RS-1 使用说明书 用户使用 Rev01.pdf - 第724页
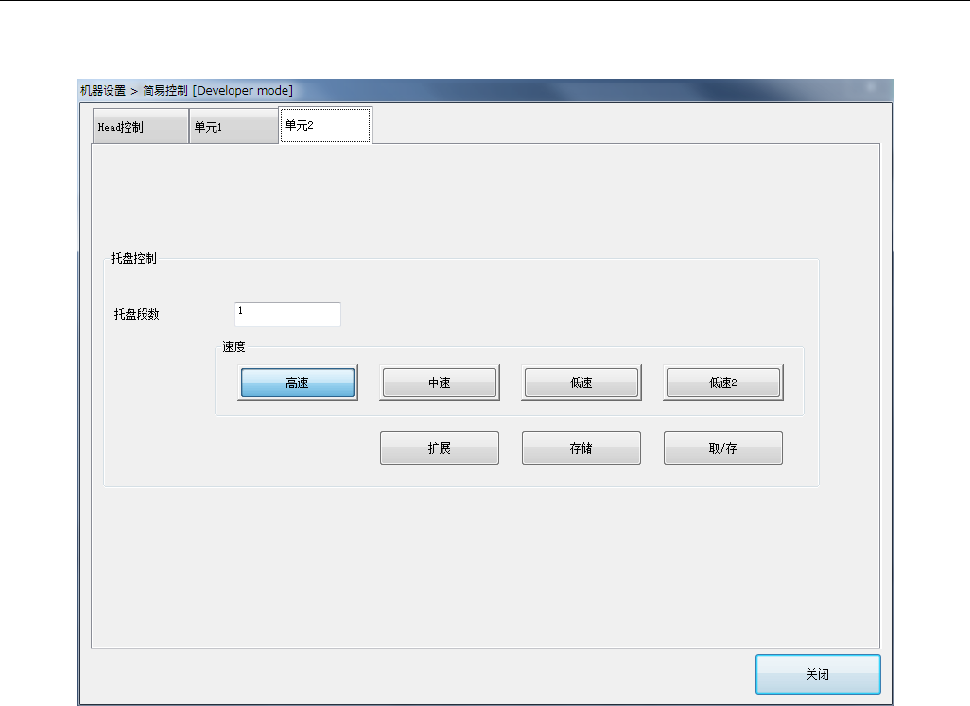
第 2 部 功能详解篇 第 8 章 机器设置 8- 56 8-4- 7 单元 2 可进行 MTS 托盘控制。 选择 [ 托盘控制 ] 的 [ 速度 ] ,按下 [ 扩展 ] 按钮 , 可按选择的 速度拉出托盘 。 (1) 托盘段数 指定控制托盘的 层数。 (2) 速度 指定托盘拉出时 的速度。 (3) 扩展 拉出托盘。
第 2 部 功能详解篇 第 8 章 机器设置
8-55
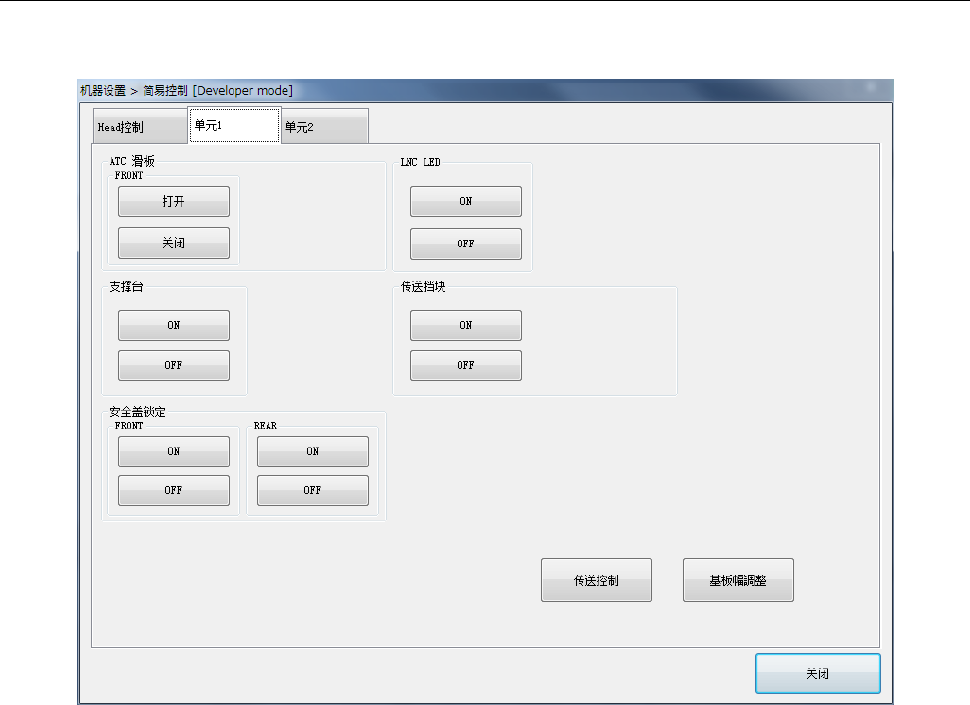
8-4-6 单元 1
可对ATC(滑板)、支撑台、安全盖锁定、LNC LED、传送挡块、传送、AWC进行控制。
(1) ATC 的滑板・・・・・可进行各 ATC 的滑板「OPEN / CLOSE」控制。
(2) 支撑台・・・・・・・可进行支撑台的「UP / DOWN」控制。
(3) 安全盖锁定・・・・・可执行前/后的 「安全盖锁定 ON/OFF」。
(4) LNC LED・・・・・・可以进行 LNC LED 的 「ON / OFF」。
(5) 传送挡块・・・・・・可执行传送挡块的「ON/OFF」。
(6) 传送控制・・・・・・按下[基板幅调整]按钮,即显示基板宽度调整画面。
按下[传送控制]按钮时,即显示基板传送主画面。
第 2 部 功能详解篇 第 8 章 机器设置
8-56
8-4-7 单元 2
可进行MTS托盘控制。
选择[托盘控制]的[速度],按下[扩展]按钮,可按选择的速度拉出托盘。
(1) 托盘段数
指定控制托盘的层数。
(2) 速度
指定托盘拉出时的速度。
(3) 扩展
拉出托盘。
第 2 部 功能详解篇 第 9 章 手动控制
9-1
第
9
章
手动控制
9-1 概要
手动控制,是指为确认各部位的运行,或检查传感器ON/OFF(开,关)的项目。
使用的主要功能有:基板的准备(请参见「2-7-1 基板的设置」),Head的移动,激光的确认等。
还可检查LED是否发生故障(一边使其点亮、灭灯,一边进行检查)。
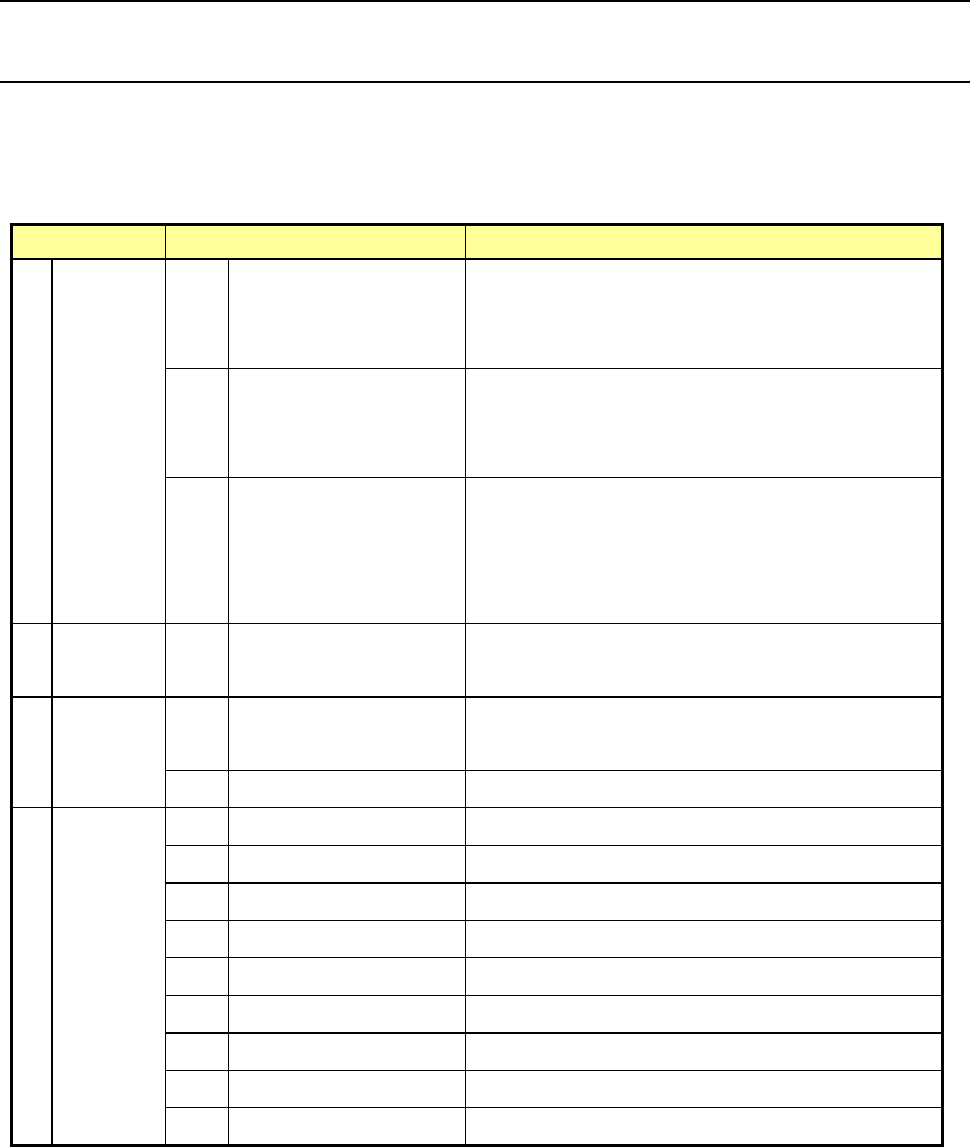
主菜单
子菜单
内容
1
Head
1 Head 控制
以各 Head 为基准的 XY 轴移动控制,坐标显示。
各 Head 的 Z,
θ
,ZA 轴移动控制,坐标显示
各 Head 的真空控制,吹气控制,压力值显示
2 Head 设备控制
以各 Head 装置(OCC,坏板标记传感器,HMS)为基
准的 XY 轴移动控制,坐标显示
各 Head 装置的控制,传感器状态显示
3 激光/传感器控制
各 Head 的真空控制,真空开/关显示
各 Head 的 Z 轴移动控制,坐标显示
算法切换,结果显示,
图像显示边缘检查,边缘检查显示
2
传送系 1 传送控制
基板传送,自动调整基板宽度,传送马达控制,
支撑台控制,信号的状态显示
3
供应设备
1 电动送料器
返回原点,正转(反转)1
间距传送,任意量传送,
正转(反转)步进动作,属性设定,切割控制
2
MTS 控制
托盘控制,状态显示
4 其他
1
ATC 控制
ATC 滑板控制,传感器状态显示,吸嘴吸取控制
2 信号灯控制
信号灯控制,警报器控制,状态显示
3 其他控制
LED 控制,真空控制,状态显示,真空泵控制
4 其它传感器 气压降低传感器等的状态显示
5 驱动器状况 X,Y,Z,
θ
轴驱动器的状态显示
6 伺服状态 伺服状态显示
7 元件验证控制 探针控制,元件计测,状态显示
8 切割控制 切割控制
9 VCS 控制 VCS 控制