xp141-241-341-5.0E.pdf - 第157页
FK-9F98- 29 XP Series Training Text for Service Engineers Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 11 of 20 Fuji Machine Mfg. Co., Ltd. Okazaki. SMT Equipment Quality Assurance Dept . 6 – 11 CS Section…
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 10 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 10 CS Section
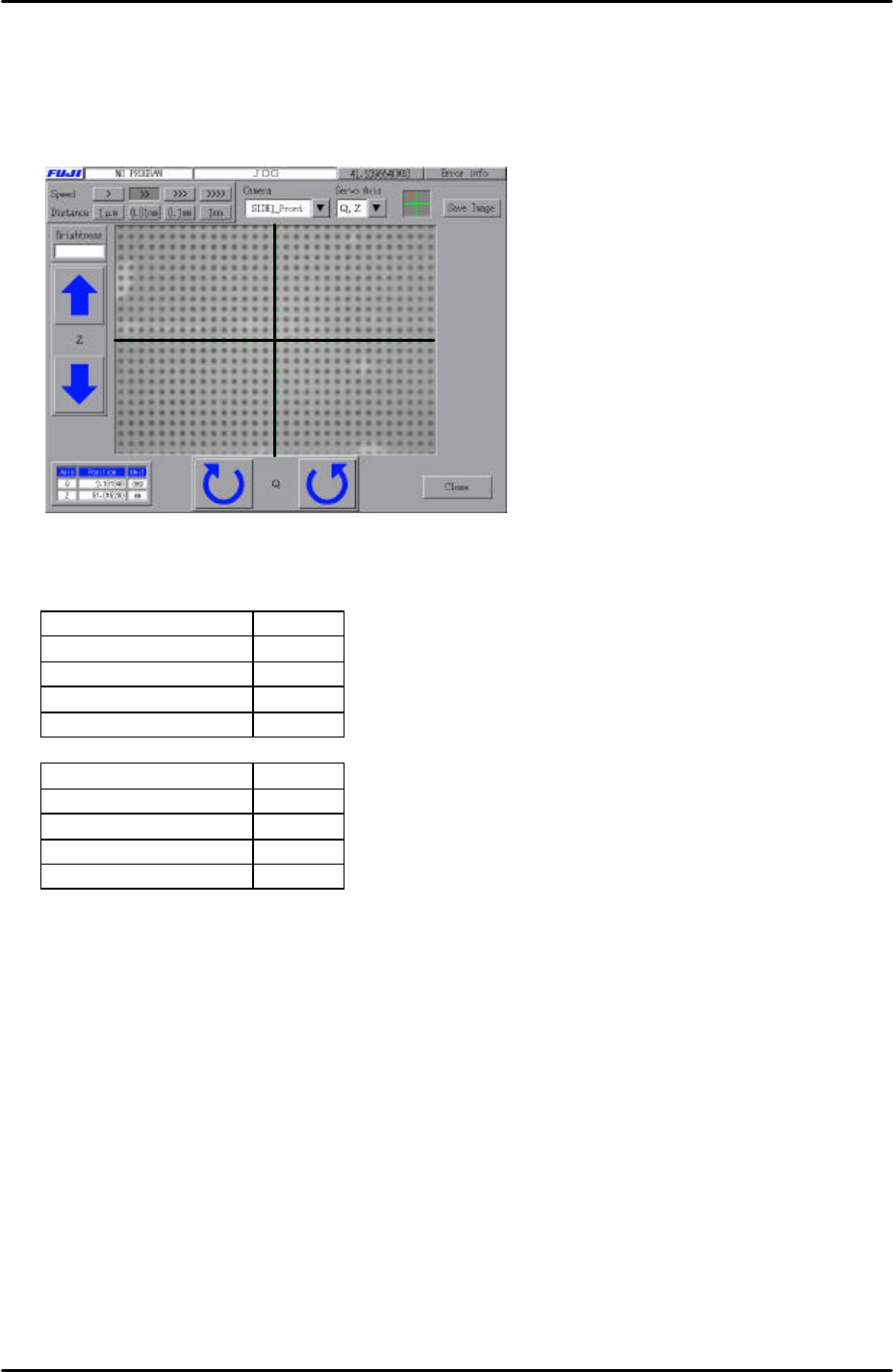
6. Select [Maintenance A] – [Jog] – [Side1front/side2front] – and display the cross hairs
on the screen.
7. Set the center of the cross hairs in the center of one of the glass gage dots, as
shown in the picture below:
8. Select [Maintenance A] – [I/O Check] – and depending on which camera you are
adjusting set the following I/Os:
Front camera I/O
Y00C StroboTrigger ON
Y00D StroboLampA ON
Y00E StroboLampB ON
Y00F StroboCharge ON
Rear camera I/O
Y00C StroboTrigger ON
Y00D StroboLampA ON
Y00E StroboLampB OFF
Y00F StroboCharge ON
Default settings
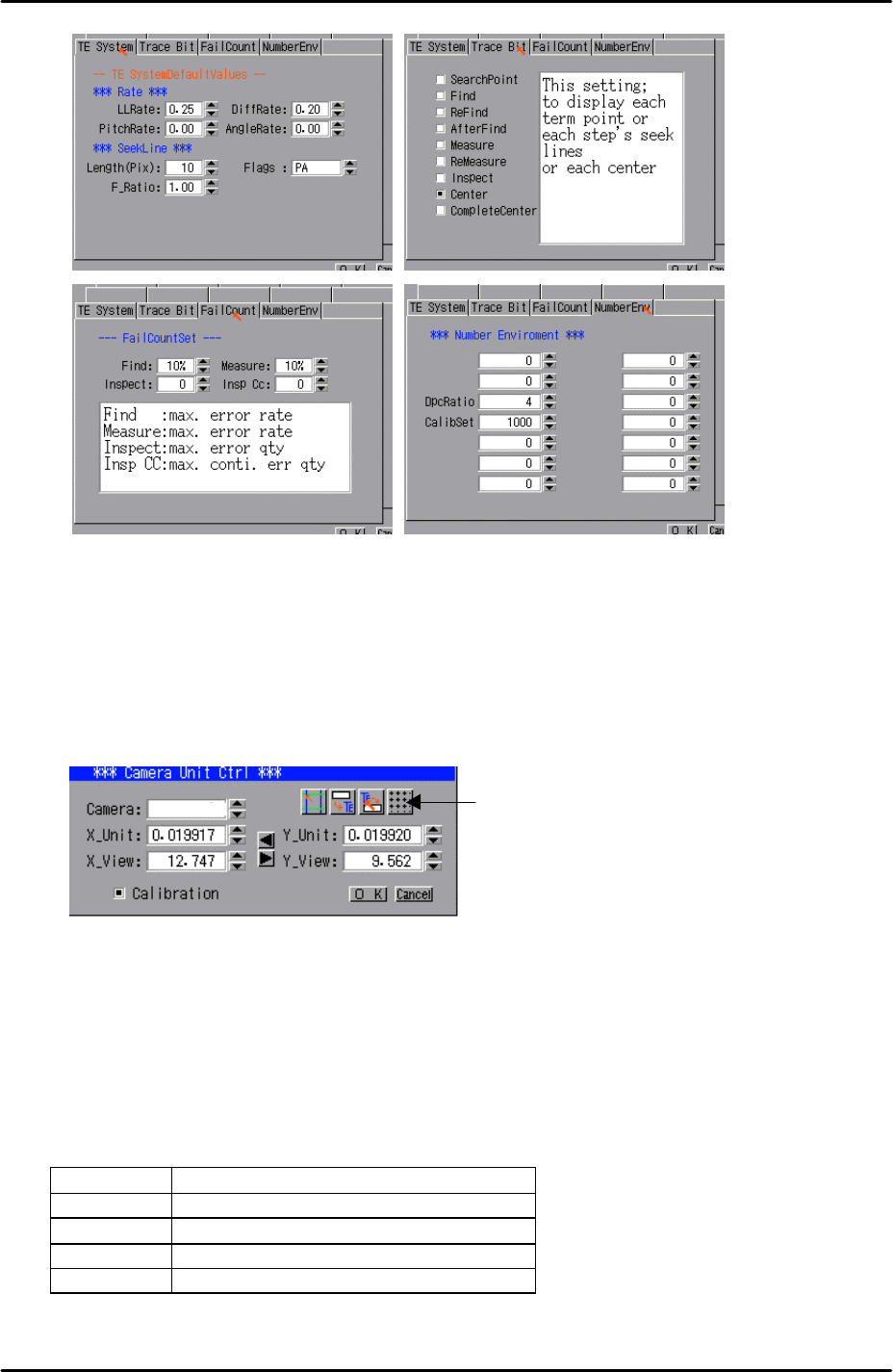
1. Select [Program] – [Template Editor] – then right click on the screen to display a
menu box.
2. Select [Utility] – [Default settings] and confirm that the default settings are identical
to those in the following picture, note that the default settings are the same for the
mark camera and both parts cameras:
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 11 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 11 CS Section
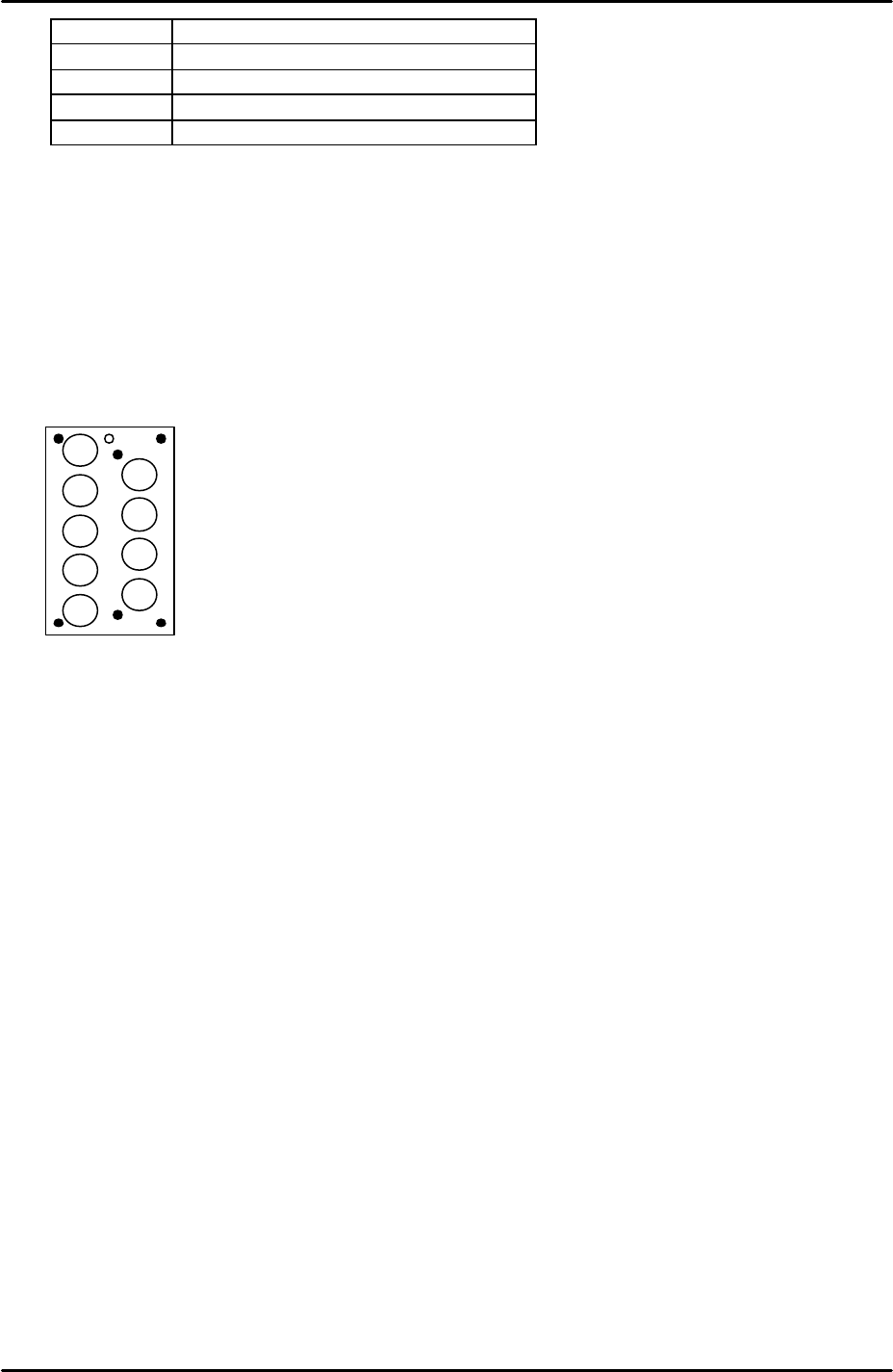
Resolution measurement
1. Select [Utility] – [Scale Setting] – [Camera 3] or [Camera 4] depending on which
camera you are adjusting. “Camera 3” is the side 1 camera. “Camera 4” is the side
2 camera.
2. Click on the resolution measurement tab:
3. Answer YES to the question “Set Center?” and the resolution measurement will
proceed.
4. Answer NO to the question “Do you save calibration data to FD?”
5. To the next question, “Save calibration data?” answer YES?
6. Confirm that the resolution results are within the tolerances described below:
Front camera resolution tolerance
X_Unit 0.052 ~ 0.055
X_View 33.00 ~ 35.00
Y_Unit 0.052 ~ 0.055
Y_View 24.80 ~ 26.20
Resolution
Measurement
3
FK-9F98-29 XP Series Training Text for Service Engineers
Edition 5.0 XP241 – Chapter 6 Proper Data Measurements Page 12 of 20
Fuji Machine Mfg. Co., Ltd. Okazaki.
SMT Equipment Quality Assurance Dept.
6 – 12 CS Section
Rear camera resolution tolerance
X_Unit 0.0804 ~ 0.0837
X_View 50.98 ~ 53.04
Y_Unit 0.0804 ~ 0.0837
Y_View 38.22 ~ 39.78
7. The resolution measurement is now complete. Right click on the screen and select
return.
6.8 Measuring the nozzle positions
1. Equipment: Nozzle jig (Z9731DEPJ0070). Ring jig (Z9531DEPJ0020).
2. Set the ring jig in the nozzle station number 1 pocket.
3. Select [Maintenance A] – [Jog] – and carefully inch the placing head above the
nozzle station number 1 pocket.
4. Press the emergency stop button to cut the 200 volt power supply to the servos and
then manually move the X, Y and Z axes until the nozzle jig can fit smoothly into the
ring jig.
5. Select [Maintenance C] – [Proper data editor] – [Nozzle position] –
[X_NzlPosX1/Y_NzlPosY1] – [Direct Servo Input] to save the current X-axis and Y-
axis servo counts to proper data.
6. Remove the nozzle jig from the placing head.
7. Confirm that the emergency stop button is pressed so that the 200 volt power
supply to the servos is OFF, and then manually move the Z axis until the placing
head just contacts the ring jig. Record the Z-axis counter value at this position.
8. Repeat this procedure for all nine of the nozzle station pockets and calculate the
average Z-axis counter value.
9. Select [Maintenance A] – [Jog] and bring the Z-axis to the average counter value.
10. Use inching to raise the Z-axis a further 0.1mm, and select [Maintenance C] –
[Proper data editor] – [Nozzle position] – [Z_NzlPosZ1] – [Direct Servo Input] to
save the current Z-axis position in proper data.
11. To calculate the maximum nozzle height add 51.5mm to the “Z_NzlPosZ1” value.
2
1
3
4
5
6
7
8
9