RS-1 使用说明书 用户使用 Rev01.pdf - 第367页
第 1 部 基本篇 第 4 章 制作生产程序 4- 65 ③ 识别中心偏移 量 图像定心是通 过将吸取中心位置 ( 通 常是元件中心位 置 ) 移动到 VCS 的中心位置来进行。 但 像 MCM(Multi Chip Module) 之类的元件,因 不能吸取元件中 心,如果超出 VCS 视野 范围时,将不 能进行图像定心 。此时,可通过 输入 下一页示例 的偏移值 (a 、 b) , 使之正常进行识 别。 输入示例 识别 中心偏移 ( …
第 1 部 基本篇 第4 章 制作生产程序
4-64
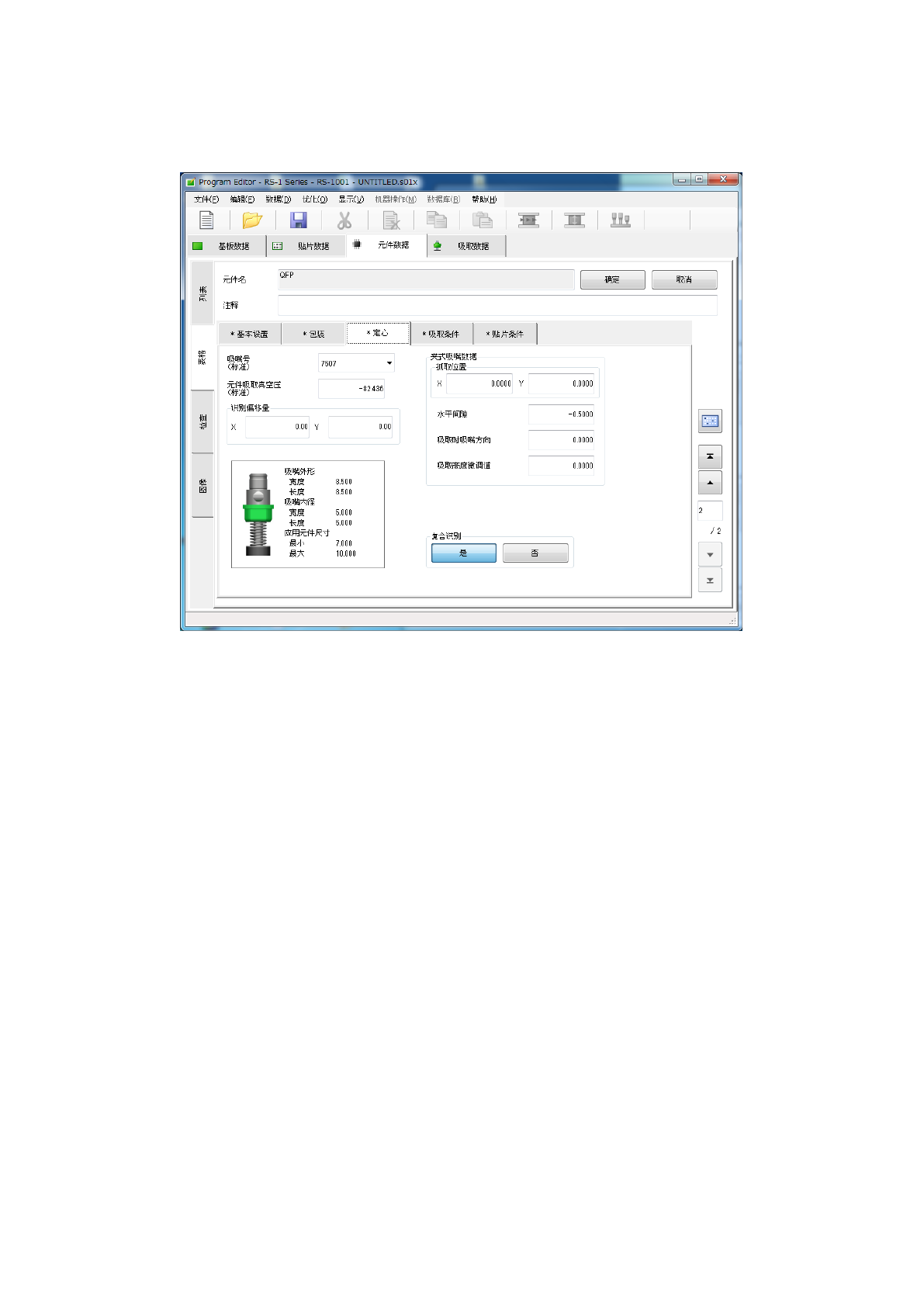
2) 图像定心时
选择定心选项卡,即显示如下画面。
① 吸嘴号
② 元件吸取真空压
与 「( 1)激光定心时」的设置相同。
第 1 部 基本篇 第4 章 制作生产程序
4-65
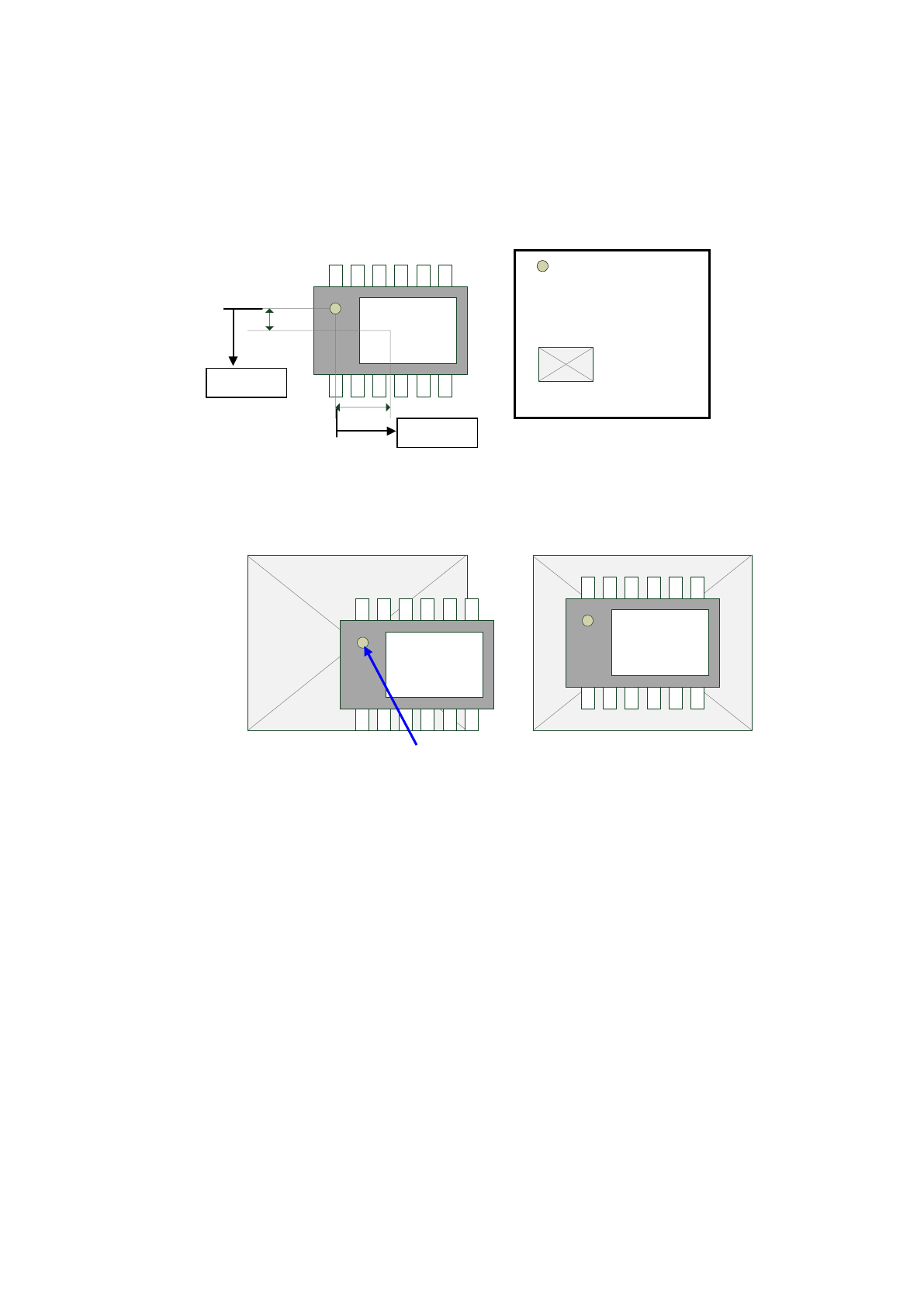
③ 识别中心偏移量
图像定心是通过将吸取中心位置(通常是元件中心位置)移动到 VCS 的中心位置来进行。但像
MCM(Multi Chip Module)之类的元件,因不能吸取元件中心,如果超出 VCS 视野范围时,将不
能进行图像定心。此时,可通过输入下一页示例的偏移值(a、b),使之正常进行识别。
输入示例
识别中心偏移(0,0)时 识别中心偏移(5,-2)时
④ 夹式吸嘴数据
与 「( 1)激光定心时」的设置相同。
⑤ S-VCS
设定是否执行 S-VCS 识别。
+
a
b
:
:吸取中心位置
+ :元件中心位置
(a、b)=(5,-2
)
吸取中心位置=VCS 的中心位置
+
+
-Y 方向
+X 方向
:
VCS 的视野
(俯视图)
第 1 部 基本篇 第4 章 制作生产程序
4-66
⑥ 复合识别
该功能是用 54mm 视野 VCS 最多对 4 个元件同时进行拍摄、识别,以此将 VCS 识别动作的 XY 轴
移动距离和摄像次数控制到最小限度,再加上照明控制的优化,使 VCS 照相机的曝光时间缩短
到以前的 1/6 以下,图像识别的贴装生产节拍也比以前的 S-VCS 更加提高。
S-VCS 在 1 个循环内只能用同一照明实施,但用多元件识别时可以对 1~4 吸嘴和 5~8 吸嘴采用
不同的照明设置进行识别。
可进行多元件识别的元件数据有以下条件。
1. 元件尺寸□3mm~□14mm 的图像元件 (考虑吸取补正)
2. 突起高度 0.00mm
3. 识别中心补正(0.00mm, 0.00mm)
4. VCS 选择为 54mm 视野
5. 除透射照明外
6. VCS 焦点高度 0.00mm
7. 批量识别
满足上述条件就可以设定是否使用。
是否使用
内容
使用
(默认)
实施多元件识别。
不使用 即使是允许多元件识别的元件也不实施。
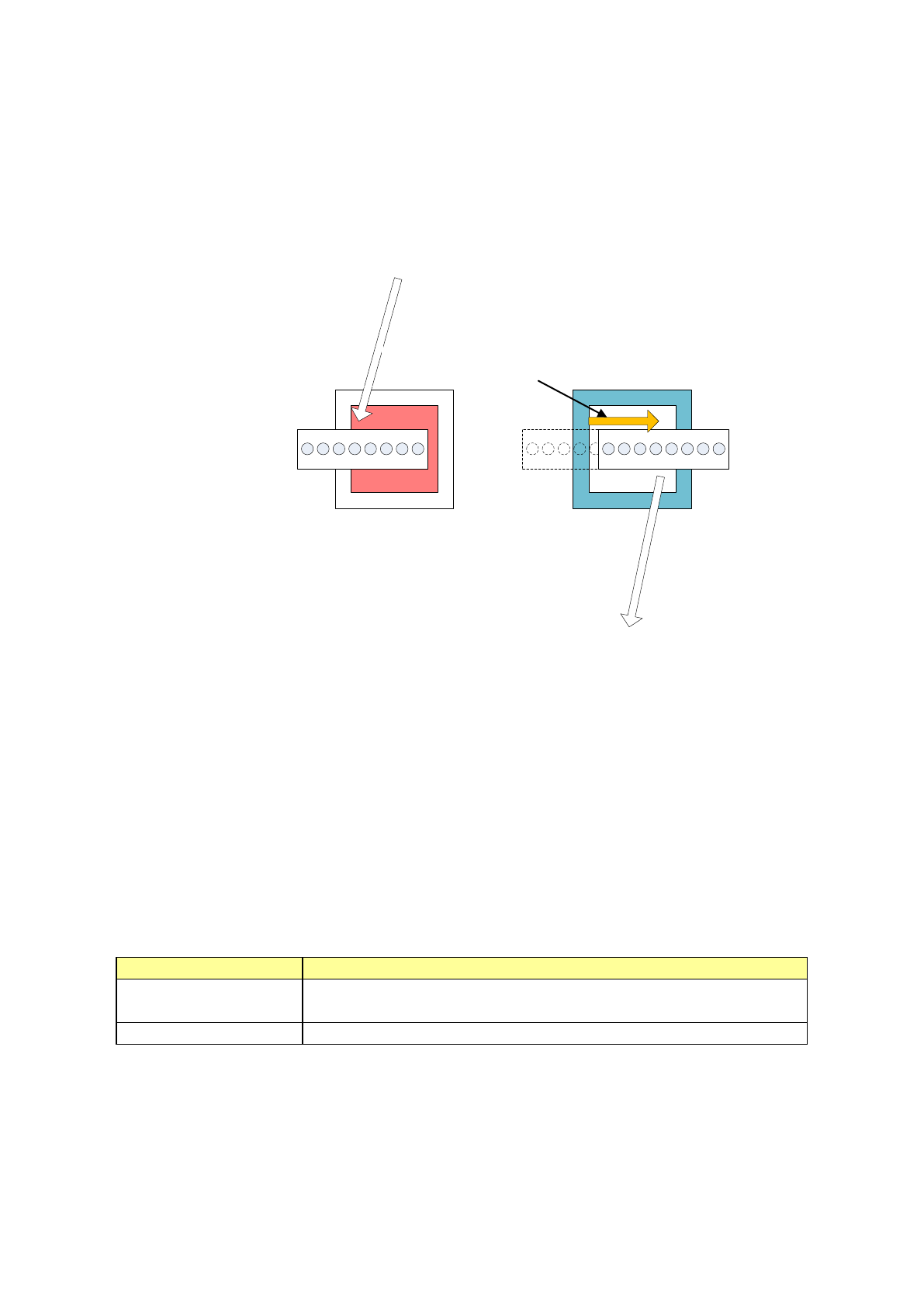
① 从吸取位置
移动到右贴装头识别位置
⑤ 从左贴装头识别位置
移动到贴片位置
② 用反射照明进行右贴装头识别
③ 从右贴装头识别位置
移动到左贴装头识别位置
④ 用蓝侧照明进行左贴
装头识别