JX-100_SPE_EN06.pdf - 第34页
8. INTERFACE 8.1 Mechanical Interface Conveyor height ● 900 ±20 mm (Standard for Japan , China and Southeast Asia) 950 ±20 mm (Option for Eu rope and the U.S.A.) 、 (Standard for EN machine only) 8.2 Electrical interfaces…
7. CONTROL SYSTEM SPECIFICATIONS
7.1 Control
7.1.1 Program Selection
The production program is stored in SSD or a floppy disk (option).
When you use a USB port, you can store it on an external storage device also.
7.1.2 Limit of a production program
● Number of component placement steps: maximum 3,000 steps
● Maximum number of circuits per PWB: 1,200 for a matrix board
200 for a non-matrix board
● Maximum number of steps per PWB: 10,000 steps
● Maximum number of component data records: maximum number of component
types that can be attached on the machine
● Maximum number of component pick-up records: same as the above.
● Maximum number of registerable marks: 50sets for an IC mark, 1 set for a BOC
mark (2 to 3 marks)
7.2 Production mode
PWB production
- Specifies the number of PWBs you plan to produce and produces PWBs actually.
Trial
- Performs a trial PWB production.
You can select the PWB pick-up position tracking function or PWB placement position
tracking function that is to be performed after placement..
Dry run
- Checks the PWB pick-up/placement process without using any component.
29

8. INTERFACE
8.1 Mechanical Interface
Conveyor height
● 900 ±20 mm (Standard for Japan, China and Southeast Asia)
950 ±20 mm (Option for Europe and the U.S.A.)
、(Standard for EN machine only)
8.2 Electrical interfaces
8.2.1 Kinds and meanings of electrical signals
The conceptual diagram of the electrical signals both on the mounters and the other side
machines is shown in the following “Figure 11 Electrical signals connection conceptual
diagram “, as follows: The electrical signals between the mounters and upstream-side
devices ①, ② and between the mounters and downstream-side devices ③, ④ is
shown in the following diagram.
a) The electrical signal ① is called the “carryout request input signal (or PWBs
available-in),” receiving the PWBs carryout requests from the upstream-side devices.
b) The electrical signal ② is called the “carryout permit output signal (or ready-out),”
having the PWBs carried out to the upstream-side devices.
c) The electrical signal ③ is call the “carryout request output signal (or PWBs
available-out),” requesting the PWBs carryout to the downstream-side devices.
d) The electrical signal ④ is called the “carryout permit input signal (or
ready-in),“ receiving the PWBs carryout permits from the downstream-side devices.
Downstream-
side devices
Mounters
Upstream-
side devices
②
①
③
④
Figure 13 Electrical signals connection conceptual diagram
30
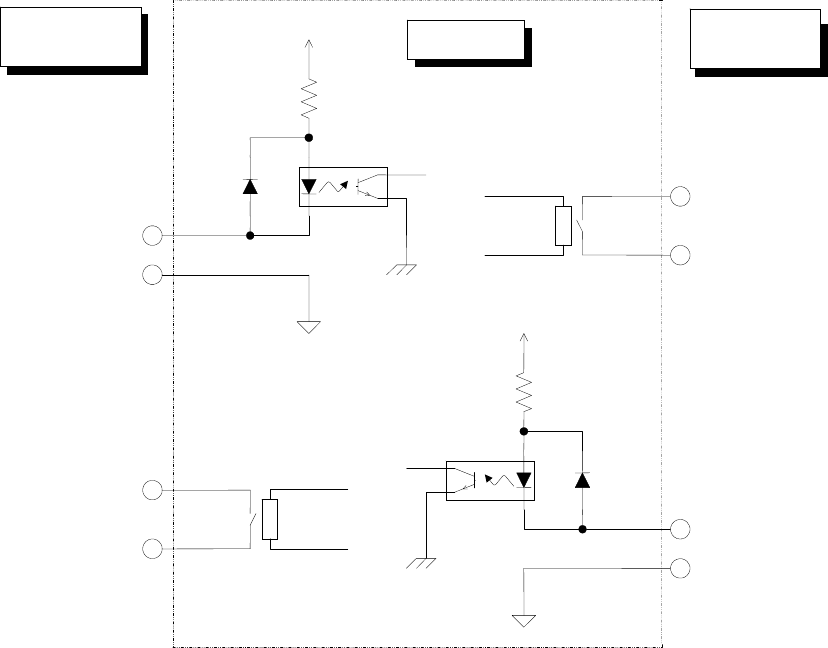
8.2.2 Input and Output Signal Interfaces
Figure 14 Signal interfaces and connection terminals
8.2.3 Connection cable specifications
A connection cable shall conform to the JIS B 8438 Industrial Robot – Electric Equipment.
The cable length shall be 10 m or less.
8.3 Data interface
● Equivalent to USB 2.0, two ports
● As data interfaces, FDD, DVD/CD-ROM, and others are connected. (USB connection,
option)
8.4 Utility Connections
● Piping joint
One-touch type piping joint plug for φ8 ×φ12
Pin No. 1 :
Carryout permit input signal
Pin No. 2 :
Carryout permit common signal
Relay contact point
Downstream-
side devices
Mounte
r
Upstream-
side devices
Pin No. 3 :
Carryout request output signal
Pin No. 4 :
Carryout request common signal
Pin No. 1 :
Carryout permit output signal
Pin No. 2 :
Carryout permit common signal
Pin No. 3 :
Carryout request input signal
Pin No. 4 :
Carryout request common signal
Relay contact point
+24V
+24V
31