00195940-03-UM SiplaceCA-DE.pdf - 第193页
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten Ausgabe 08/2011 DE 3.8 Bestückköpfe 193 3.8.4.3 Funktionsbeschreibung Der 12-Segment-Collect&Place-CA- Kopf b esitzt drei Achsen, die DR- oder S ternachse, die Z-…
3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.8 Bestückköpfe Ausgabe 08/2011 DE
192
Im Gegensatz zu klassischen Chipshootern rotieren die zwölf Pipetten der SIPLACE Coll-
ect&Place-CA-Köpfe um eine horizontale Achse. Das ist nicht nur platzsparend: durch den kleinen
Durchmesser treten im Vergleich zu klassischen Chipshootern wesentlich geringere Fliehkräfte
auf. So wird die Gefahr eines Verrutschens von Bauelementen während des Transport weitge-
hend gebannt.
Dazu kommt noch ein weiteres Plus: die Taktzeit des Collect&Place-CA-Kopfes ist für alle Baue-
lemente gleich. Das bedeutet, dass die Bestückleistung unabhängig von der Bauelementegröße
ist.
3.8.4.2 Control- und Selflearning-Funktionen
Control- und Selflearning-Funktionen steigern die Zuverlässigkeit des 12-Segment-Collect&
Place-CA-Kopfes.
– Die Vertikalachse (Z-Achse) zum Abholen und Bestücken der BE arbeitet im Sensor-Stopp-
Modus. Dadurch werden Höhendifferenzen beim Abholen und Leiterplattenunebenheiten
beim Bestücken ausgeglichen. Der Durchschnitt der Abweichungen bei den letzten 10 Be-
stückvorgängen wird für die Anpassung der weiteren Hub- und Bestückgeschwindigkeit
ebenfalls berücksichtigt. Die programmierte Aufsetzkraft bleibt indes immer konstant.
– Vakuumprüfungen an den Pipetten zeigen an, ob das Bauelement korrekt abgeholt oder ab-
gesetzt wurde.
– Zur Erhöhung der Bestücksicherheit kann ein Bauelementesensor am C&PCA-Kopf installiert
werden. Der BE-Sensor überprüft neben der Anwesenheit des BE an der Pipette auch das
Kantenverhältnis der Bauelemente. Auf diese Weise wird ermittelt, ob das Bauelement quer
oder hochkant von der Pipette aufgenommen worden ist.
– Des weiteren wird auch die Gehäuseform überprüft. Weichen die ermittelten geometrischen
Daten von den programmierten Daten ab, wird das Bauelement nicht bestückt.
– Eine digitale BE-Kamera am Bestückkopf bestimmt die genaue Lage jedes BE an der Pipette.
Mit der Standardkamera können Bauelemente der Größe 0,5 mm x 0,5 mm bis
18,7 mm x 18,7 mm optisch zentriert werden. Abweichungen von der Abholposition werden
bereits vor dem Bestücken korrigiert. Beim Abholen eines Bauelements wird der Durchschnitt
der Abweichungen bei den letzten 10 Bestückvorgängen berücksichtigt. So wird die Abhol-
genauigkeit weiter erhöht.
– Mit Hilfe einer optionalen, hoch auflösenden BE-Kamera kann der 12-Segment-
Collect&Place-CA-Kopf Bauelemente der Größe 0,4 mm x 0,2 mm bis 18,7 mm x 18,7 mm
optisch zentrieren und bestücken. Beim Bestücken von High-Speed-, Flip-Chip- und Bare-
Die-Bauelementen optimiert die hoch auflösende Digitalkamera die Geschwindigkeit und die
Genauigkeit. Die Werte finden Sie in der Tabelle auf Seite 194
.
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ausgabe 08/2011 DE 3.8 Bestückköpfe
193
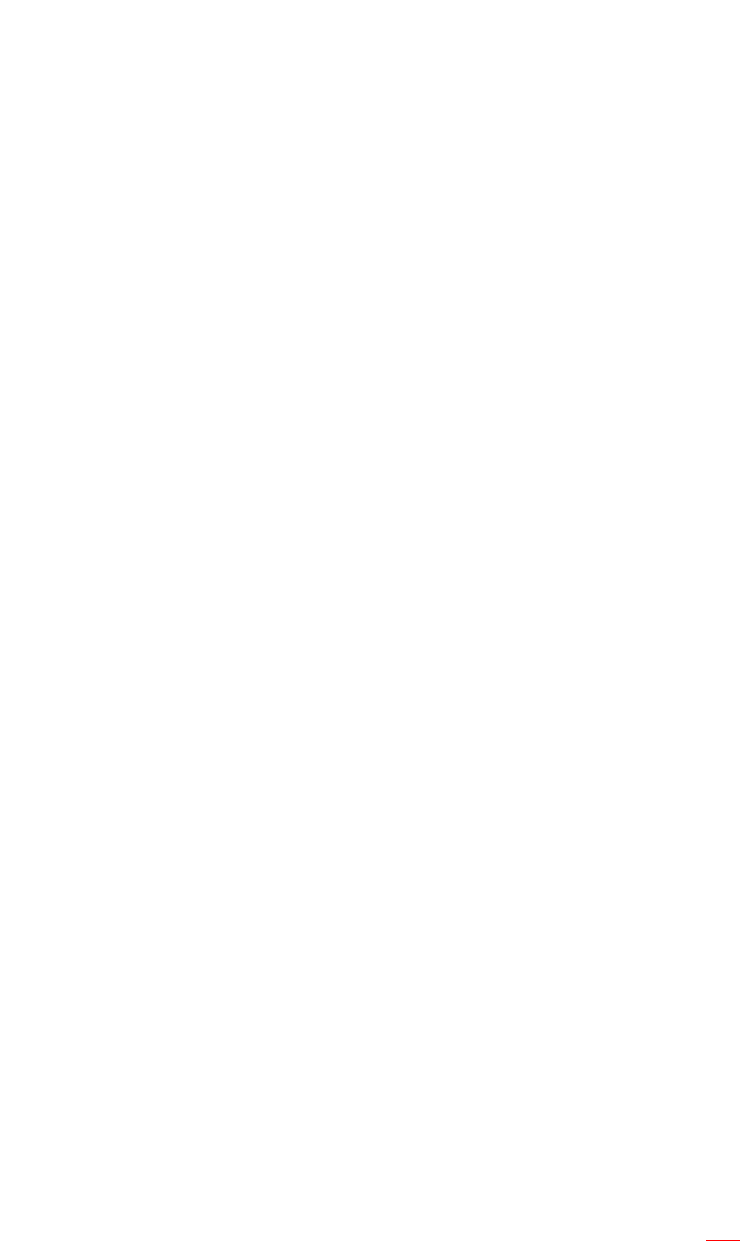
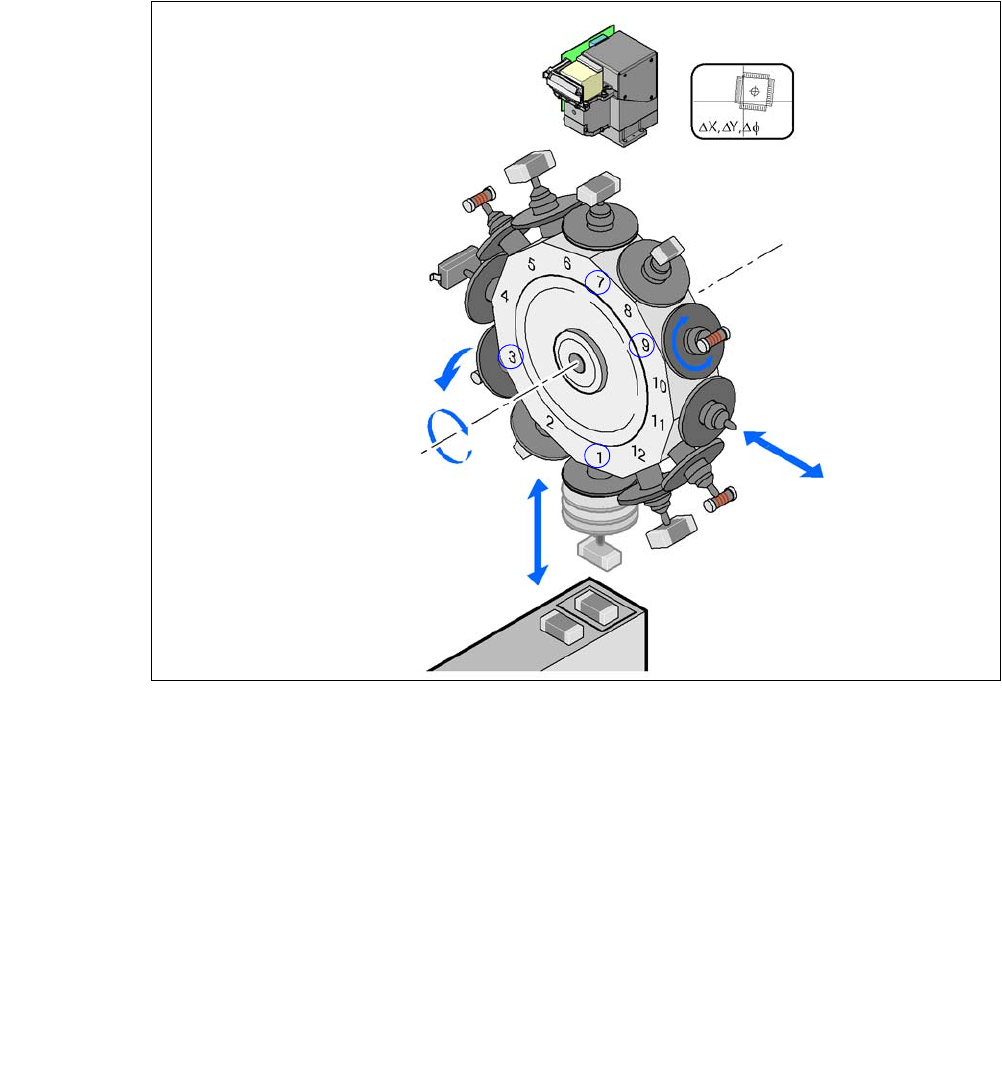
3.8.4.3 Funktionsbeschreibung
Der 12-Segment-Collect&Place-CA-Kopf besitzt drei Achsen, die DR- oder Sternachse, die Z- und
die DP-Achse.
3
Abb. 3.8 - 8 Funktionsbeschreibung
Der Stern rotiert mit seinen 12 Segmenten um die Stern-Achse. Die Segmente sind Träger der
Pinolen. Auf jeder Pinole sitzt eine Pipette. Damit werden die Bauelemente angesaugt und von
der Abhol-/Bestückposition (1), zur Abwurfposition (3), zur optischen Zentrierposition (7) oder zur
Drehposition (9) transportiert.
Die Z-Achse führt eine Vertikalbewegung aus. Jede Pinole, die sich in der untersten Stellung des
Sterns befindet (1), wird von dieser Achse angehoben oder abgesenkt. Damit werden die Bau-
elemente von den Zuführmodulen abgeholt und auf die Leiterplatte abgesetzt. Die Z-Achse ist
eine so genannte „intelligente Achse“. Sie „merkt sich“ die Abholhöhe einer jeden Zuführmodul-
Spur und die Bestückhöhe für jedes Bauelement. So lässt sich der Bestückprozess beschleuni-
gen. Die programmierte Aufsetzkraft bleibt konstant.
Die DP-Achse dreht das optisch zentrierte Bauelement in die gewünschte Bestücklage.
BE-Kamera
DP-Achse
BE in Bestück-
lage drehen
Pinole abziehen
oder einsetzen
Z-Achse
BE abholen
oder bestücken
Stern-Achse
Sternrotation
BE abwerfen
3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.8 Bestückköpfe Ausgabe 08/2011 DE
194
Die Bewegungsabläufe der Rotations- und auch der Translationsachsen werden von Regelkrei-
sen gesteuert. Sensoren für Position und Geschwindigkeit übermitteln die Istwerte der Achsbe-
wegung an die Achsansteuerung. Aus dem Vergleich der Soll- und Istwerte werden die Kraft- und
Geschwindigkeitsparameter für die Servoverstärker und somit die auszuführende Achsbewegung
ermittelt. Die Vakuumwerte an der Pipette werden während des gesamten Abhol- und Bestück-
prozesses ständig elektronisch kontrolliert, um die Bestückfehlerrate möglichst gering zu halten.
3.8.4.4 Technische Daten
3
12-Segment-Collect&Place-CA-Kopf mit hoch auflösen-
der BE-Kamera, Typ 29, 27 x 27, digital
(siehe Abschnitt 7.12, Seite 474)
BE-Spektrum
a
a) Beachten Sie bitte, dass das bestückbare BE-Spektrum auch von den Pad-Geometrien, den kundenspezifischen
Standards und den BE-Verpackungstoleranzen beeinflusst wird.
0201
b
bis Flip-Chip, Bare-Die, PLCC44, BGA, µBGA,
TSOP, QFP, SO bis SO32, DRAM
b) Mit 0201-Paket
BE-Spezifikation
max. Höhe
min. Beinchenraster
min. Beinchenbreite
min. Ballraster
min. Balldurchmesser
min. Abmessungen
max. Abmessungen
max. Gewicht
6 mm
0,3 mm
0,15 mm
0,13 mm
0,08 mm
0,6 mm x 0,3 mm
18,7 mm x 18,7 mm
2 g
Pipettentypen 9xx
X/Y-Genauigkeit (SMD)
± 41 µm/3± 55 µm/4
X/Y-Genauigkeit (CA) ± 25 µm/3, ± 33 µm/4
Winkelgenauigkeit
± 0,5°/3, ± 0,7°/4