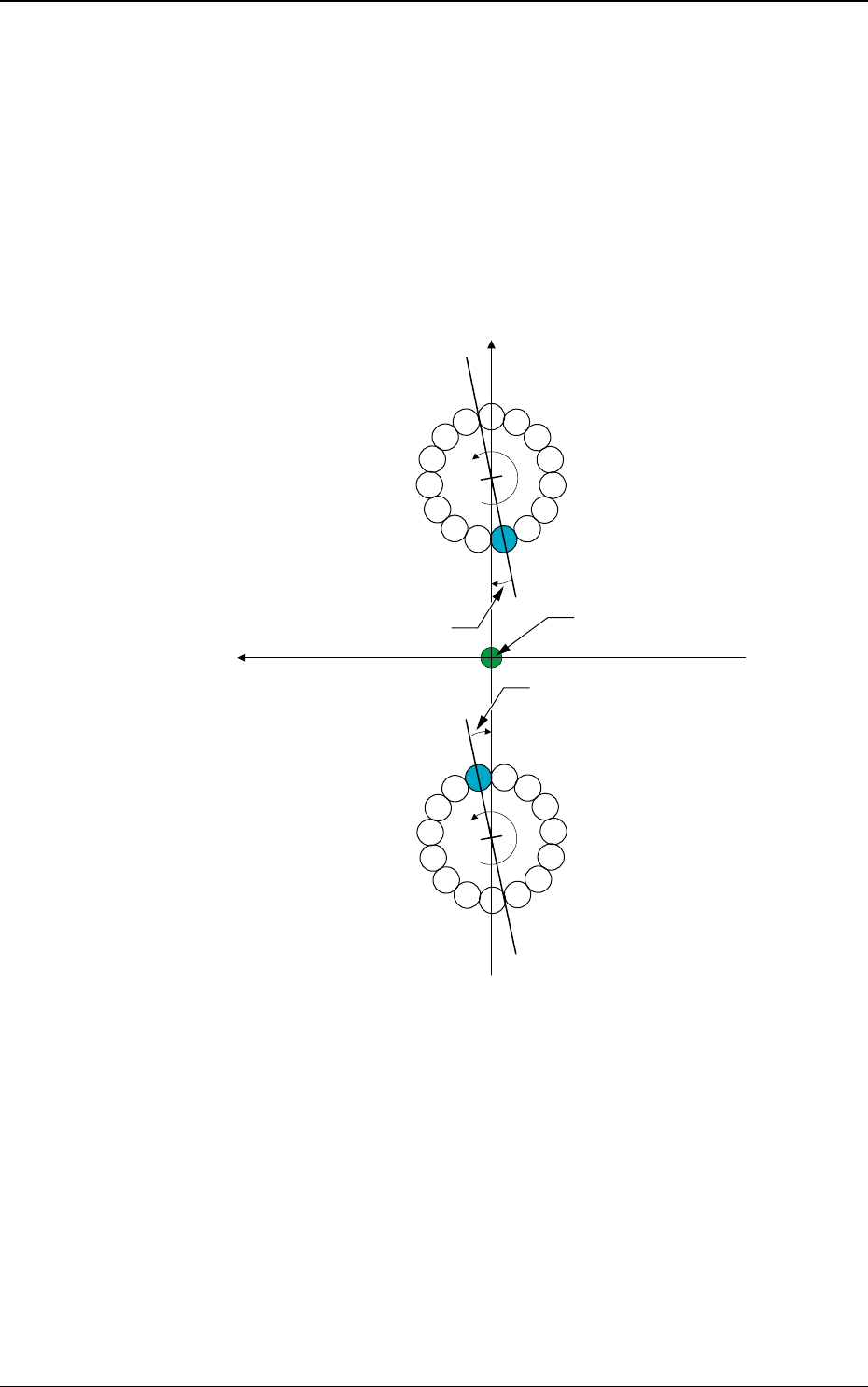
[4] Hd TurnAng. Axis
Korrigiert Winkelabweichungen entlang einer Linie zwischen dem Zentrum
von Aufnehmer #1 und der Position zwischen den Aufnehmern#8 und #9
an der Z-Phasenposition der Kopfdrehung basierend auf die Maschinen-
Referenzkoodinaten.
Wenn die Linie, die das Zentrum des Aufnehmers #1 mit den Aufnehmern#8
und #9 verbindet, im Maschinen-Referenzkoordinatensystem X/Y nach
rechts gekippt ist, muss an den Offsetwert ein Plus-Zeichen angehängt
werden.
4
5
6
7
8
9
10
11
12
13
14
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
1
2
3
Xm(+)
Ym(+)
DD (+)
DD (+)
Xm-Ym : Maschinenreferenz
Koordinatensystem
Kopf-Rotationswinkeloffset
DD Motor Z-Phase
Stopp-Position
Kopf-Rotationswinkeloffset
Pm. Maschinenreferenz-Koordina-
tenursprung
DD Motor Z-Phase
Stopp-Position
F3B39
[5] NL Origin
Korrigiert die durch die Drehung der NL-Achse verursachte Abweichungen
zwischen Aufnehmer-U/D-Mechanik und Aufnehmerlaufrolle.
[6] Noz Choice Axis
Korrigiert die Winkelabweichung zwischen der Rotation des Kopfs und den
Aufnehmer-Auswahlachsen.
[7] Flow Threshold
Mit Hilfe des multifunktionalen Kopf-Durchusssensors wird beurteilt, ob
ein Bauteil vorhanden ist oder nicht.