深度解析JUKI设备调试.pdf - 第146页
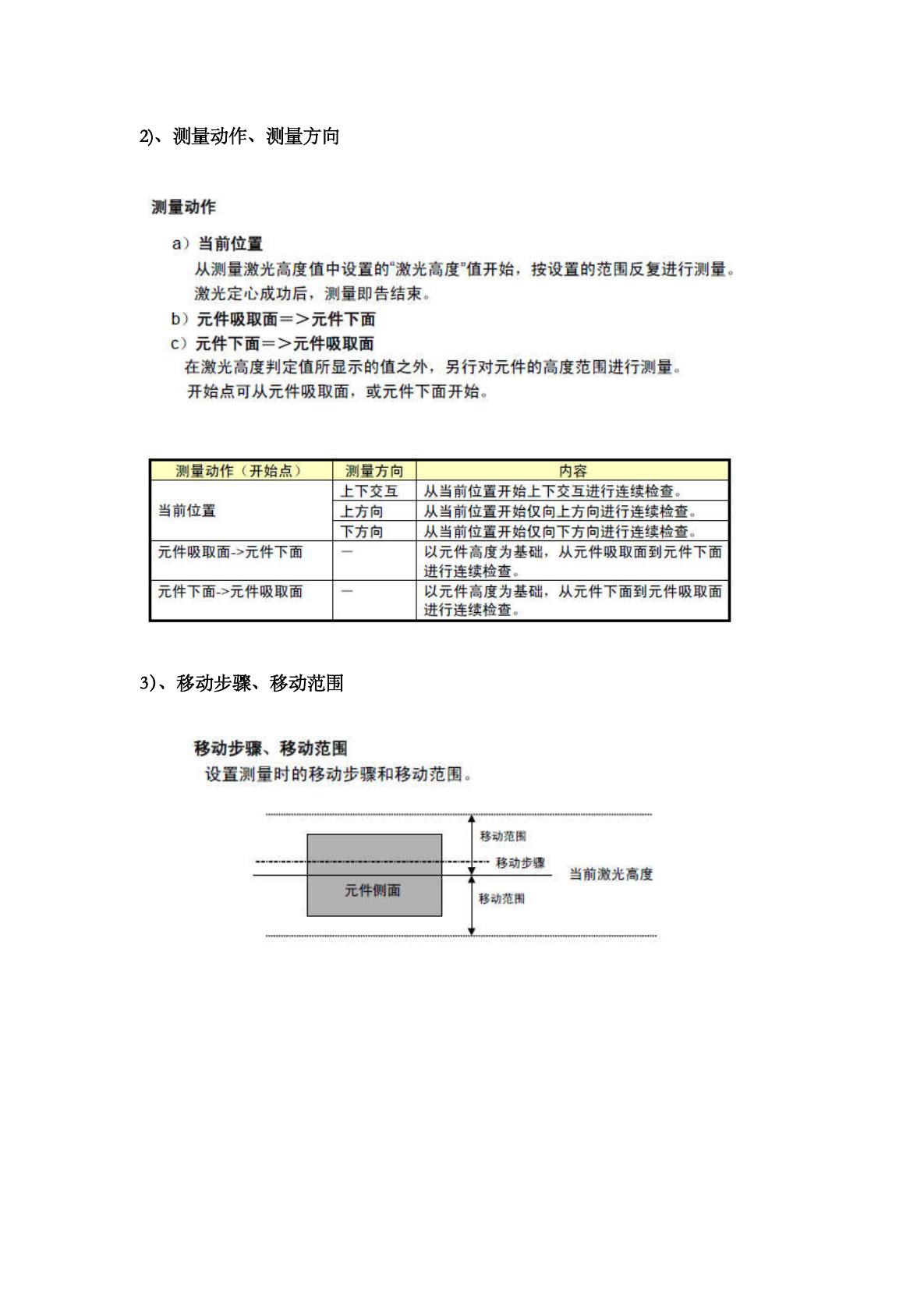
2 ) 、 测量动作 、 测量方向 测量动作 a ) 当前位置 从测量激光髙度值中设置的 “ 激光高度 " 值开始 . 按设置的范围反复进行测詈 激光定心成功后 , 测量即告结束 。 b ) 元件吸取面 = > 元件下面 c ) 元件下面 = > 元件吸取面 在激光高度判定值所显示的值之外 . 另行对元件的高度范围进行测量 开始点可从元件吸取面 . 或元件下面开始 。 内容 测量动作 ( 开始点 ) 测量方向 从当…
瀲綠度酬
1
范囤
厂綱置方向
——
P
将剜定结果
g
映到亓件教撺
激光甚度健结果
1
)
、
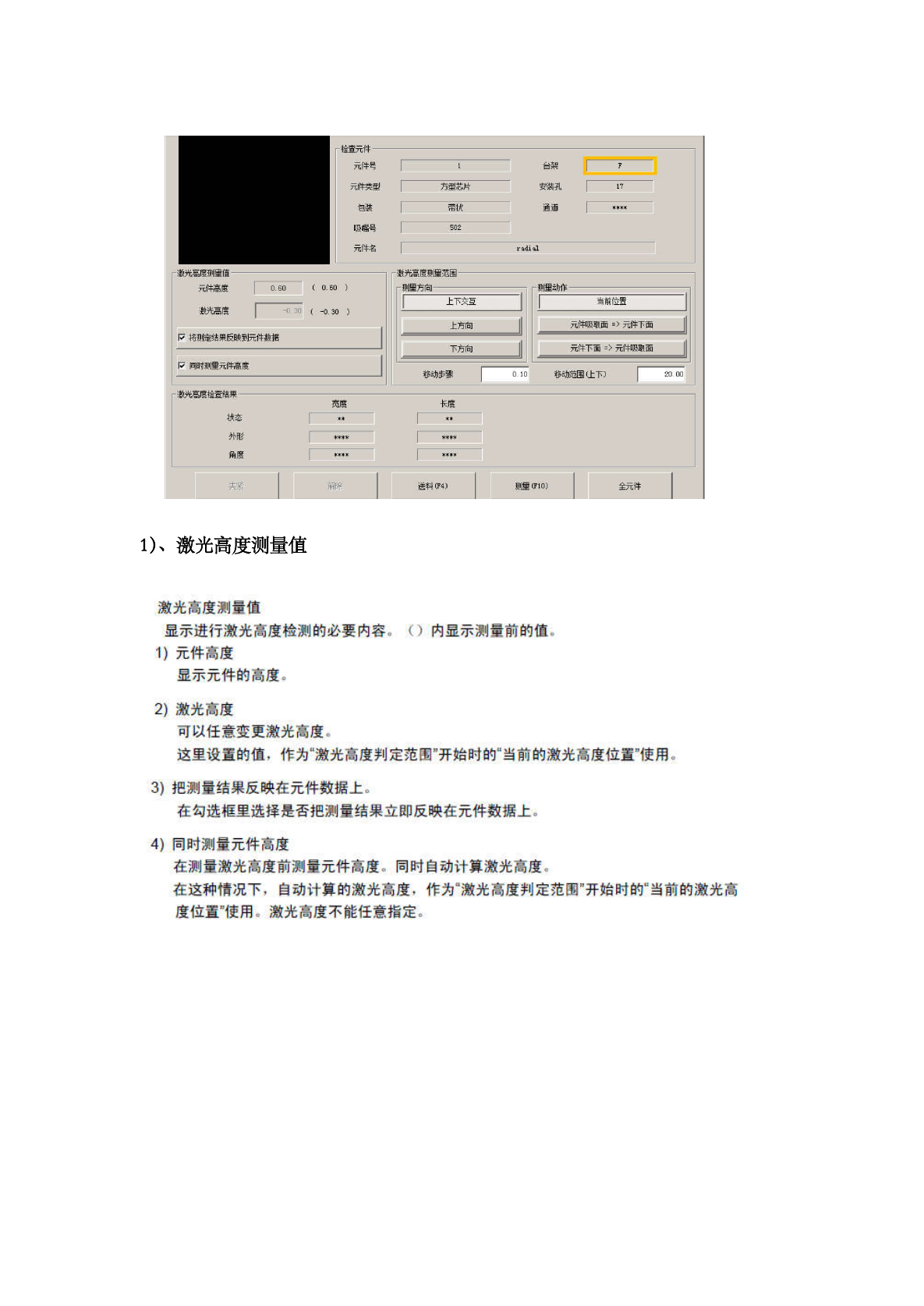
激光高度测量值
激光离度测量值
显示进行激光离度检测的必要内容
u
(
)
内显示测量前的值
U
1
)
元件离度
显示元件的高度
.
2
)
激光高度
可以任意变更激光高度
。
这里设置的值
.
作为
u
激光高度判定范围
■
开始时的
■
■
当前的激光高度位置
"
使用
。
3
)
把测量结果反映在元件数据上
.
在勾选框里选择是否把测量结果立即反映在元件数据上
.
4
)
同时测量元件高度
在测量激光髙度前测
S
元件髙度
。
同时自动计算激光高度
。
在这种情况下
,
自动计算的激光高度
.
作为
激光高度判定范围
■
■
开始时的
°
当前的激光离
度位
M
"
使用
.
激光高度不能任意指定
1
2
)
、
测量动作
、
测量方向
测量动作
a
)
当前位置
从测量激光髙度值中设置的
“
激光高度
"
值开始
.
按设置的范围反复进行测詈
激光定心成功后
,
测量即告结束
。
b
)
元件吸取面
=
>
元件下面
c
)
元件下面
=
>
元件吸取面
在激光高度判定值所显示的值之外
.
另行对元件的高度范围进行测量
开始点可从元件吸取面
.
或元件下面开始
。
内容
测量动作
(
开始点
)
测量方向
从当前位置开始上下交互进行连续检查
。
上下交互
当前位
M
从当前位置开始仅向上方向进行连续检查
i
上方向
从当前位
i
开始仅向下方向进行连续检查
u
下方向
元件吸取面
-
>
元件下面
以元件高度为基础
.
从元件吸取面到元件下面
进行连续检査
-
元件下面
-
>
元件吸取面
以元件高度为基础
.
从元件下面到元件吸取面
进行连续检查
i
3
)
、
移动步骤
、
移动范围
移动步骤
、
移动范围
设置测暈时的移动步骤和移动范围
:
,
袪动范苗
:
-
移动步皤
当前激光
度
元件侧面
七
:
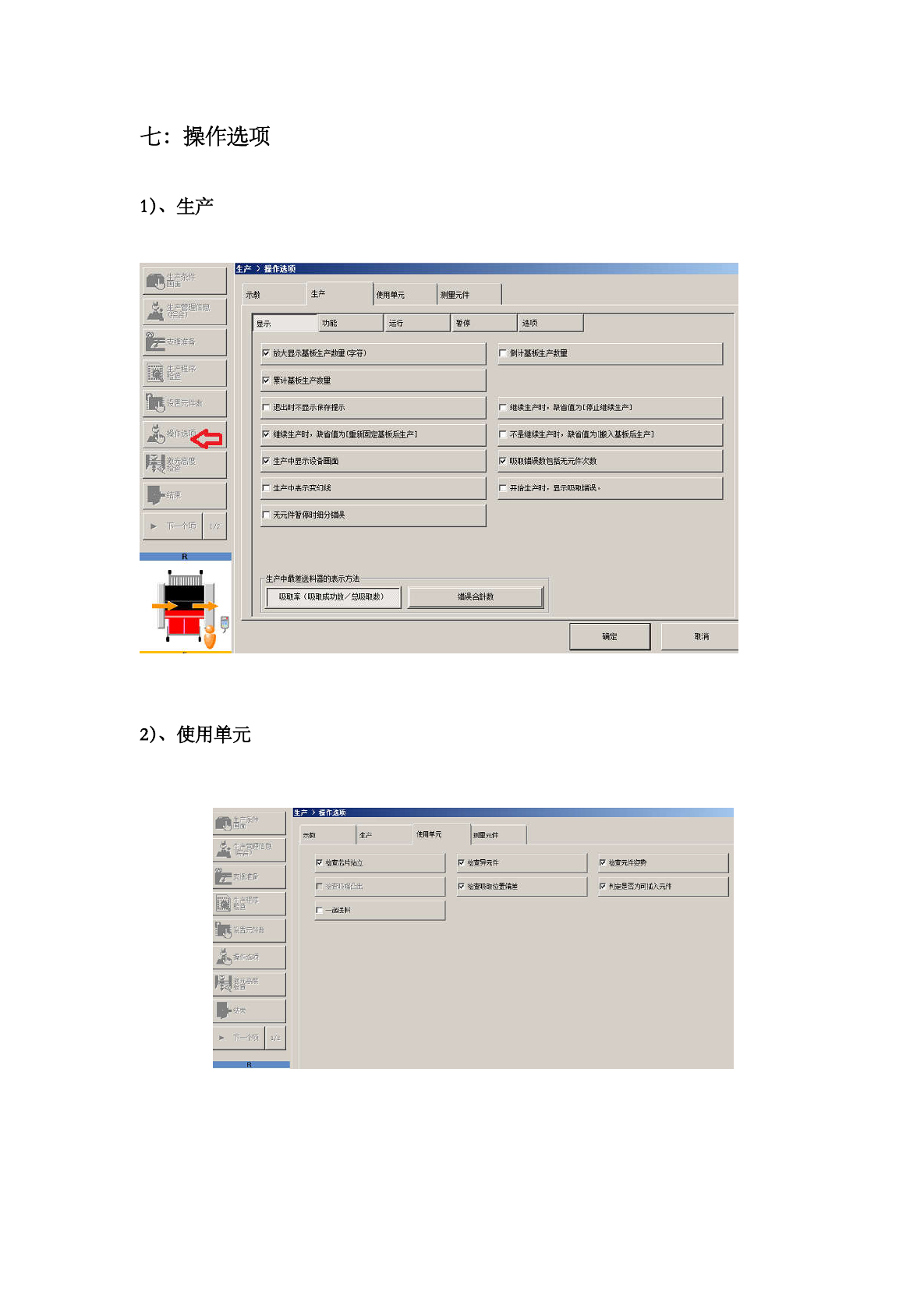
操作选项
1
)
、
生产
a
>
S
作送
麟荣
生户
示教
使用单元
玥里元伴
A
織繼
迭顷
功硓
运行
暂俱
S
示
支麟奋
厂側计嘉板生
?
銪里
W
抽大
S
示
S
板生产抑里莉
)
W
?
计基板生产教里
18
厂遇出时不
S
示係存授示
r
播块生产时
,
玦爸值为
[
傳止播线生产
]
授鍵
i
卩雄续生户时
,
缺省值为
[
垂剁固定基板后生
P
]
r
不是错袋生
?
2
时
,
缺诌值为
[
齡入基拆后生户
]
F
?
生产中
S
示设备画面
[
7
吸取麟数包活无元伴次教
「
生产中表示究幻
^
r
开始生户則
.
s
示吸取怯误
。
m
-
厂无元伴哲伟时细分成诶
►
下一
^
顷
S
生产中敢差送科器的亵示方法
极 取 苯
(
吸 取 成 功 取 取 数
)
ta
误台針教
9
取消
2
)
、
使用单元
^
>
S
作送
_
r
、
件
便用单元
示教
生户
现埋元件
LQ
17
检查芯片钻立
17
检查异元件
17
检查亓伴姿势
支酷雔
厂检到
8
晦凸出
P
检査
DB
取位苦
F
利定是盂为
5
J
!
fiA
5
t
件
IS
辦
厂一起送料
圩
Hr
mv
h
结束
►
l
/
Z