AOIGUI_ProgrammingManual_CHN.pdf - 第136页
K oh Y oung Technolo g y Inc. 136 确认 R OI 编辑模式 : By Mouse 可测量在 ROI 内元件弯曲。用该弯曲,可 测量整个元件的高度差异。当选择 By Mouse 时, 可用鼠标编辑测量倾斜率的 ROI 。 ➢ Parameter - Check Effective Height Range: 选择 On 时可以设置 Min Height Range 和 Max Height Ran g…

Koh Young Technology Inc.
135
➢ Tolerance
良品距离最大偏移(单位):输入以Percent(%)或Metric(um)为单位的极限值
当使用百分比单位时,封装的长度信息为100%。
良品旋转最大偏移(单位):输入以Angle(degree)或Skew(um)为单位的极限值
本体 – 翘起 (Coplanarity)
➢ Inspection Mode
设置3D方式显示检查条件: 要选择Full3D
模式
- Cross
长度差极限值[um]: 输入可容许的最大容许值
宽度差极限值[um]: 输入可容许的最大容许值
- Corner
极限值[um]: 输入可容许的最大容许值.
- Cross + Corner
长度差极限值[um]: 输入可容许的最大容许值
宽度差极限值[um]: 输入可容许的最大容许值
极限值[um]: 输入可容许的最大容许值
➢ Tolerance
高度差极限值: 输入可容许的最大容许值
➢ ROI
确认ROI编辑模式: By Keyboard
元件本体与ROI的平均高度相比较,其结果应位于高度的最大值和最小值之内。ROI的尺寸取
决于封装的尺寸。
判定
本体高度差异的极限值为最大公差。如果测量结果(如3um)大于条件(如,100um),则被视为翘
起(Coplanarity)不良。
Good ≤极限值< NG
结果 3 um / 100 um Good
结果 111.35 um / 100 um Bad

Koh Young Technology Inc.
136
确认ROI编辑模式: By Mouse
可测量在ROI内元件弯曲。用该弯曲,可测量整个元件的高度差异。当选择By Mouse时,
可用鼠标编辑测量倾斜率的ROI。
➢ Parameter
- Check Effective Height Range: 选择On时可以设置Min Height Range和Max Height Ran
ge,在特定范围内进行更有效的检测。
- 使用本体偏位: 选择是否使用本体偏位。
Koh Young Technology Inc.
137
各元件引脚的基本模式和检测位置可在AOI GUI PreSet选项卡上设置。在本程序中也可生成各元件引脚
不良类型的检测公差或算法。元件引脚的Tip Location模式可在PreSet选项卡上设置。本节讲述LeadTip
Location设置的详细程序。
预设置(默认设置)
引脚定位(Lead Finding)
引脚末端定位模式
- Auto: Auto选项适用于偏平形状的引脚。利用焊盘区域的高度和亮度信息,自动找出引
脚末端(Tip)。为了正常工作,引脚形状必须偏平。
- Semi Auto: 因Solder Joint不到引脚,容易找出引脚-Joint的边际时,适用Semi Auto选
项。
引脚类型: 从L、J、V 类型中选一
去除本体以外区域: 选择是否使用本体钢网
使用本体偏位: 选择是否使用本体偏位
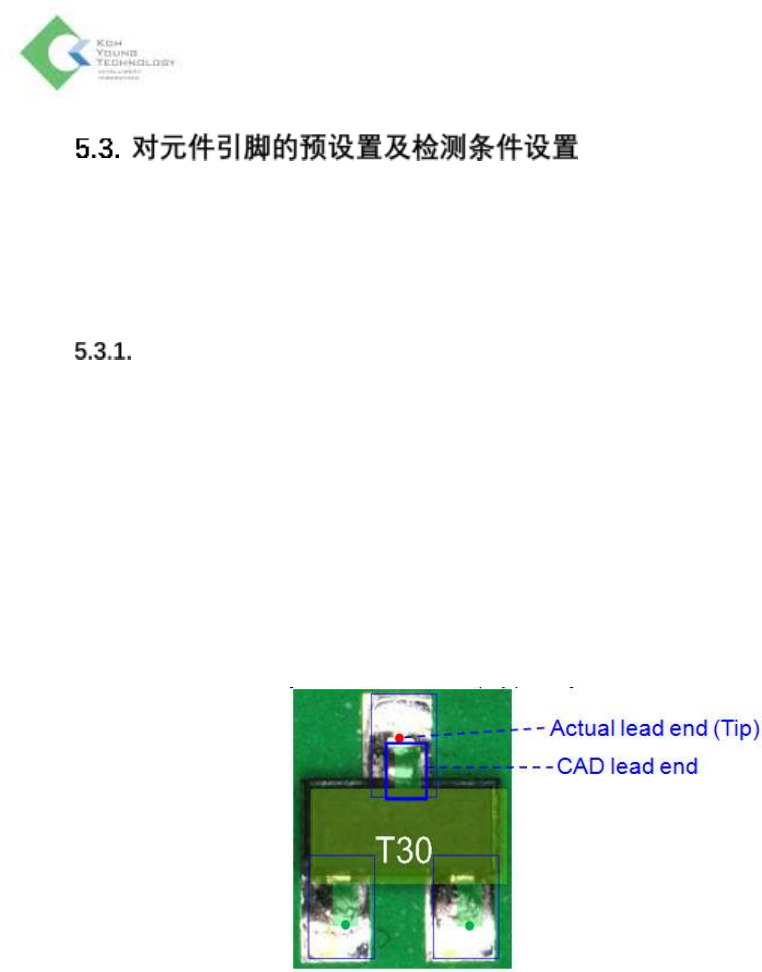
- CAD Define: CAD Define选项适用于以下情况: 当难以区分引脚末端(Tip)与Joint时
红点: 实际引脚末端/ 红点下边的绿色矩形: CAD的引脚末端
当Solder Joint盖上引脚时 [SOT]
当引脚过短或不存在时[Diode] [Melf /LED] [Arrays/QFN]
Tip Location十分重要,是因为Tip Location对以下不良类型具有极大的影响。
- 偏位(Pad Overhang): 测量各引脚的基准位置(CAD)与测量位置之间的差异,以这差异
为基准测量和检测偏位。
- 上锡(Solder Fillet): 以引脚末端的测量位置为基准,自动移动和生成Solder Fillet检测的
ROI。