TROI_Programing_Chinese_new .pdf - 第15页
www .pemtron.com 15 Step 4 : “ Input PcbName ” 信息将显示 点击 “ OK ” -2-21 Step 5 : 请 在 Header 窗 口 输 入 群 组 名 和 板 名 并 选 择 板 的 颜 色 “ Blu e /Gr een ” 或 “ Y ellow/Red ” 在 “ St e nc i l [T] ” 输 入 钢 网 厚 度 有 需 要 的 在 “ Comment ” 输 入 一…
www.pemtron.com
14
III-2-5
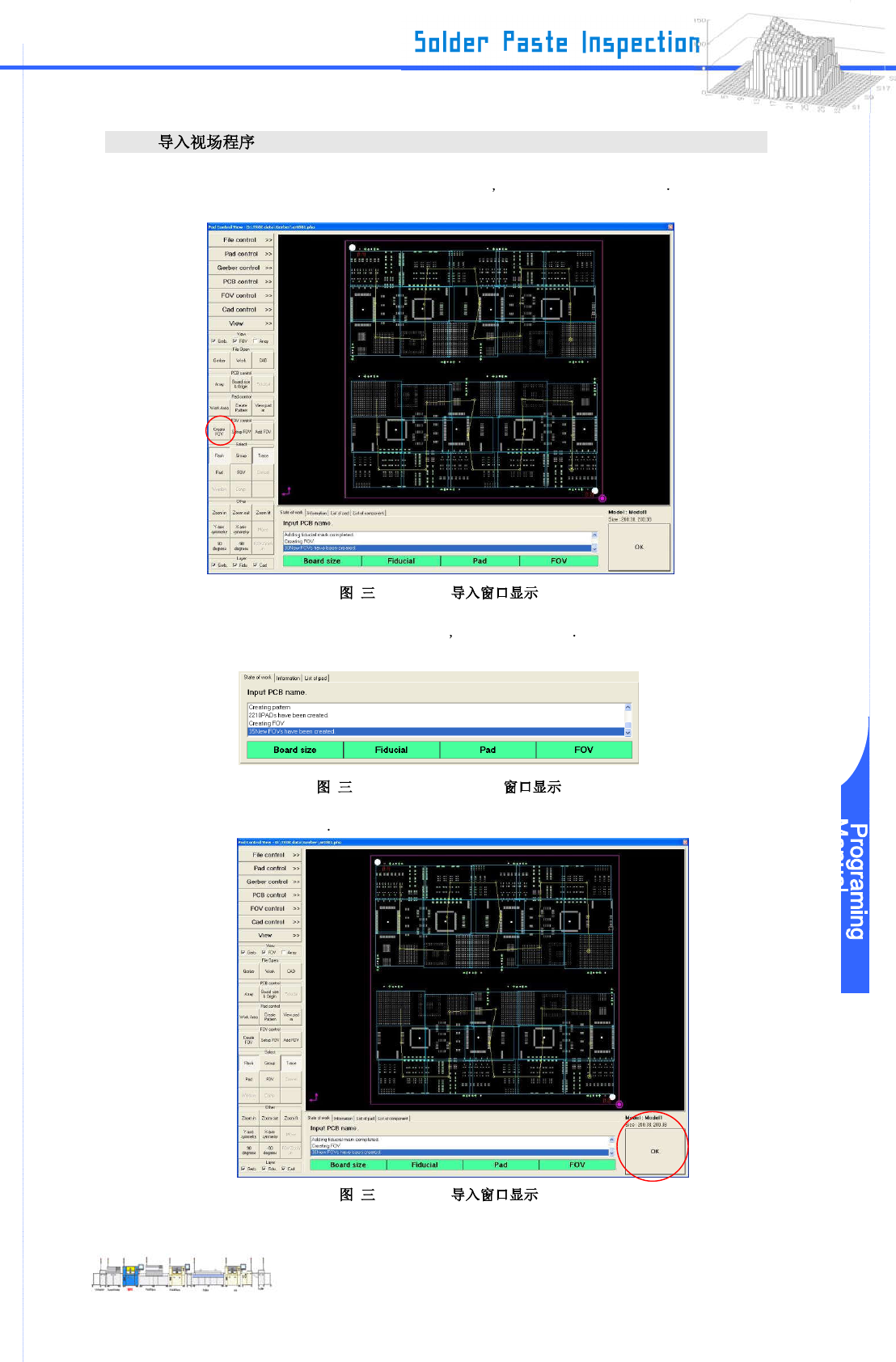
Step 1: 点击左侧窗口“FOV control”的 “Create FOV” 移动的视野优化自动分配
-2-18 FOV
Step 2: 位于窗口底部“State of work”的“FOV” 从粉红色变成绿色
-2-19 “State of work”
Step 3: 点击窗口右下侧 “OK”
-2-20 FOV
www.pemtron.com
15
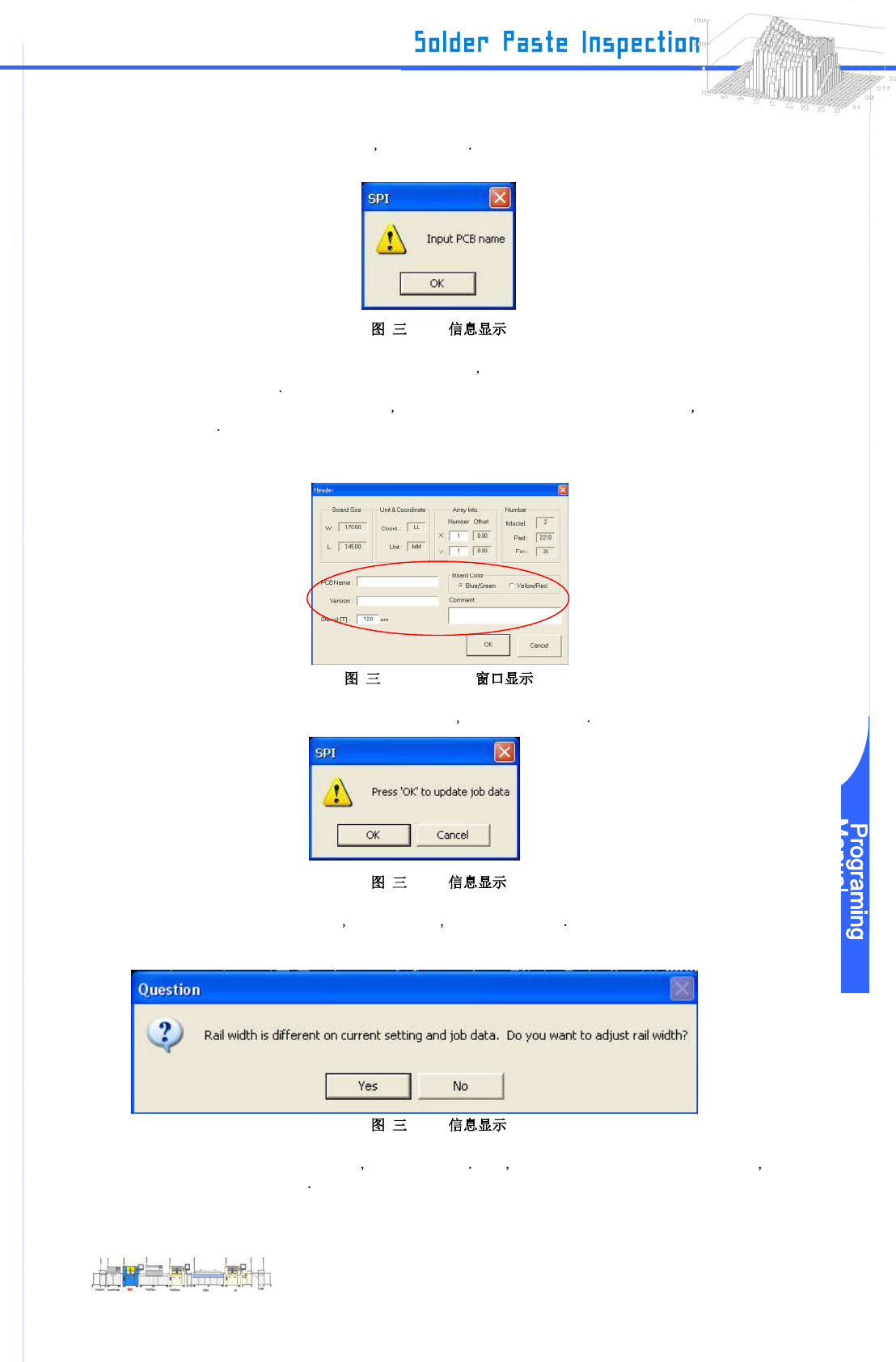
Step 4: “Input PcbName” 信息将显示 点击 “OK”
-2-21
Step 5: 请 在 Header 窗 口 输 入 群 组 名 和 板 名 并 选 择 板 的 颜 色 “Blue/Green” 或
“Yellow/Red”
在 “Stencil [T]” 输 入 钢 网 厚 度 有 需 要 的 在 “Comment” 输 入 一 些 备 注 然 后 点 击
“OK”
-2-22 Header
Step 6: “Press‘OK’ to update job data” 信息显示 电击 “OK”完成
-1-23
Step 7: 调整轨道宽度的信息将显示 电击 “Yes” 轨道宽度自动变更
-2-24
* 如果你不需要调整轨道宽度 请电击 “No” 同样 如果预先导入的是同一轨道宽度数据
此信息可能不会显示
www.pemtron.com
16
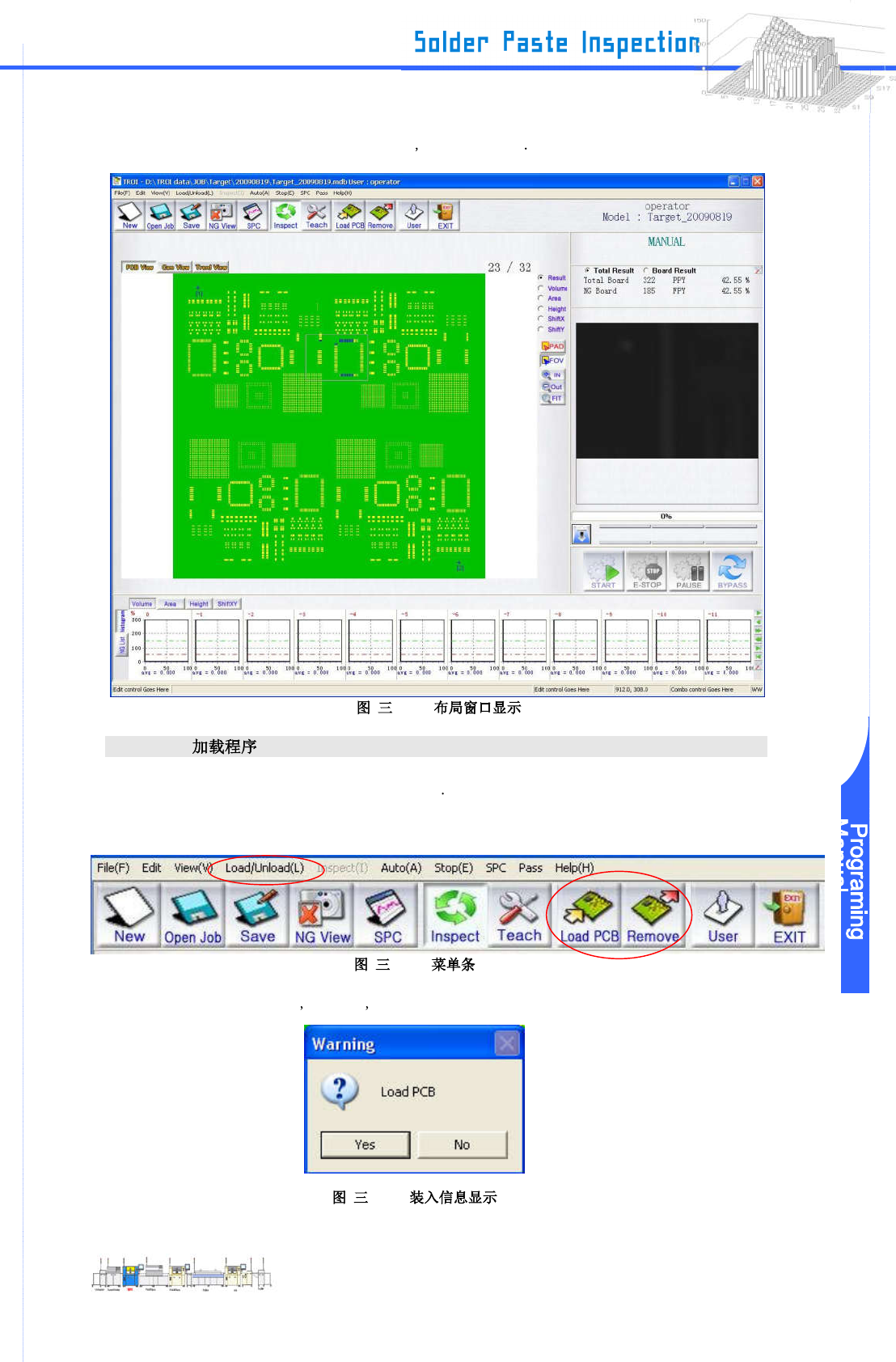
Step 8: 当轨道宽度自动改变并且布局窗口显示 导入过程将完成
-2-25
III-2-6 PCB
Step 1: 放置一个 PCB 以便被装入传感器能感应到
Step 2: 从菜单条里选择 “Load/Unload” .
-2-26
Step 3: “Load PCB”信息显示 当完成后 请电击 “Yes”.
-2-27