RS-1 使用说明书 用户使用 Rev01.pdf - 第41页
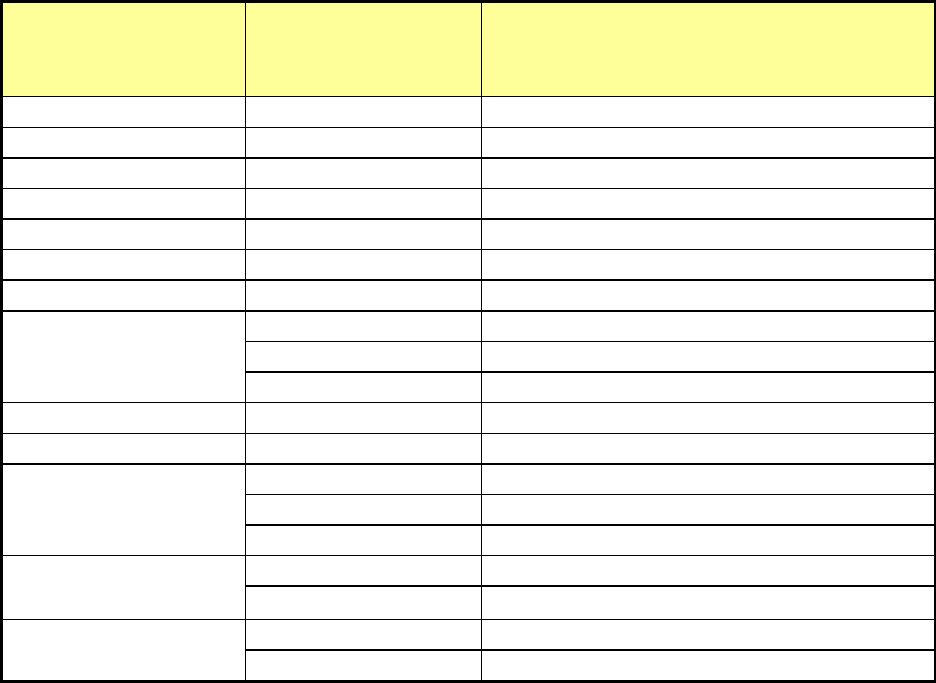
第 1 部 基本篇 第 1 章 装置概要 1- 25 ( 2 )贴片精度( θ ) 贴片精度 θ (激光识别) 单位: ° 零部件种类 元件尺寸 ※为端子间的尺 寸 LNC120 -8 0 402 方形芯片 - ± 5 (注 1 ) 0603 方形芯片 - ± 3 1005 方形芯片 - ± 2.5 1608 以上 的方形芯片 - ± 2 圆筒形芯片( Melf ) - ± 3 SOT - ± 3 铝电解电容器 - ± 10 SOP 、…
第 1 部 基本篇 第 1 章 装置概要
1-24
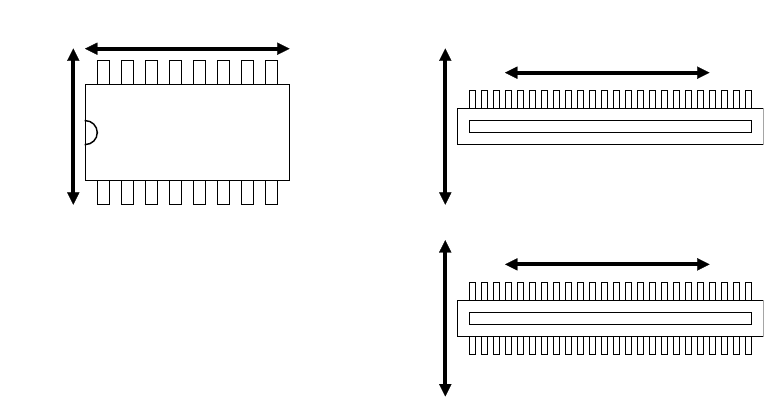
注 3: SOP 精度、单向引脚连接器、双向引脚连接器精度、分割识别对象元件的引脚直角方向、引脚平
行方向,指的是如下方向。
注 4:由于以下条件下不能进行 BGA 图像识别校正,因此除外。
① 焊锡球与焊锡球安装基板部分没有明显对比度时。( 陶瓷体的 BGA 为对象外)
② 焊锡球直径与相同粗细的图案发生连线,球无法独立识别时。
③ 在焊锡球安装的基板部位上,存在与焊锡球相同直径的过孔等时。
リード直角方向
リード直角方向
リード平行方向
リード平行方向
リード直角方向
リード平行方向
引脚直角方向
引脚直角方向
引脚直角方向
引脚平行方向
引脚平行方向
引脚平行方向
第 1 部 基本篇 第 1 章 装置概要
1-25
(2)贴片精度(
θ
)
贴片精度
θ
(激光识别)
单位: °
零部件种类
元件尺寸
※为端子间的尺寸
LNC120-8
0402
方形芯片
-
±
5
(注
1
)
0603 方形芯片 - ±3
1005 方形芯片 - ±2.5
1608
以上的方形芯片
-
±
2
圆筒形芯片(Melf) - ±3
SOT - ±3
铝电解电容器
-
±
10
SOP、TSOP
50mm
以下
±
0.30
20mm 以下 ±0.33
10mm
以下
±
0.67
PLCC
-
±
0.52
SOJ - ±0.52
QFP(间距 0.8 以上)
50mm 以下 ±0.33
30mm
以下
±
0.37
20mm 以下 ±0.44
QFP(间距 0.65)
50mm 以下 ±0.30
10mm 以下 ±0.33
BGA
(球的最外周对边距离)
50mm 以下 ±1.23
20mm 以下 ±1.28
第 1 部 基本篇 第 1 章 装置概要
1-26
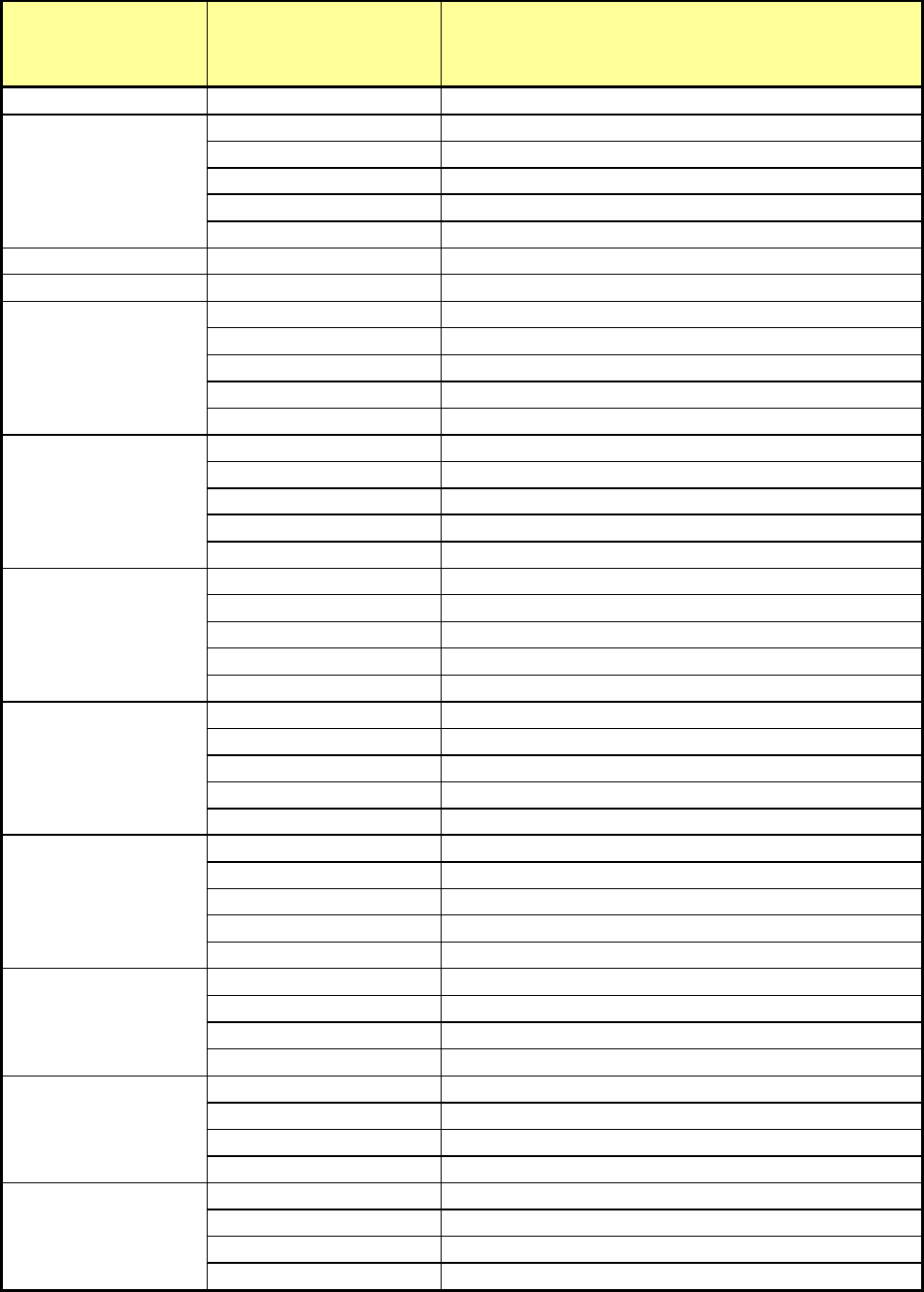
贴片精度
θ
(图像识别)
单位: °
零部件种类
元件尺寸
※为端子间的尺寸
图像识别
铝电解电容器 - ±0.6
SOP、TSOP
50mm 以下 ±0.12
40mm 以下 ±0.15
30mm 以下 ±0.21
20mm 以下 ±0.31
10mm 以下 ±0.65
PLCC - ±0.3
SOJ - ±0.5
QFP
(间距 0.65 以上)
50mm 以下 ±0.05
40mm 以下 ±0.07
30mm 以下 ±0.1
20mm 以下 ±0.2
10mm 以下 ±0.3
QFP
(间距 0.5、0.4、0.3
)
50mm 以下 ±0.05
40mm 以下 ±0.07
30mm 以下 ±0.1
20mm 以下 ±0.2
10mm 以下 ±0.3
双向引脚连接器
(间距 0.5)
50mm 以下 ±0.05
40mm 以下 ±0.07
30mm 以下 ±0.1
20mm 以下 ±0.2
10mm 以下 ±0.3
单向引脚连接器
(间距 0.5)
50mm 以下 ±0.12
40mm 以下 ±0.15
30mm 以下 ±0.21
20mm 以下 ±0.31
10mm 以下 ±0.65
分割识别对象元件
150mm 以下 ±0.065
100mm 以下 ±0.09
75mm 以下 ±0.1
50mm 以下 ±0.2
30mm 以下 ±0.3
BGA
(球最外周对边距离)
50mm 以下 ±0.1
40mm 以下 ±0.12
30mm 以下 ±0.18
20mm 以下
±0.3
FBGA
(球最外周对边距离)
50mm 以下
±0.1
40mm 以下
±0.12
30mm 以下
±0.18
20mm 以下
±0.3
外形识别元件
50mm 以下
±0.4
40mm 以下
±0.45
30mm 以下
±0.55
20mm 以下
±0.85
注 1: 0402 的角度,为 XY 定位精度±0.040mm,在宽 0.2mm 的焊盘(Pad)上贴 2/3 以上的元件为
条件的角度。