DEUKYX-193-3100_G5S2_VOL3.pdf - 第195页
DEUKYX 2-27 193-3100 2.4 Beam [2] Angle X und Angle Y [deg] Die Parameter korrigieren die X- und Y-Achse der Kopfeinheit (Beam) zum Maschinen-Referenzkoordinatensystem. Xm(+) Ym(+) Yb(+) Xb(+) Yb(+) Xb(+) Xm-Ym : Maschin…
DEUKYX
2-26193-3100
2.4 Beam
2.4 Beam
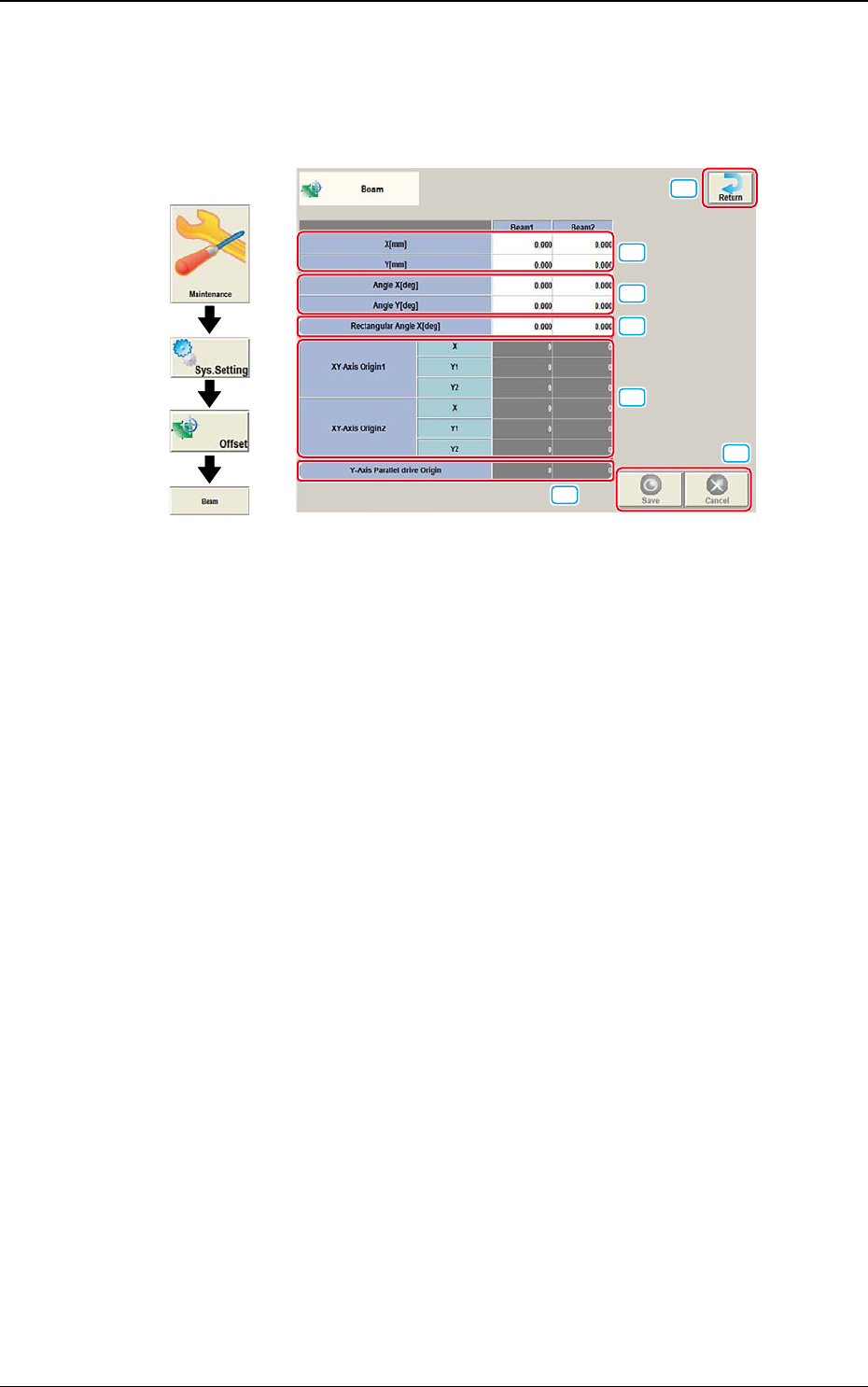
Wird der [Beam]-Tab im Bildschirm "Offset Data" gedrückt, öffnet sich der
folgende Bildschirm.
Grafischer
Ablauf
[1]
[2]
[3]
[4]
[5]
[6]
[7]
F3B26
[1] X (Horizontal) und Y (Vertikal) [mm]
Korrigiert designbedingte Positionsabweichungen des Abstands zwischen
Maschinennullposition und dem Mittelpunkt der PEC-Kamera in der Kopf-
Nullposition.
DEUKYX
2-27193-3100
2.4 Beam
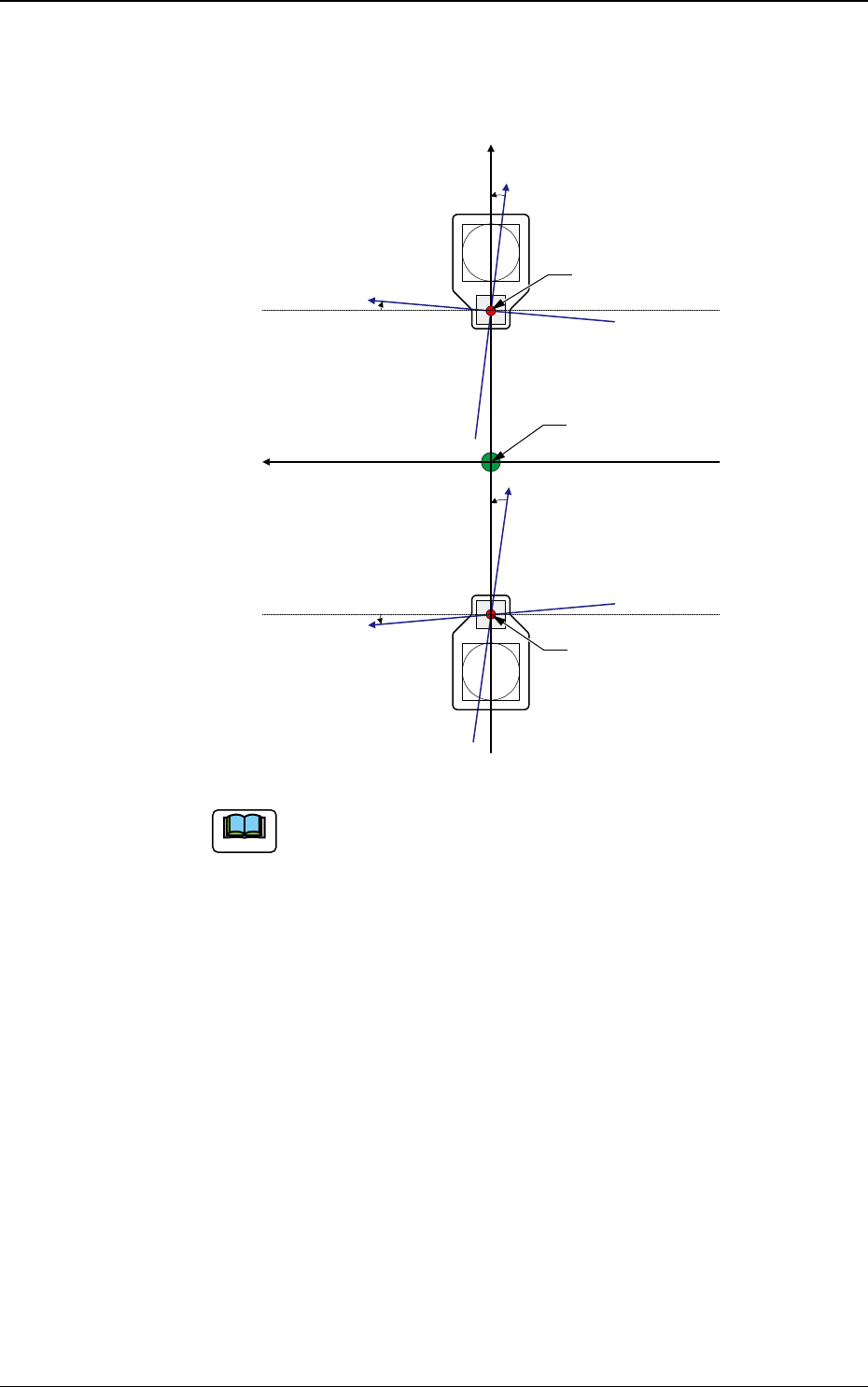
[2] Angle X und Angle Y [deg]
Die Parameter korrigieren die X- und Y-Achse der Kopfeinheit (Beam) zum
Maschinen-Referenzkoordinatensystem.
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm-Ym : Maschinenreferenzkoor
dinatensystem
Xb-Yb : Kopfeinheit (Beam)
Koordinate
Kopfnullpunkt
Pm. Maschinenreferenz
Koordinatenursprung
Kopfnullpunkt
F3B27
Hinweis
In den Textfeldern "Angle X [deg]" und "Angle Y [deg]" müssen Pluswerte
eingegeben werden, wenn das reale Kopfeinheit-Koordinatensystem
entgegen dem Uhrzeigersinn gekippt ist (in Bezug auf das Maschinen-
Referenzkoordinatensystem).
DEUKYX
2-28193-3100
2.4 Beam
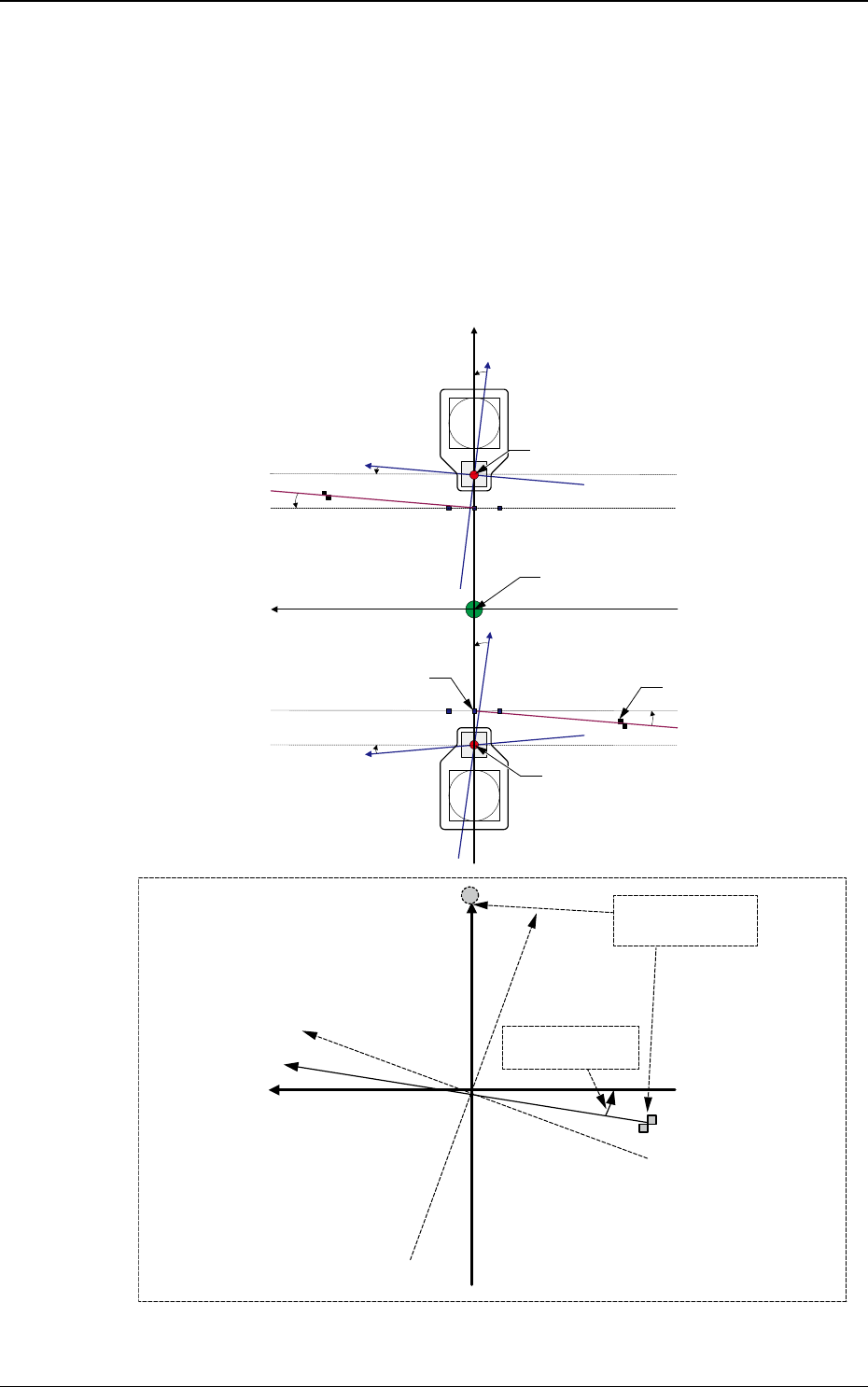
[3] Rectangular Angle X [deg]
Diese Parameter repräsentieren den Betrag der Winkelabweichungen
(X-Richtungen) der Marke auf der Maschine im Vergleich zu der X-Richtung
im Referenzkoordinatensystem der Maschine.
Die Parameter werden verwendet, um die drei Marken im Maschinenbereich
zu überprüfen, an denen nur geringfügige Positionsänderungen in
Abhängigkeit von den Temperaturänderungen entstehen, und die X /
Y-Achsen der Kopfeinheit (Beam) so einzustellen, dass sie im rechten
Winkel aufeinander stehen.
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm'
Xm-Ym : Maschinenreferenzkoor
dinatensystem
Xb-Yb : Kopfeinheit (Beam)
Koordinatensystem
Kopfnullpunkt
Pm. Maschinenreferenz-Koordinatenur-
sprung
Referenzmarke 2
Kopfnullpunkt
Referenzmarke 1
Marke auf
Maschine
Maschinenreferenzkoor-
dinatensystem
Rectangular Angle
X [deg]
Markenkoordinaten
system
heit(Beam)-Koordinat-
ensystem
F3B28