YSM系列编程手册(1).pdf - 第26页
对象读者 : 用户 SERV ICE I NFORM ATION 26 / 40 SI19120 16C -000 = 操作培训 补充 资料 < One Point > 共面度检测 的原理 共面度检测器是检查引 脚 翘起 用的相机。 识别元件用的多视觉相 机拍摄的图像是从 元件底面拍摄的, 因此 难以 检出引脚翘起的现象。 如果能从侧面识别元件 , 就可以比较容易地 判断引脚是 否翘起。 但, 从正侧面拍照 是比较 困难 的, 利用共面…
对象读者:用户
SERVICE INFORMATION
25/40
SI1912016C-000 = 操作培训补充资料
6. 盘装元件的数据创建
6.1 编辑元件数据
Step 1.
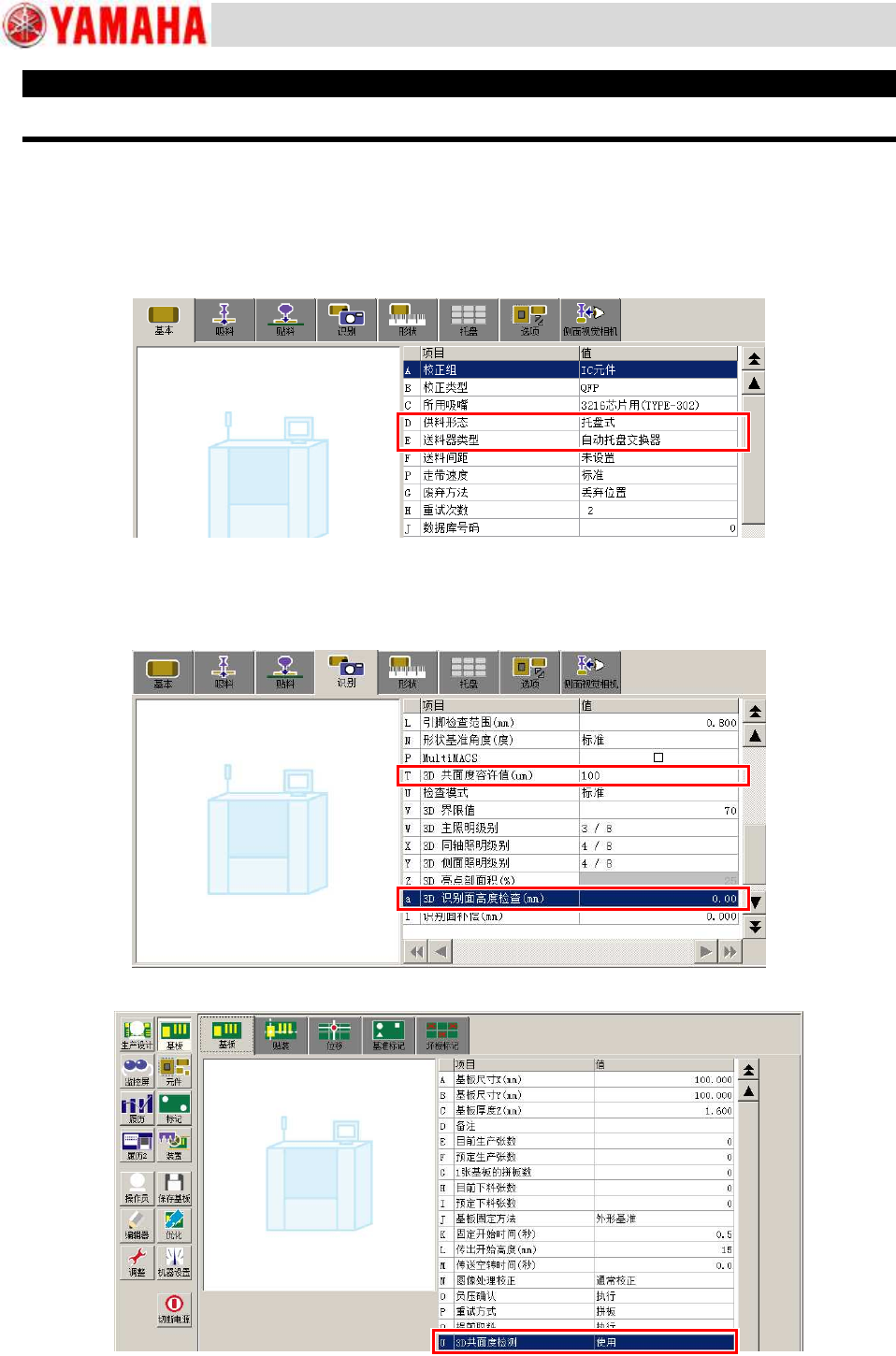
编辑元件数据的“基本”选项卡页面的项目。
D 供料形态 : 选择“托盘式”。
E 送料器类型 : 选择使用的托盘类型。
sATS、sATSII、sATS30、sATS30NS、AT15、cATS、cAST10 时,选择“自动托盘交换器”。
dYTF 时,选择“外部托盘交换器”。
Step 2.
使用共面度检测器时,编辑“识别”选项卡页面。
T 3D 共面度容许值(um) :设定引脚的共面度(引脚翘起)的容许值。
a 3D 识别面高度检查(mm) : 要对 SOP、QFP 判定正反面时设定。一般,输入元件厚度的 70%左右的厚度。
使用共面度检测器时,需将“基板”画面的“基板”选项卡页面中的“U 3D 共面度检测”设定为“使用”。
对象读者:用户
SERVICE INFORMATION
26/40
SI1912016C-000 = 操作培训补充资料
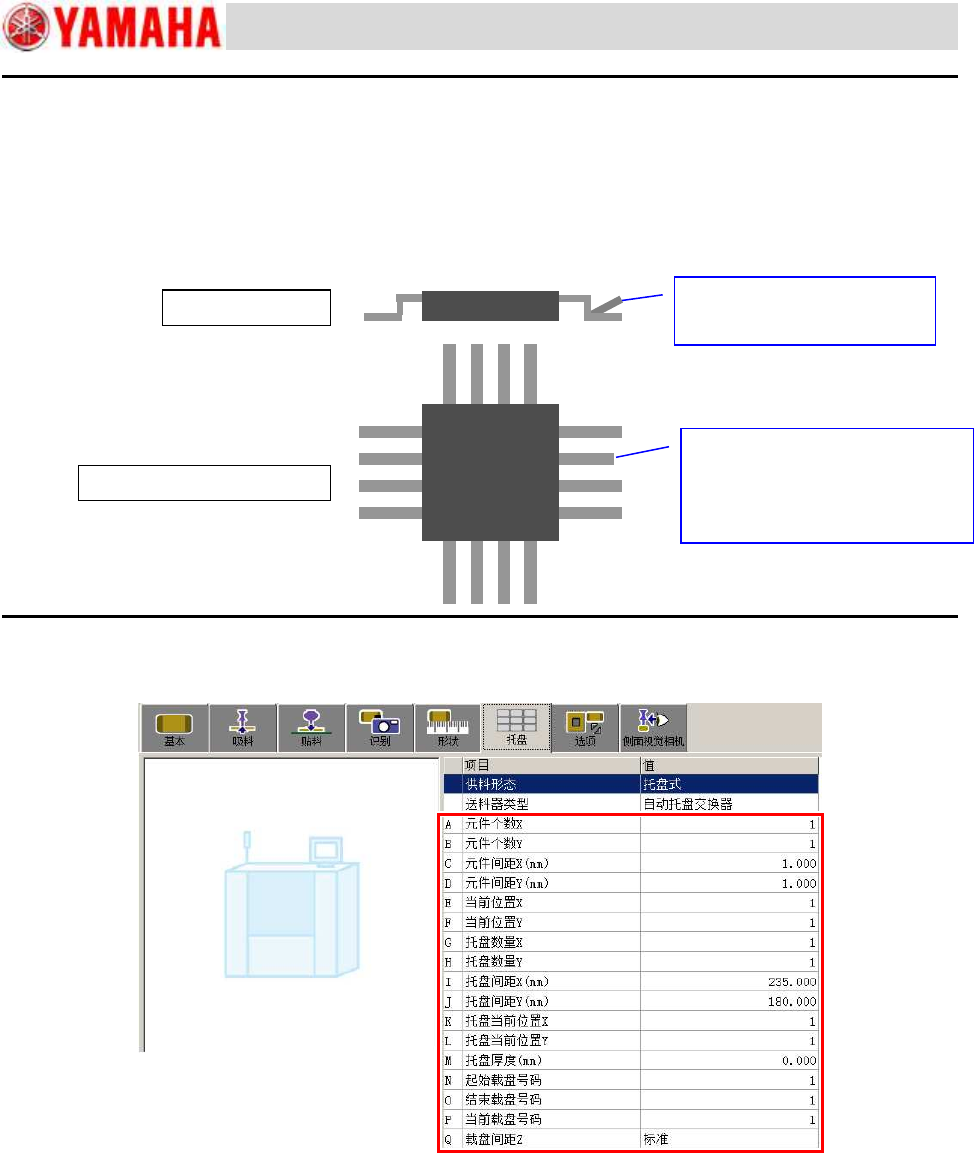
<One Point> 共面度检测的原理
共面度检测器是检查引脚翘起用的相机。识别元件用的多视觉相机拍摄的图像是从元件底面拍摄的,因此难以
检出引脚翘起的现象。
如果能从侧面识别元件,就可以比较容易地判断引脚是否翘起。但,从正侧面拍照是比较困难的,利用共面度
检测器从斜向对引脚拍照亦可比较容易地检出引脚翘起。
Step 3.
编辑“托盘”选项卡页面的项目。
A、B 元件个数 XY:指定一个托盘中所装的元件个数。
C、D 元件间距 XY:指定托盘中的元件的间距。
E、F 当前位置 XY: 指定从托盘原点开始从第几列、第几行的元件开始吸取。新建元件信息时,一般将“当前位置 X”、
“当前位置 Y”都指定为“1”。以左下的元件为原点(1、1)开始计数。
G、H 托盘数量 XY: 指定载盘上装有几张托盘。
I、J 托盘间距 XY: 输入托盘的排列间距。
K、L 托盘当前位置 XY : 指定从载盘元件开始从第几列、第几行的托盘开始吸取元件。
以左下的载盘为原点(1、1)开始计数。
QFP
只能从引脚的长度判断是否翘起,
但在元件底面的图像中,弯曲的引
脚与没有弯曲的引脚的长度几乎
没有差异,因此难以检出。
多视觉相机拍摄的元件图像
元件侧视图
如果可以从正侧面拍照会更
容易检出引脚翘起。
对象读者:用户
SERVICE INFORMATION
27/40
SI1912016C-000 = 操作培训补充资料
M 托盘厚度: 指定托盘的厚度。参考下图,计算托盘的厚度。
N、O 起始载盘号码、结束载盘号码: 设定该元件是装在载料箱的第几号到第几号的载盘中。
P 当前载盘号码: 指定从载料箱中的第几号载盘开始吸取元件。
Q: 载盘间距 Z :指定载盘是按下列哪种间距插入在载料箱中的。
・ 标准 : 标准间距。
・ × 2 : 标准间距的 2 倍。
・ × 3 : 标记间距的 3 倍。
・ × 4 : 标记间距的 4 倍。
Step 4.
将盘装元件装入托盘交换器中。
Step 5.
对吸附位置进行示教。
盘装元件的吸附位置通过“示教”指定。示教的方法,请参照前述 2.5 创建元件信息的 Step3。
对左前角的元件位置(1、1)上的元件中心进行示教。
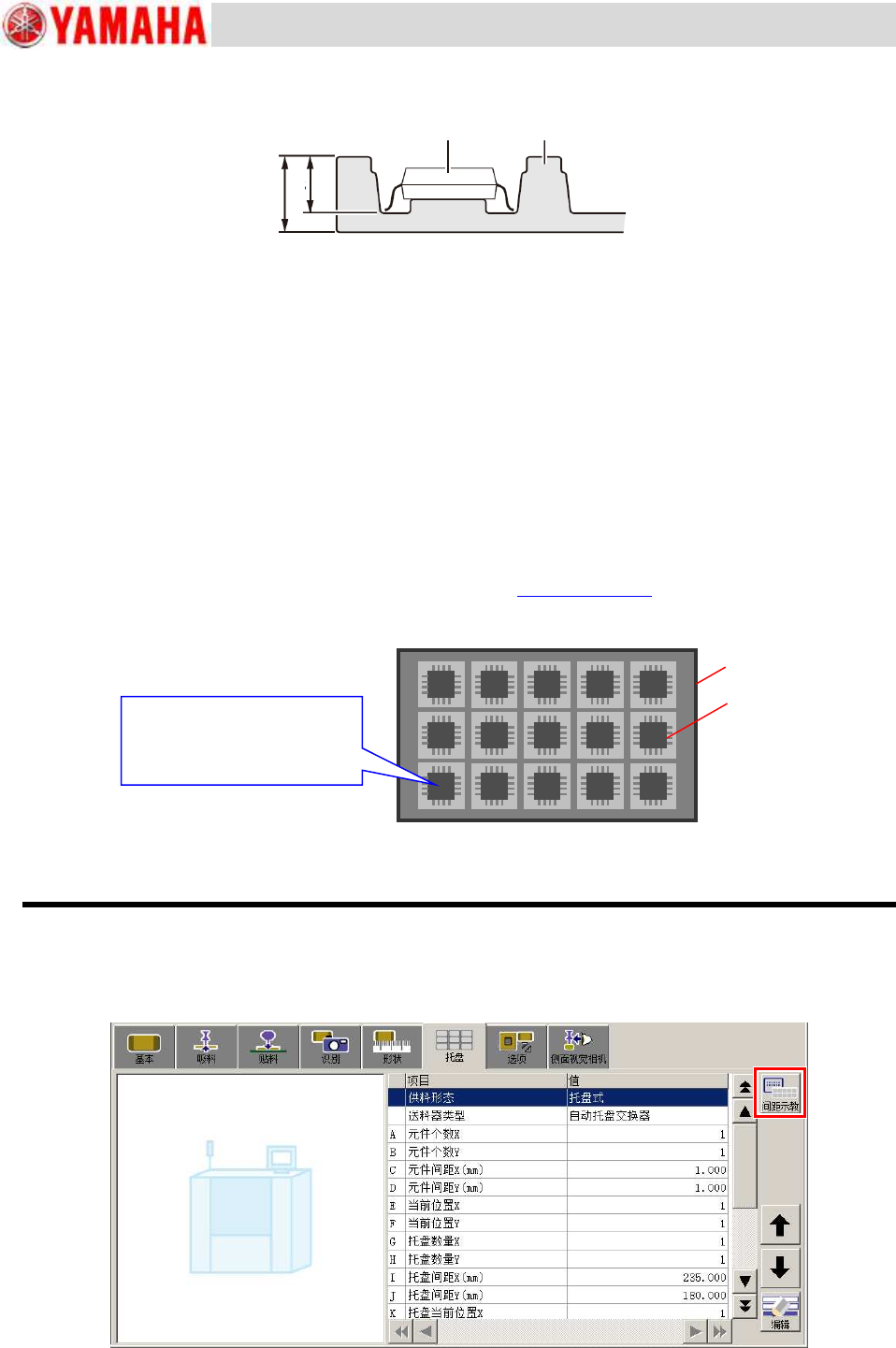
6.2 间距示教
盘装元件的元件数据可以通过“间距示教”设定托盘上的元件的 XY 方向上的间距。
Step 1.
将盘装元件装入托盘交换器中。
Step 2.
按“托盘”选项卡页面的[间距示教]按钮。
B
托盘厚度 = A-B
A
元件
托盘
元件
托盘
左前角位置为(1、1)即原点。
从此处开始 X 方向向右,Y 方
向向里开始计数。