深度解析JUKI设备调试.pdf - 第101页
选择是一致还是个别设罝传送的各传感器的延迟时间 。 若选 择则按钮成为凹状态 。 • 标准 : 各传感器采用相同的延迟时间 • 可选 : 各传感器可设罝为不同的延迟时间 延迟时间的选择 若选样 “ 标准 ” , 则以下的 “ 标准 ” 传感器延迟时间为有效 , 若 选择 “ 可选 ” , 则 “ 可选 ” 的各传感器设罝的延迟时间有效 U 从时间 ( ms : 1 / 1000 邱 ) 和长度 ( mm ) 中选样葙板传送传感器延迟 的…
四
:
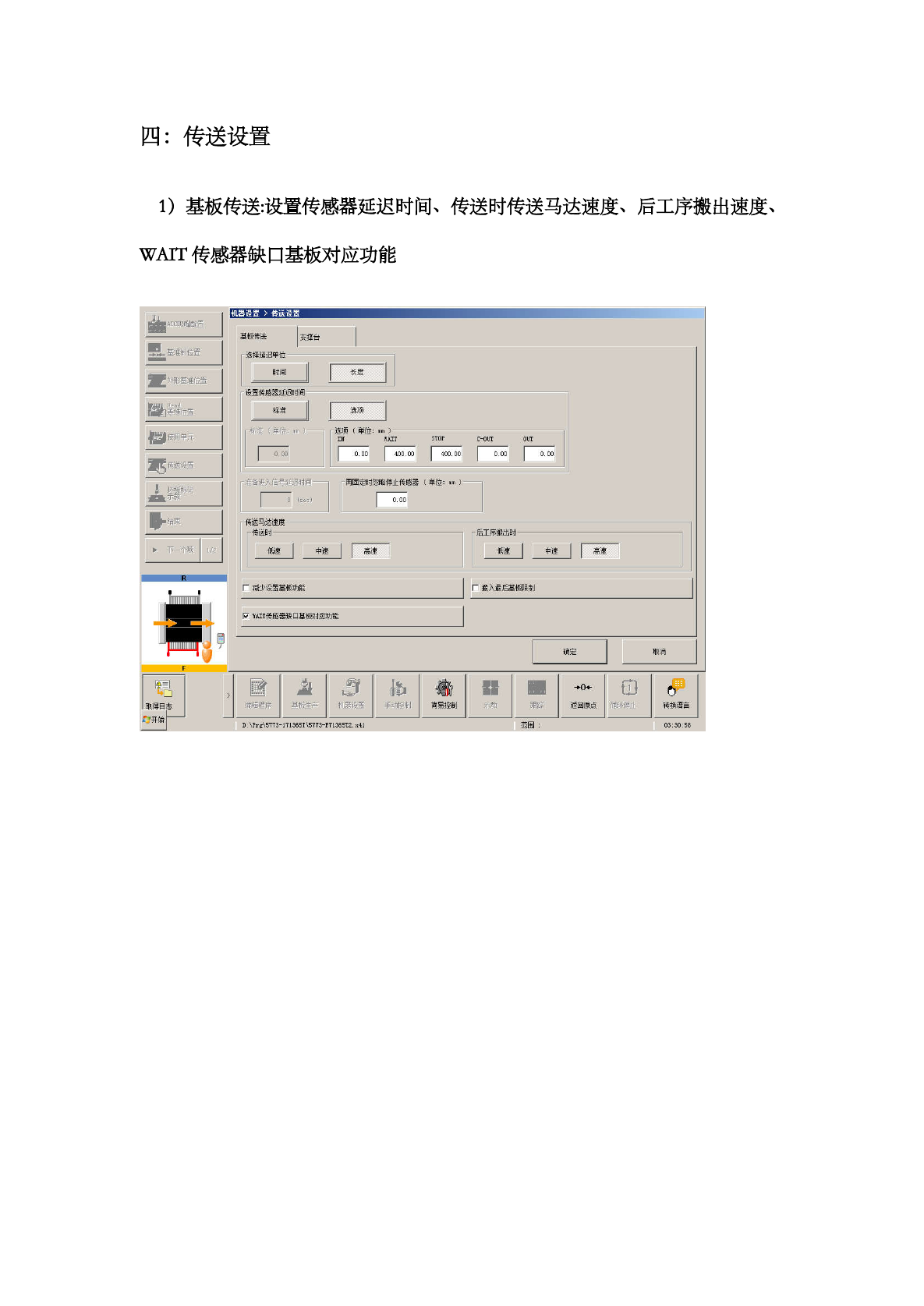
传送设置
1
)
基板传送
:
设置传感器延迟时间
、
传送时传送马达速度
、
后工序搬出速度
、
WAIT
传感器缺口基板对应功能
机
3
设罟
>
传送设昔
4
s
ATC
吸麵晋
基板传
1
支搭台
基准钎位晋
迭择延迟单位
时间
长度
董外形墓准位
S
设晋传感器延迟时间
标准
迭项
「
标准
(
単
迭项
(
単位
:
關
)
德使用单元
STOP
IN
WAIT
C
-
OTJT
OUT
0.00
0.00
400.00 400.00
0.00 0.00
传送隨
「
准备进入信号酬周
再固定时忽略倡止传感器
(
単位
:
_
)
0
(
sec
]
0.00
结束
传送马达速度
传送时
后工序搬出时
►
7
—
个顷
1
/
2
墓速
低速
中速
低速
中速
高速
r
減少设
s
基板功能
厂搬入最后基板眼制
BjPj
*
W
WAIT
传感器缺口基板对应功能
J
9
确定
取消
么 麝
‘
扇 鼉
■
O
㈣
>
机器设晋
手动控制
编辑程序
基板生产
薄離制
S
艇
遐回原点
循环信止
转换语言
取得曰
^
开始
P
范困
:
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
03
:
30
:
58
选择是一致还是个别设罝传送的各传感器的延迟时间
。
若选
择则按钮成为凹状态
。
•
标准
:
各传感器采用相同的延迟时间
•
可选
:
各传感器可设罝为不同的延迟时间
延迟时间的选择
若选样
“
标准
”
,
则以下的
“
标准
”
传感器延迟时间为有效
,
若
选择
“
可选
”
,
则
“
可选
”
的各传感器设罝的延迟时间有效
U
从时间
(
ms
:
1
/
1000
邱
)
和长度
(
mm
)
中选样葙板传送传感器延迟
的设定值的单位
。
选择后
,
按钮成为凹状态
。
延迟的单位
“
延迟时间选择
”
选择了
“
标
准
”
时
,
设罝延迟时间或长度
。
可设罝的值为
0
2500
(
ms
)
、
0
1000
(
mm
)
c
传感器延迟时间
用
“
延迟时间选择
”
选择了
“
可选
”
时
,
分別设罝
IN
传感器
、
WAIT
传感
器
、
STOP
传感器
、
C
.
OUT
传感器
、
0
L
_
T
传感器的延迟时间或长度
。
可选
電新夹授时的
因送料器悬浮等导致生产
W
常停止后重新生产时
,
不除苺
STOP
传感器
OFF
板而重新夹紧
(
翻
H
后夾紧
)
时的延迟时间
可设罝的值为
0
5000
(
ms
)
0
200
(
mm
)
锥板数据
”
的
“
内向卨度
”
的初始值
t
(
单位为
mm
)
基板下限
6
从
“
髙
”
、
“
中
”
、
“
低
”
的
3
种速度中选择支掸台下降时的加
速度
。
(
默认值为
“
髙
”
)
若因焊锡的钻度低等原因而导致元件
4
动
,
请设罝为
“
中
”
或
“
低
”
•
7
下降加速度
W
-
台
输入支撑台卜
.
升时的偏移值
(
0
5
mm
)
按已设罝的值
,
支撑销将苺板向上压入
。
(
默认值
:
0.5
mm
)
8
压入萤
2
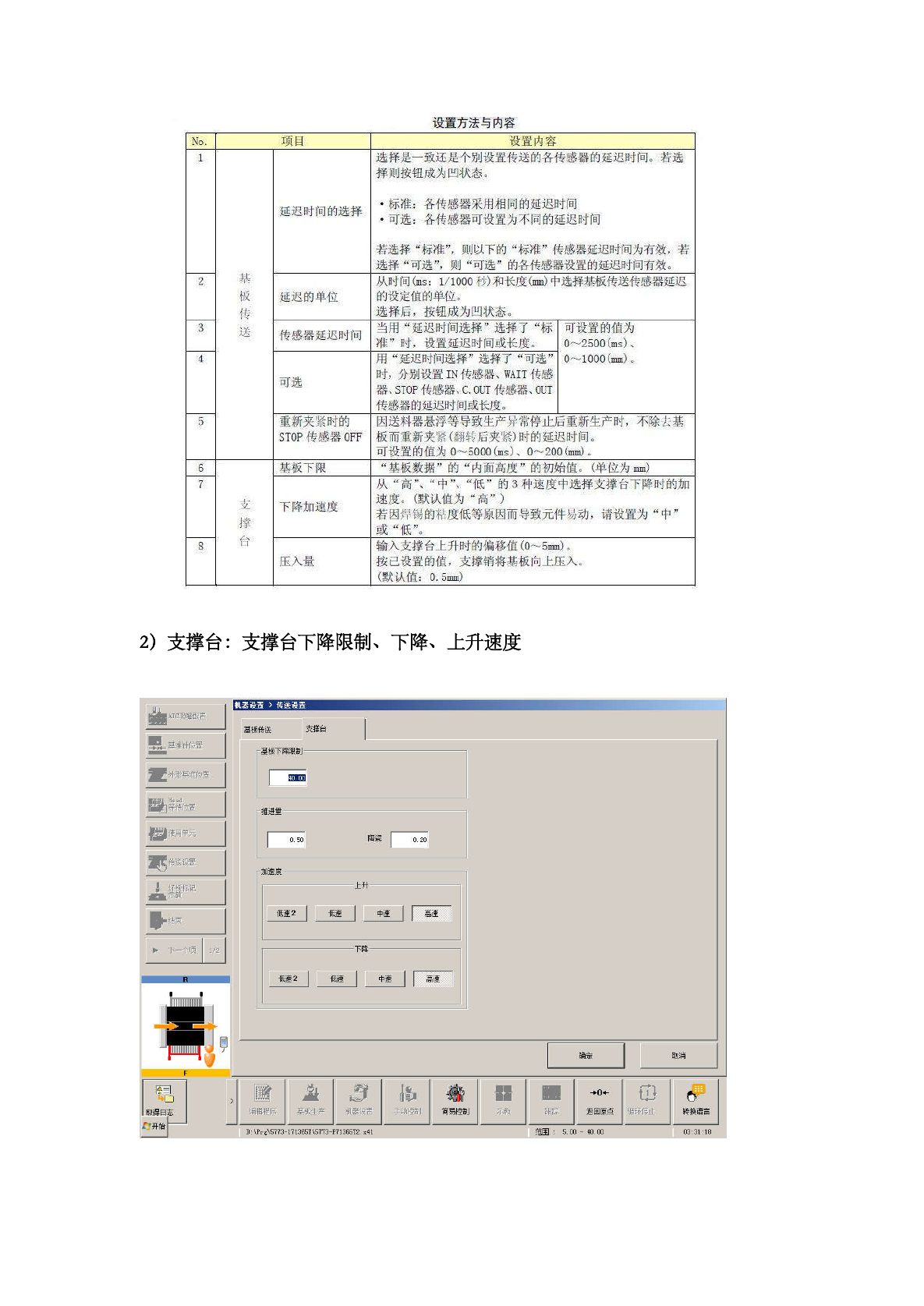
)
支撑台
:
支撑台下降限制
、
下降
、
A
支接台
墓板传送
mmm
.
基板下降眼制
誓外形基准位晋
推进里
微使用单元
陶瓷
_
传送赌
加速
j
上升
丄
!
r
低速
2
低速
高速
下降
►
下一个项
1
/
2
低速
2
低速
中速
高速
确定
取消
崖
5
1
*
»
嬸
Q
基板生产
机器设晋
手动控制
编辑程序
简易控制
遐回原点
循环僖止
转换语言
范困
:
5.00
-
40.00
D
:
\
Prg
\
5
T
73
-
171365
T
\
57
T
3
-
F
71365
T
2
.
x
41
03
:
31
:
18
设罝方法与内容
项
H
设罝内容
No
.
釉 板 传 送
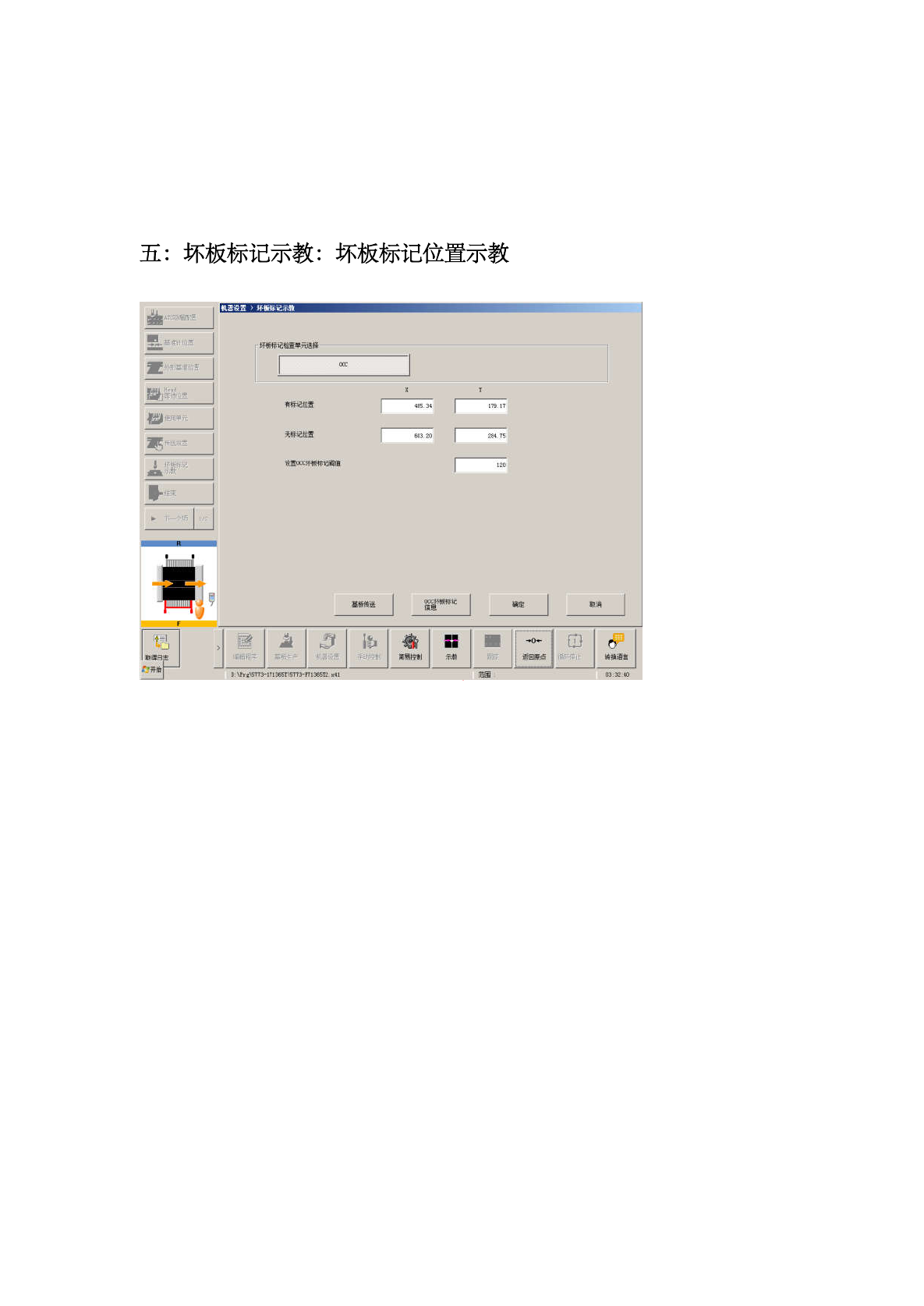
五
:
坏板标记示教
:
坏板标记位置示教
II
.
癍
SS
■