00195940-03-UM SiplaceCA-DE.pdf - 第202页
3 Technische Daten Betriebsanleitung SIPLACE CA-Ser ie 3.8 Bestückköpfe Ausgabe 08/2011 DE 202 Die DP-Achse dreh t das optisc h zentrierte Bauelement in die gewünsch te Bestücklage . Die Dreh- achse wird von eine m Schri…

Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ausgabe 08/2011 DE 3.8 Bestückköpfe
201
3.8.6.1 Beschreibung
Dieser hoch entwickelte Bestückkopf besteht aus zwei aneinander gekoppelten Bestückköpfen
gleicher Bauart (Zwillingskopf), die nach dem Pick&Place-Prinzip arbeiten. Der TwinHead eignet
sich zur Verarbeitung besonders anspruchsvoller und großer Bauelemente. Zwei Bauelemente
werden vom Bestückkopf abgeholt, auf dem Weg zur Bestückposition optisch zentriert und in die
erforderliche Bestücklage gedreht. Danach werden sie mit Hilfe von geregelter Blasluft sanft und
positionsgenau auf die Leiterplatte gesetzt.
Für den TwinHead wurden neue Pipetten (Typ 5xx) entwickelt. Mit einem Adapter lassen sich aber
auch die Pipetten des Pick&Place-Kopfes vom Typ 4xx und die Pipetten der Collect&Place-CA-
Köpfe vom Typ 8xx und 9xx verwenden.
Control- und Selflearning-Funktionen 3
Verschiedene Control- und Selflearning-Funktionen steigern die Zuverlässigkeit des TwinHead.
– Vakuumprüfungen an den Pipetten zeigen beispielsweise an, ob das Bauelement korrekt ab-
geholt oder abgesetzt wurde.
– Die vorgegebenen Aufsetzkräfte für die Bauelemente werden von einem Kraftsensor gemes-
sen und überwacht.
– Hoch auflösende, intelligente Visionmodule wie z. B. Finepitch und Flip-Chip Visionmodule –
stellen geringste Abweichungen der BE-Position fest, korrigieren diese und garantieren damit
eine korrekte Bestückposition. Die BE-Kameras sind stationär am Maschinenrahmen befes-
tigt.
– Auch die Gehäuseform des Bauelements wird überprüft. Weichen die ermittelten geomet-
rischen Daten von den programmierten Daten ab, wird das Bauelement nicht bestückt.
– Bei Druckluft- oder Stromausfall wird die vertikale Achse (Z-Achse) in eine sichere Position
angehoben, um einen Kopfcrash zu vermeiden.
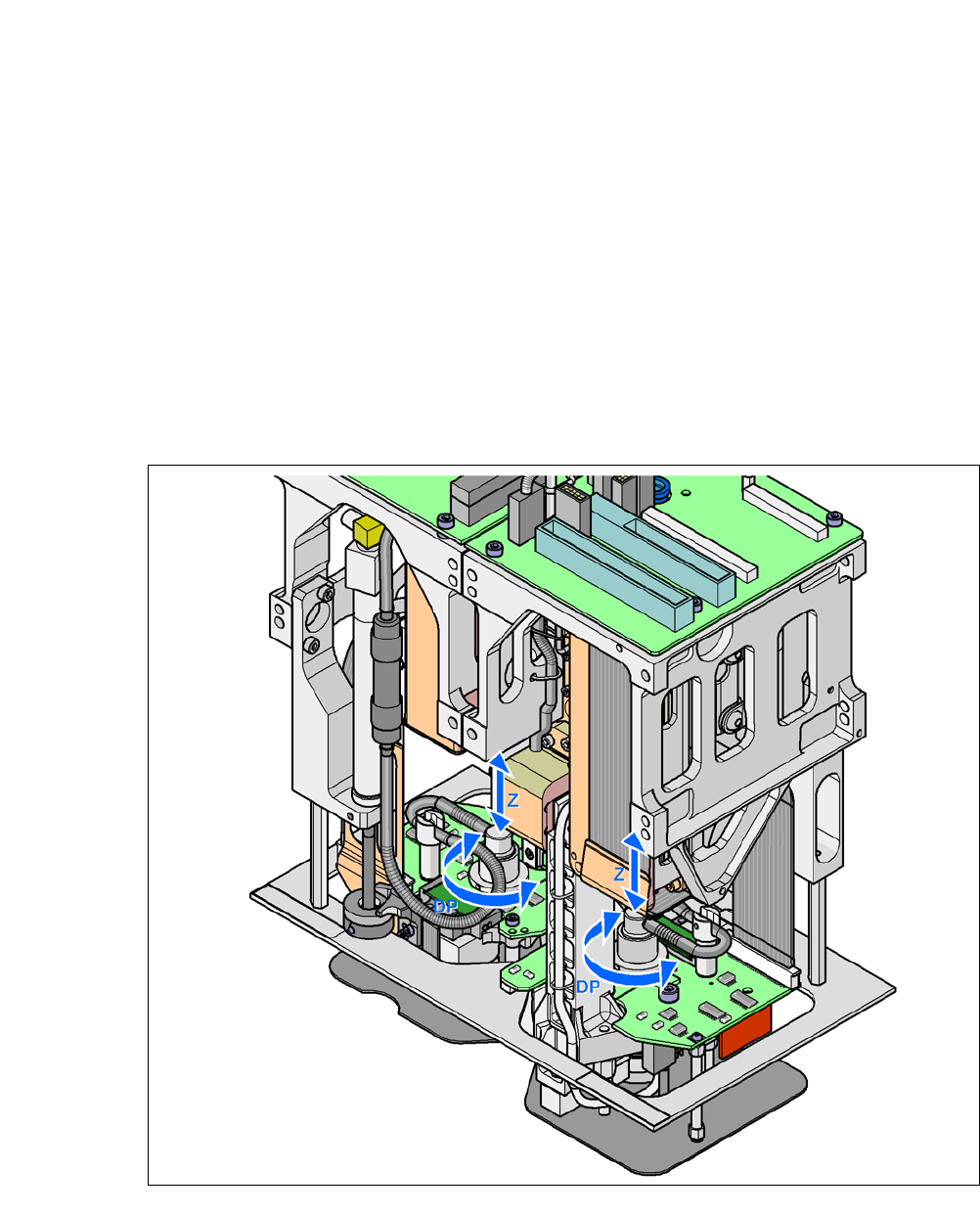
3.8.6.2 Funktionsbeschreibung
Der TwinHead besteht aus zwei aneinander gekoppelten Pick&Place-Köpfen, die voneinander
unabhängig angesteuert werden. Jeder Kopf besitzt zwei Achsen, die Z- und die DP-Achse (siehe
Abb. 3.8 - 11
).
Der Verfahrweg der Z-Achse wird über ein hoch auflösendes, lineares Inkrementalmesssystem
erfasst. Die Z-Achse führt eine Vertikalbewegung aus. Ein Linearmotor hebt und senkt die Z-
Achse. Damit werden Bauelemente aus Zuführmodulen bzw. Trays abgeholt und auf die Leiter-
platte abgesenkt. Die Z-Achse ist eine so genannte „intelligente“ Achse. Sie „merkt sich“ die Ab-
holhöhe für Zuführmodule und Trays und die Bestückhöhe für jedes Bauelement. So lässt sich der
Bestückprozess beschleunigen. Die programmierte Aufsetzkraft wird von einem Kraftsensor ge-
messen und überwacht.
3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.8 Bestückköpfe Ausgabe 08/2011 DE
202
Die DP-Achse dreht das optisch zentrierte Bauelement in die gewünschte Bestücklage. Die Dreh-
achse wird von einem Schrittmotor angetrieben. Die Motorwelle ist als Pinolenrohr ausgebildet.
Am oberen Ende ist die Inkrementalscheibe für die Winkelauswertung befestigt, am unteren Ende
befindet sich die Aufnahmevorrichtung für die Pipette.
Die Bewegungsabläufe der Rotations- und auch der Translationsachsen werden von Regelkrei-
sen gesteuert. Sensoren für Position und Geschwindigkeit übermitteln die Istwerte der Achsbe-
wegung an die Achsansteuerung. Aus dem Vergleich der Soll- und Istwerte werden die Kraft- und
Geschwindigkeitsparameter für die Servoverstärker und somit die auszuführende Achsbewegung
ermittelt.
Die Vakuumwerte an der Pipette werden während des gesamten Abhol- und Bestückprozesses
ständig elektronisch kontrolliert, um die Bestückfehlerrate möglichst gering zu halten.
3
Abb. 3.8 - 13 Funktionsbeschreibung
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ausgabe 08/2011 DE 3.8 Bestückköpfe
203
3.8.6.3 Technische Daten
Optische Zentrierung mit
Einschränkung:
Das SWS ist nicht mit dem
TwinHead kombinierbar.
BE-Kamera, stationär,
P&P (Typ 33) 55 x 45, digital
(siehe Abschnitt 3.13.5, Seite 225)
BE-Kamera, stationär,
P&P (Typ 25) 16 x 16, digital
(siehe Abschnitt 7.4, Seite 459)
BE-Spektrum
a
a) Beachten Sie bitte, dass das bestückbare BE-Spektrum auch von den Pad-Geometrien, den kundenspezifischen
Standards und den BE-Verpackungstoleranzen beeinflusst wird.
0402 bis SO, PLCC, QFP, BGA,
Sonder-BE, Bare-Die, Flip-Chip
0201 bis SO, PLCC, QFP, Sockel,
Stecker, BGA, Sonder-BE, Bare-
Die, Flip-Chip, Shield
BE-Spezifikation
max. Höhe
min. Beinchenraster
min. Beinchenbreite
min. Ballraster
min. Balldurchmesser
min. Abmessungen
max. Abmessungen
max. Gewicht
25 mm (höher auf Anfrage)
0,3 mm
0,15 mm
0,35 mm
0,2 mm
1,0 mm x 0,5 mm
55 mm x 45 mm (Einfachmessung)
Bei Betrieb mit zwei Pipetten
50 mm x 50 mm oder
69 mm x 10 mm
Bei Betrieb mit einer Pipette:
85 mm x 85 mm oder
125 mm x 10 mm
max. 200 mm x 125 mm (mit Ein-
schränkungen)
100 g
b
b) Bei Verwendung von Standardpipetten
25 mm (höher auf Anfrage)
0,25 mm
0,1 mm
0,14 mm
0,08 mm
1,0 mm x 0,5 mm
16 mm x 16 mm (Einfachmessung)
100 g
b
Programmierbare Aufsetzkraft 1,0 N - 15 N
2,0 N - 30 N
c
c) SIPLACE High-Force Head, Abschnitt 7.3, Seite 458.
1,0 N - 15 N
2,0 N - 30 N
c
Pipettentypen 5 xx (Standard)
4 xx + Adapter
8 xx + Adapter
9 xx + Adapter
5 xx (Standard)
4 xx + Adapter
8 xx + Adapter
9 xx + Adapter
Pipettenabstand der beiden
Pick&Place-Köpfe
70,8 mm 70,8 mm
X/Y-Genauigkeit (SMD)
± 26 µm/3, ± 35 µm/4
± 22 µm/3, ± 30 µm/4
Winkelgenauigkeit
± 0,05° / 3, ± 0,07° / 4
± 0,05° / 3, ± 0,07° / 4