深度解析JUKI设备调试.pdf - 第95页
三 : 使用单元 1 ) 标准使用单元 : 传送带驱动感应器的使用 ^ jjATC 吸媸配 g j 迭 《 5 ® 用单元 2 丨标 ; t 功能 | 卜 标准使用单元迭顷使用单元 - m I R L 2 - M « » d I | 7 I | 7 L 4 - Heaid I W L 5 ~ H « » d I W L 6 - H « « td I ffi 齄位晋 ■ 使用单元 - 传送带浮动传感器 ag 传送織 丄 禁 緩 标 记 ^…
单元格中若已有输入的数值时
.
可先按
13
日
1
/
或氾八
0
<
SPACE
”
键进行删除
.
再按
“
ENTER
"
、
u
字段移动键确定
.
原分配的吸嘴种类
、
II
空值
、
吸嘴高度即可清除
。
相应的
ATC
所有显示也会消失
《
示例
:
设
MATC
编号
3
时
:
2
500
3
501
2
)
、
自动分配
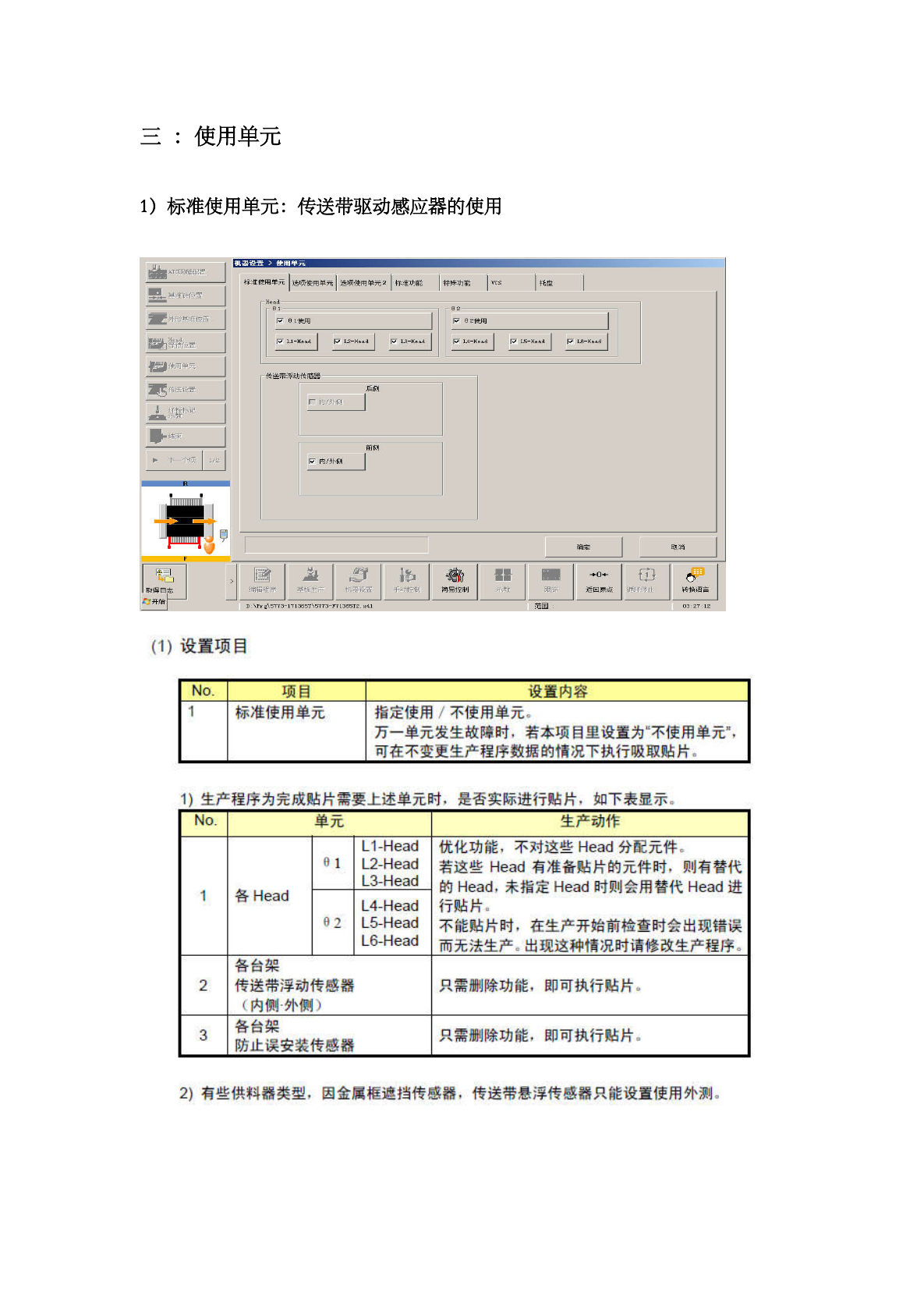
自动分配
按下画面右侧的
“
自动分配
”
按钮后
.
可通过在
“
ATC
选择
”
处所选择的
ATC
单元显示如下
3
个画面
。
勾选需要分配的
ATC
号
,
按下
“
自动取得
”
按钮
.
则被选择的
ATC
号的吸嘴可依次自动完成
设置
•
标准
ATC
时
|
r
si
I
r
32
|
r
33
|
r
$
I
r
2
o
|
i
~
2
i
I
r
I
r
23
I
r
«
|
r
2
S
I
r
8
B
I
r
ST
I
r
|
r
»
I
r
io
j
广
】
】
j
r
ig
|
r
i
3
j
广
u
j
广
】
s
j
r
»
|
r
»
?
j
厂
】
s
j
「
w
|
r
,
l r i
l r a
l r
<
l r
,
l r
>
l r
,
l r
,
l r
,
I
自柳徇
m
三
:
使用单元
1
)
标准使用单元
:
传送带驱动感应器的使用
^
jjATC
吸媸配
g
j
迭
《
5
®
用单元
2
丨标
;
t
功能
|
卜
标准使用单元迭顷使用单元
-
m
I
R
L
2
-
M
«
»
d
I
|
7
I
|
7
L
4
-
Heaid
I
W
L
5
~
H
«
»
d
I
W
L
6
-
H
«
«
td
I
ffi
齄位晋
■
使用单元
-
传送带浮动传感器
ag
传送織
丄 禁 緩 标 记
^
内
/
外侧
TTlmlmllrv
S
9
>
鐘 遽
<
0
癰
H
_
tB
P
编辑程序
简易控釗
(
1
)
设置项目
设置内容
No
.
项目
标准使用单元
指定使用
/
不使用单元
。
万一单元发生故醵时
.
若本项目里设置为
“
不使用单元
可在不变更生产程序数据的情况下执行吸取貼片
。
1
)
生产程序为完成貼片需要上述单元时
.
是否实际进行貼片
,
如下表显示
。
No
.
单元
生产动作
L
1
-
Head
L
2
-
Head
L
3
-
Head
优化功能
,
不对这些
Head
分配元件
=
若这些
Head
有准备貼片的元件时
.
則有替代
的
Head
.
未指定
Head
时则会用替代
Head
进
行貼片
.
不能貼片时
.
在生产开始前检查时会出现错误
而无法生产出现这种情况时请修改生产程序
.
0 1
各
Head
L
4
-
Head
L
5
-
Head
L
6
-
Head
62
各台架
传送带浮动传感器
(
内铡外侧
)
只需删除功能
.
即可执行貼片
a
2
各台架
只需删除功能
.
即可执行貼片
=
3
防止误安装传感器
2
)
有些供料器类型
.
因金属框遮挡传感器
.
传送带悬浮传感器只能设置使用外测
。
(
2
)
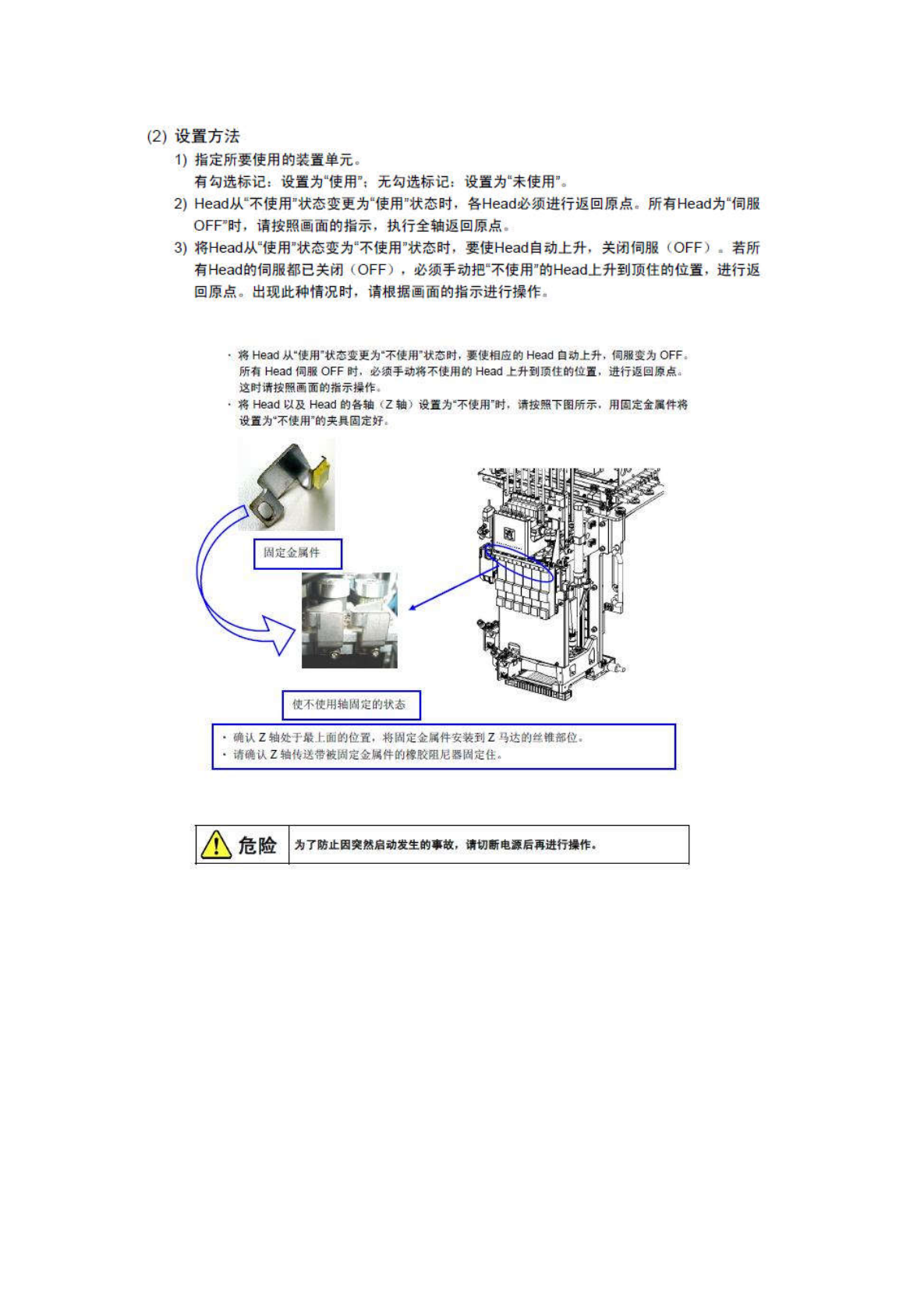
设置方法
1
)
指定所要使用的装蓳单元
。
有勾选标记
:
设置为
“
使用
、
无勾选标记
:
设置为
“
未使用
'
2
)
Head
从
“
不使用
”
状态变更为
“
使用
”
状态时
,
各
Head
必须进行返回原点
.
所有
Head
为
“
伺服
OFP
时
,
请按照画面的指示
,
执行全轴返回原点
3
)
将
Head
从
“
使用
”
状态变为
“
不使用
3
状态时
.
要使
Head
自动上升
,
关闭伺服
(
OFFh
若所
有
Head
的伺服都已关闭
(
OFF
)
•
必须手动把
“
不使用
nMHead
上升到顶住的位置
.
进行返
回原点
。
出现此种情况时
,
请根据画面的指示进行操作
:
•
将
Head
从
使用
”
状态变更为
u
不使用
"
状态时
.
要使相应的
Head
自动上升
.
伺服变为
OFF
所有
Head
伺服
OFF
时
.
必须手动将不使用的
Head
上升到顶住的位
5
.
进行返回原点
。
这时请按照甬面的指示操作
:
•
将
Head
以及
Head
的各轴
(
Z
轴
:
设
M
为
“
不使用
"
时
•
谞按照下图所示
.
用囡定金厲件将
设
M
为
u
不使用
"
的夹兵固定好
.
阀定金属件
使不使用轴尚定的状态
•
确认
Z
轴处
r
拟
h
面的位
S
,
将阀定金辑件安装到
Z
马达的丝锥部位
,
•
请 确 认
Z
轴
H
送带被尚定金属件的榷胶阳尼器
W
定住
/
?
\
危险
为了防止因突然庙动发生的事故
,
请切断电源后再进行搡作
•