深度解析JUKI设备调试.pdf - 第119页
提慷枳跋踪级取位甚 _ * 哚取位甚提像机涊跬 { 自动瑜送 : | r — 的 ■ iN 3 « 咖 - ■ ■ , ■ ■ n ■ r . i i | ] - yJ ! iJ a [ r ^ i ^ t 一 i M i - f t ; i , i , - r - 1 丨 _ H 卜 5 … j ; i - 吸取 ^ ia 嘬咏扒跟既手动镝斟 m w rx tia ^ . t | UH J ■ t ■ St ] * 1 ” - , L…
1
)
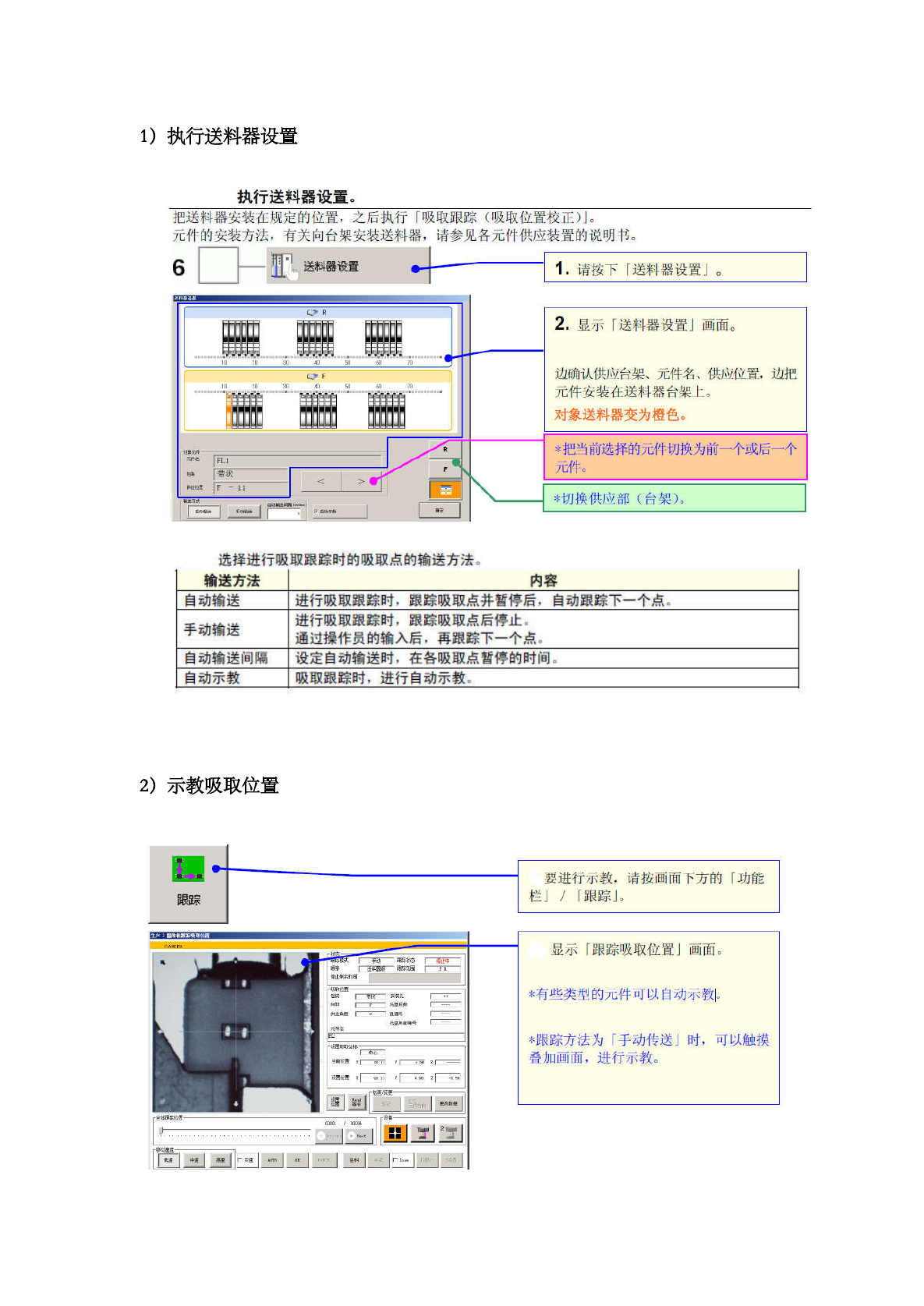
执行送料器设置
执行送料器设置
。
把送料器安装在规定的位置
,
之后执行
f
吸取跟踪
(
吸取位置校正
)
J
。
元件的安装方法
,
有关向台架安装送料器
,
请参见各元件供应装置的说明书
。
—
r
6
送料器设罝
1
.
请按下
「
送料器设置
J
。
2
.
显示
f
送料器设置
j
画面
。
'
■
•
5
r
.
D
边确认供应台架
、
元件名
、
供应位置
,
边把
元件安装在送料器台架上
。
对象送料器变为橙色
。
*
把当前选择的元件切换为前一个或后一个
元件
。
I
带状
|
F
-
11
*
切换供应部
(
台架
)
。
r
^
~
i
油
-
1
p
8
®
55
"
'
L
选择进行吸取跟踪时的吸取点的输送方法
=
输送方法
内容
自动输送
进行吸取跟踪时
.
跟踪吸取点并暂停后
.
自动跟踪下一个点
进行吸取跟踪时
.
跟踪吸取点后停止
。
通过操作员的输入后
.
再跟踪下一个点
。
手动输送
设定自动输送时
.
在各吸取点暂停的时间
。
自动输送间隔
吸取跟踪时
.
进行自动示教
自动示教
2
)
示教吸取位置
:
耍进行示教
,
请按画面下方的
f
功能
栏
J
/
「
跟踪
J
。
跟踪
显示
f
跟踪吸取位置
」
画面
。
Hsnfi
0
*
有些类型的元件可以
fl
动示教
I
。
*
跟踪方法为
「
手动传送
」
时
,
可以触摸
脅加画面
,
进行不
教
。
i
I
am
r
|
ria
21
-
nso
1
]
aj
[
j
^
」
—
j
丨
I
利
》
|
*
c
I
中
s
|
«
e
j
j
r
gg
I
IITO
oi
I
I
|
-
I
f
"
zo
-
I
■
1
提慷枳跋踪级取位甚
_
*
哚取位甚提像机涊跬
{
自动瑜送
:
|
r
—
的
■
iN
3
«
咖
-
■
■
,
■
■
n
■
r
.
i
i
|
]
-
yJ
!
iJ
a
[
r
^
i
^
t
一
i
M
i
-
ft
;
i
,
i
,
-
r
-
1
丨
_
H
卜
5
…
j
;
i
-
吸取
^
ia
嘬咏扒跟既手动镝斟
m
w
rx
tia
^
.
t
|
UH
J
■
t
■
St
]
*
1
”
-
,
L
_
!
5
n
-
撕
r
=
n
-
I
~
¥
—
E
^
7
'
1
~
1
'
.
T
'
"
JtM
I
J
!
'
•
H
'
:
I
<
E
|
TH
*
j
~
=
r
=
i
^
S
:
l
~
THT
丨
:
:
I
iU
^
J
!
ZJ
r
—
!
f
«
J
jiJ
*
*
llrFjt
¥
t
,
_
i
^
.
Ir
■
-
j
*
3
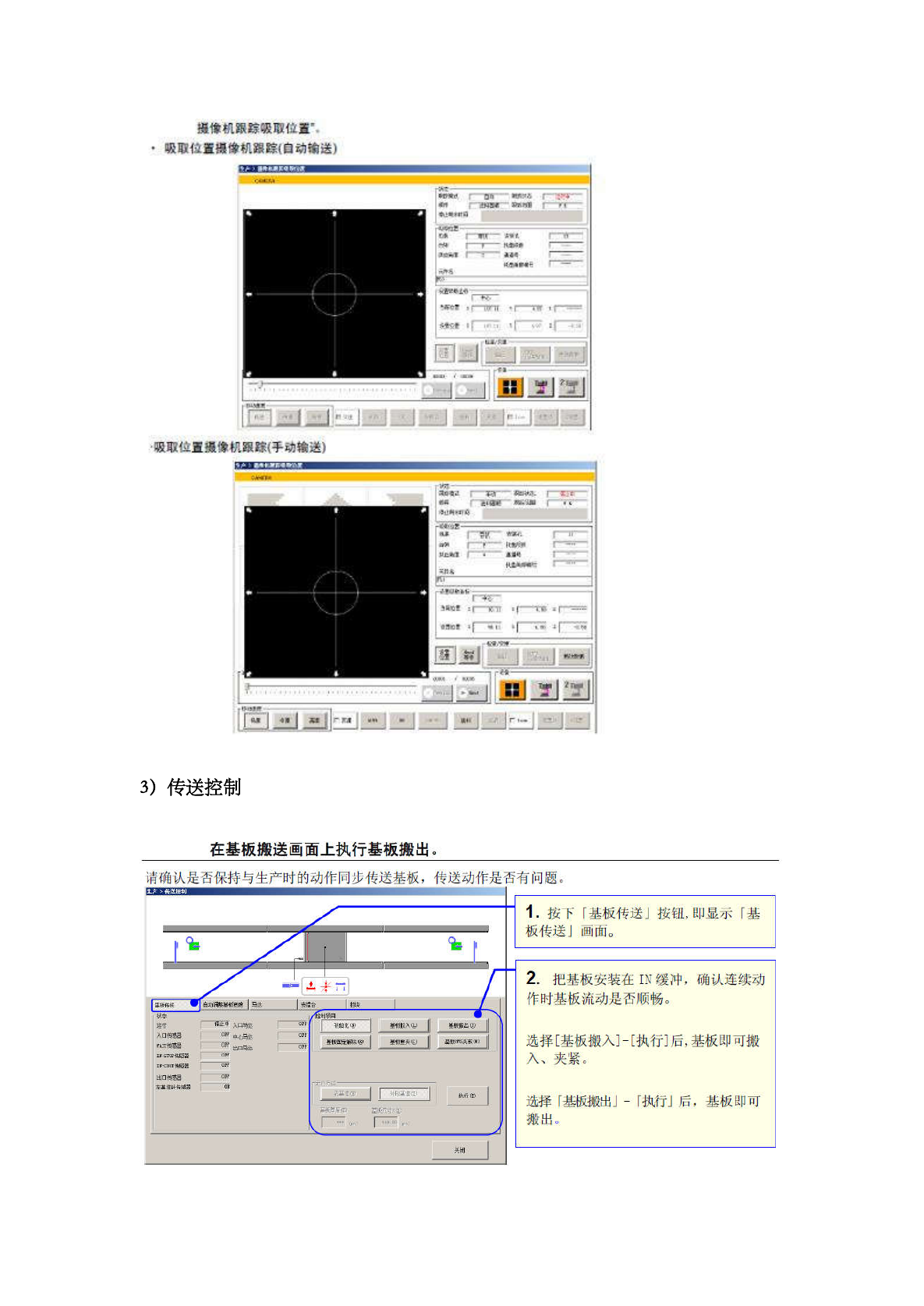
)
传送控制
在基板搬送画面上执行基板搬出
。
请确认是否保持与生产时的动作冋步传送基板
,
传送动作是否有问题
。
1
.
按下
「
基板传送
』
按钮
,
即显示
「
基
板传送
j
画面
。
2
.
把基板安装在
ix
缓冲
,
确认连续动
作时基板流动是否顺畅
。
^
±
\
-
Vteftqp
I
Sfenrexmi
|
|
选择
[
基板搬入
]
_
[
执行
]
后
,
基板即可搬
入
、
夹紧
。
ifjl
rcrttiH
!
u
-
siccftBB
acmisa
xs
&
;
tK
«
a
j
r
H
-
R
*
a
«
ci
选择
「
基板搬出
」
-
「
执行
j
后
,
基板即可
Elf
:
R
-
t
!
1
-
搬出
。
|
|
•
"
»
110
!
>
>
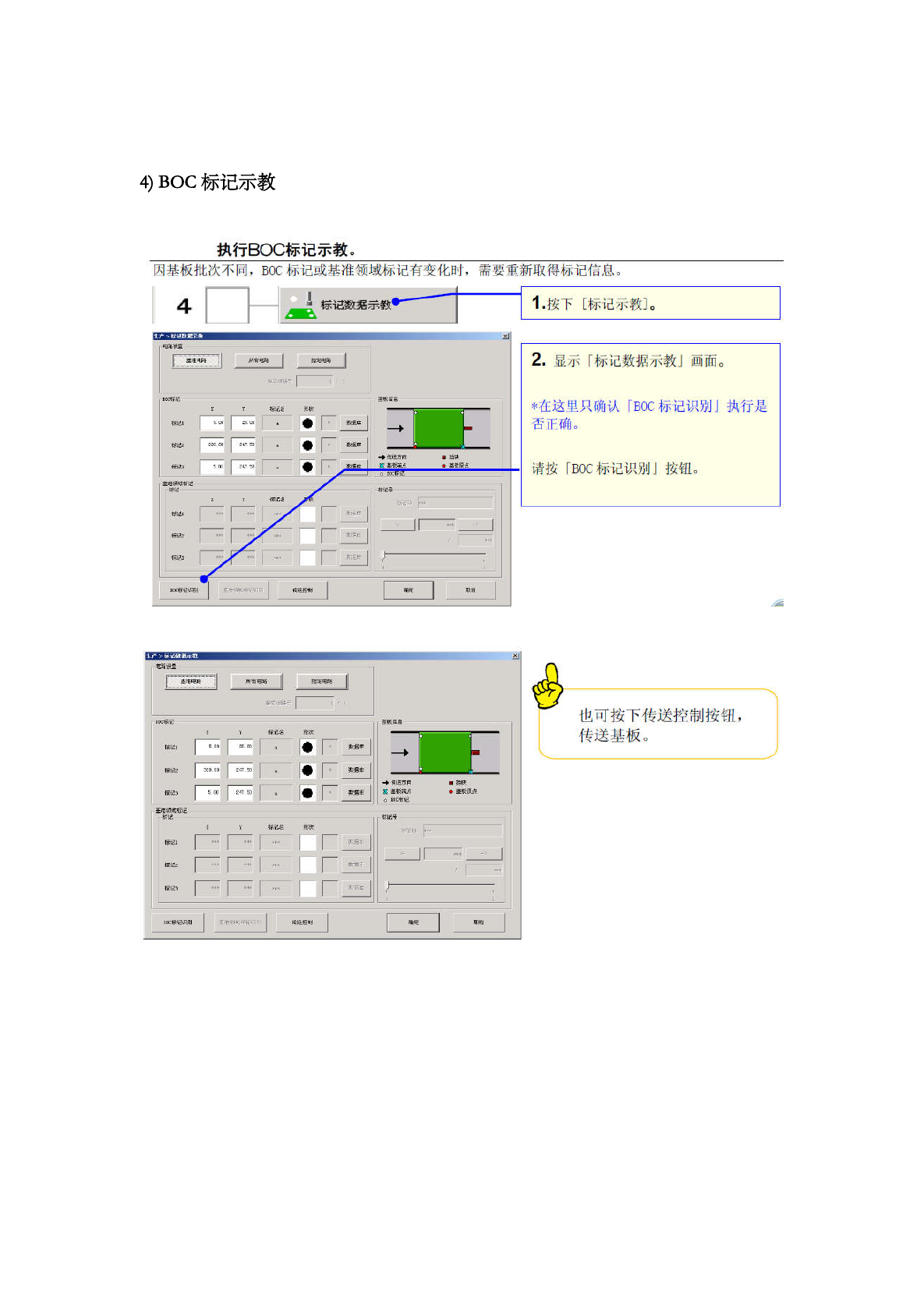
4
)
BOC
标记示教
执行
BOC
标记示教
。
因基板批次不冋
.
B
0
C
标记成基准领域标
i
己有变化时
,
耑戏軍新取得标记信息
。
—
n
1
.
按下
[
标记示教
]
。
4
标记数据示教
1
辟
.
,
1
2
.
显示
「
标记数据示教
j
画面
。
I
觸
*
在这里只确认
「
B
0
C
标记识別
j
执行是
否正确
。
t
T
I
SCO
|
K
.
OT
•
•
|
|
333
00
|
247
50
|
•
•
|
ftlfcg
|
Bait
|
■
尨由
r
7
"
「
请按
「
BOC
标记识别
j
按钮
。
厂
jfil
厂
|
~
條
|
^
T
jcceig
%
i
®
i
j
J
也可按下传送控制按钮
,
传送基板
。
|
SD
。
|
SIC
|
*
|
—
「
嫩
|
i
獅
i
i
-
[
•
r
~
嫩
i
j
5
^
j
241
50
|
«
^
|
鲁
|
fms
|
«
a
tr
«
「
「
卜
|
…
I