NXT系列 编程手册.pdf - 第216页
PRG-NXTS-001S0 3. 元件数据 NXT 系列 编程手册 203 VT 170 使用 机械夹头时的元件有无检查处理 这个影像类型用于不能使用其他影像类型识别的元件。 在外形数据中, 将影像类型设定为 170,指定 [Lead Brightn ess] 设定,指定检查区,然 后在要素信息中选择 P 类型。根 据该 数据判定, 如果已经吸取了元件, 则将不根据影像对元件进行任何修正就进行贴装。 机械化 地定位元件。 执行影像处理…

3. 元件数据 PRG-NXTS-001S0
202 NXT 系列 编程手册
NXTPRG030S

PRG-NXTS-001S0 3. 元件数据
NXT 系列 编程手册 203
VT 170 使用机械夹头时的元件有无检查处理
这个影像类型用于不能使用其他影像类型识别的元件。在外形数据中,将影像类型设定为
170,指定 [Lead Brightness] 设定,指定检查区,然后在要素信息中选择 P 类型。根据该
数据判定,如果已经吸取了元件,则将不根据影像对元件进行任何修正就进行贴装。机械化
地定位元件。
执行影像处理后将决定在要素数据中指定的平均灰度。该平均值与引脚亮度设定进行比较,
再根据 P 类型设定来判断是否存在元件。
如果 P 类型设定是 1 (暗)并且平均灰度高于引脚亮度设定,这说明存在元件。如果平均灰
度低于引脚亮度设定,这说明不存在元件。
如果 P 类型设定为 2 (亮)并且平均灰度低于引脚亮度设定,这说明存在元件。如果平均灰
度高于引脚亮度设定,这说明不存在元件。
备注 )使用该影像类型时需要使用带有四个爪的机械爪。
3. 元件数据 PRG-NXTS-001S0
204 NXT 系列 编程手册
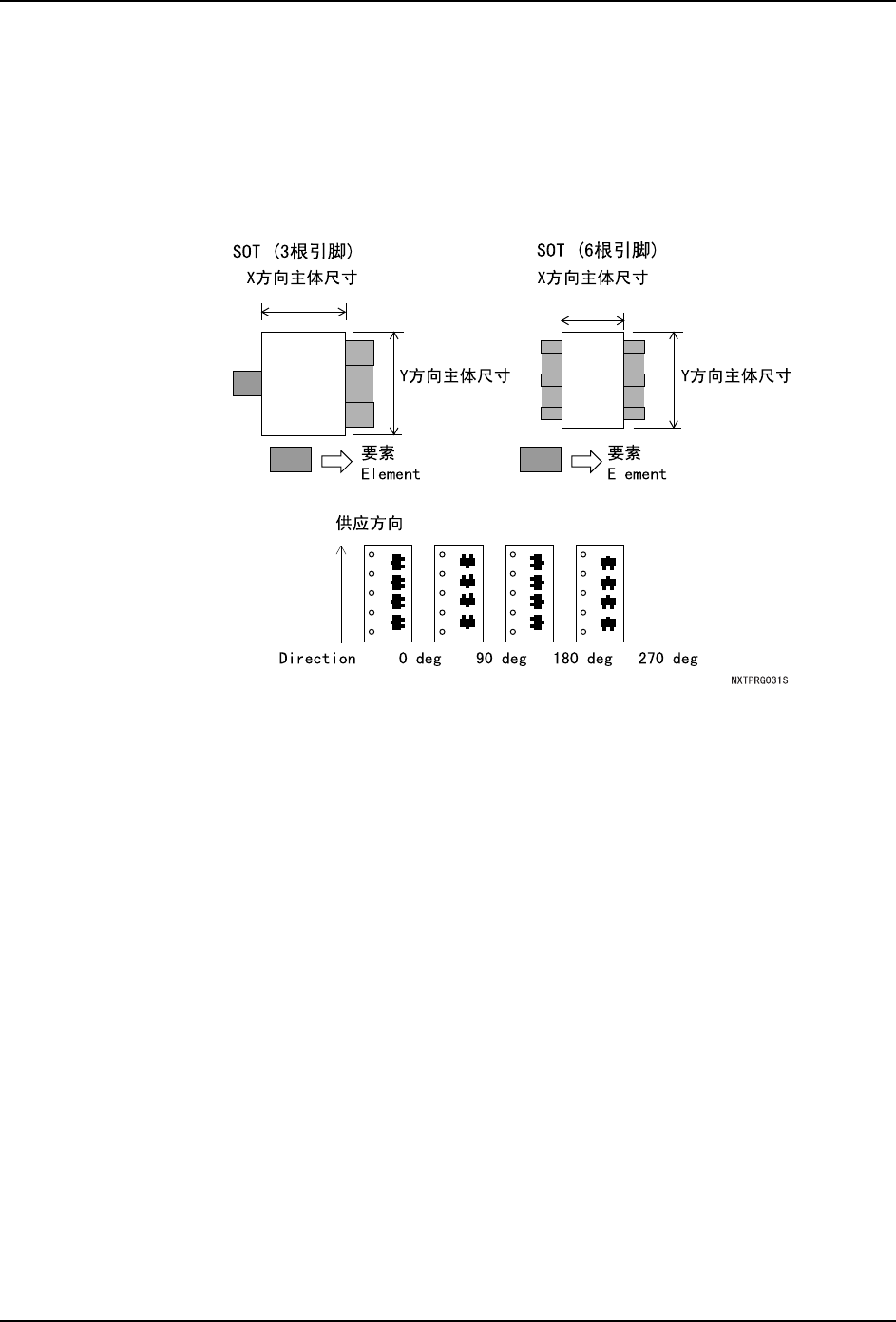
VT 180 (185) 钽电容器处理,SOT 类型元件处理
可以用于引脚数量为 2 到 6 根并且影像处理中只可看见引脚的黑色主体元件。必须输入元件
主体尺寸和要素信息。VT180 时,元件基准点是元件主体中心,VT185 时,元件基准点是元
件中心。
备注 )该影像类型可以用于引脚最多为 6 根的元件。无法对有 7 根以上引脚的元件执行影像
处理。
备注 )如果引脚对光的反射不均匀,则无法执行影像处理。