深度解析JUKI设备调试.pdf - 第47页
目录 将 物 料 由 方 型 芯 片 改 为 插 入 元 件 是 时 , 各数 据 已更 改 完, 所有 单 独测 量 动 作 完成 后 ,退 出 页面 再打 开 此元 件 库 时 , 又 恢 复至 原 来状 态 ( 方 型芯 片 数 据) ,此 时就 必 须 点击“ 是” ,然 后 再设定 feeder 料站信息。 元件名 : 元件类型 : I 方型芯片 | iiF 包装 : - 外形尺寸 i 专心方式 ^ m r 图 像 宽度 ⑽ …
若出现以下情况需选择“
③
Feeder
宽度及
Pitch
*
包装
*
定心
#
应设奋
哗应设备
-
72
mm
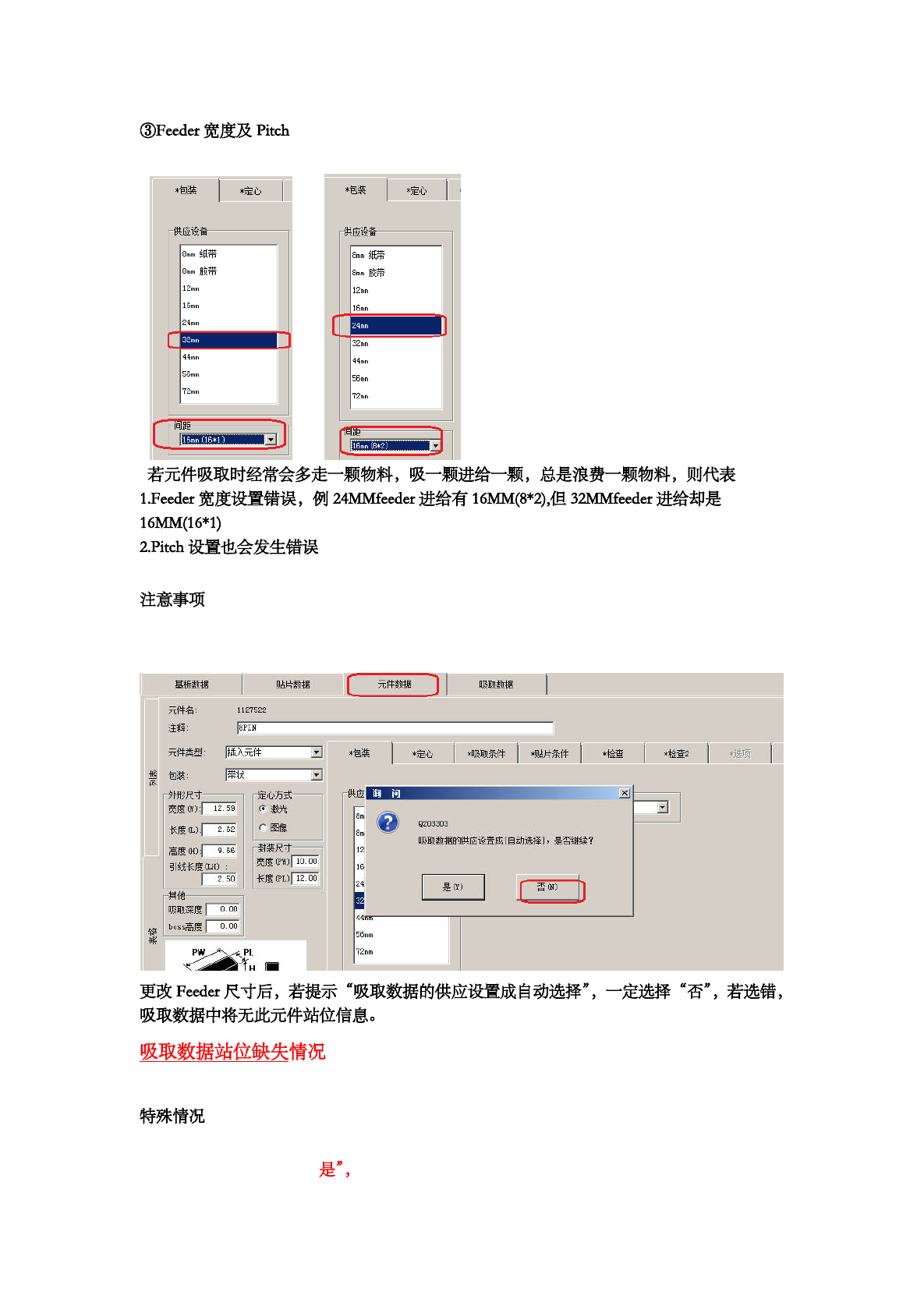
若元件吸取时经常会多走一颗物料
,
吸一颗进给一颗
,
总是浪费一颗物料
,
则代表
1
.
Feeder
宽度设置错误
,
例
24
MMfeeder
进给有
16
MM
(
8
*
2
)
,
但
32
MMfeeder
进给却是
16
MM
(
16
*
1
)
ZPitch
體也会发生觀
注意事项
]
1
元件教掮
贴片教掮
吸取數掮
元件名
:
|
8
PIH
亓件类型
:
1
插入元件
*
吸取条件
*
贴片条件
*
定心
*
縫
2
[
15
F
1
]
x
]
外形尺寸
——
宽度
Of
)
:
|
12.59
长度叫
J
"
"
"
212
(
高度
㈤
)
~
916
引线长度
CLH
)
:
$
心方式
-
3
I
:
:
吸取數据的供应设置成
[
自动迭择
]
,
是否继续
?
省装尺寸
宽度
⑽
长度
(
PL
)
|
12.00
r
^
n
]
吸取深度
I
0.00
高度
I
0
00
更改
Feeder
尺寸后
,
若提示
“
吸取数据的供应设置成自动选择
'
一定选择
“
否
'
若选错
,
吸取数据中将无此元件站位信息
。
吸取数据站位缺失情况
特殊情况
是
”
,
目录
将物料由方型芯片改为插入元件是
时,各数据已更改完,所有单独测量
动作完成后,退出页面再打开此元件
库时,又恢复至原来状态(方型芯片
数据),此时就必须点击“是”,然后
再设定 feeder 料站信息。
元件名
:
元件类型
:
I
方型芯片
|
iiF
包装
:
-
外形尺寸
i
专心方式
^
m
r
图 像
宽度
⑽
:
|
20.27
长度
(
L
)
|
~
T
^
l
(
H
)
j
~
~
4
l
9
封装尺寸一
长 度
㈣
:
~
|
长 度
<
TL
)
|
吸取深度
I
~
0
^
0
H
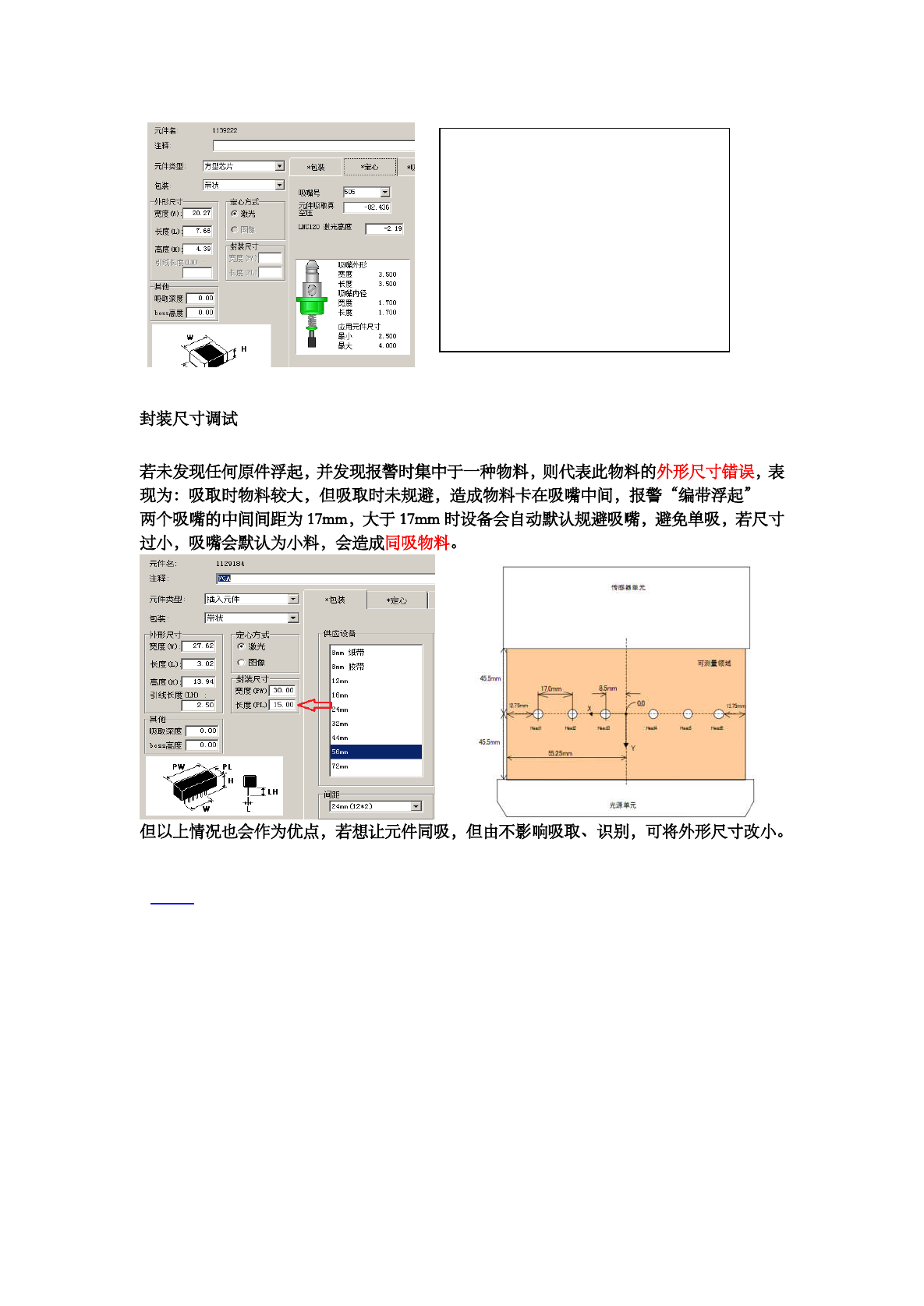
封装尺寸调试
若未发现任何原件浮起
,
并发现报警时集中于一种物料
,
则代表此物料的外形尺寸错误
,
表
现为
:
吸取时物料较大
,
但吸取时未规避
,
造成物料卡在吸嘴中间
,
报警
“
编带浮起
”
两个吸嘴的中间间距为
17
mm
,
大于
17
mm
时设备会自动默认规避吸嘴
,
避免单吸
,
若尺寸
过小
,
吸嘴会默认为小料
,
会造成同吸物料
。
元件名
:
ft
感
■
灕死
元件类型
:
|
插入亓件
31
*
包装
*
定心
\
rnii
包装
:
供应设备
8
mm
iS
p
心方式
_
^
激光
r
图像
宽度
0
T
)
:
|
27.62
长度
~
3
^
2
高度叫
13.94
引线长度
OH
)
:
胶芾
可
《
量領孅
piit
装尺寸
宽度
CPf
)
|
30
.
00
45
Jrrro
O
—
O
-
-
…
-
C
其他
吸取深度
I
~
0
^
0
bosses
|
~~
0.00
间距
|
24
mn
.
(
12
*
2
)
光调雖元
但以上情况也会作为优点
,
若想让元件同吸
,
但由不影响吸取
、
识别
,
可将外形尺寸改小
。
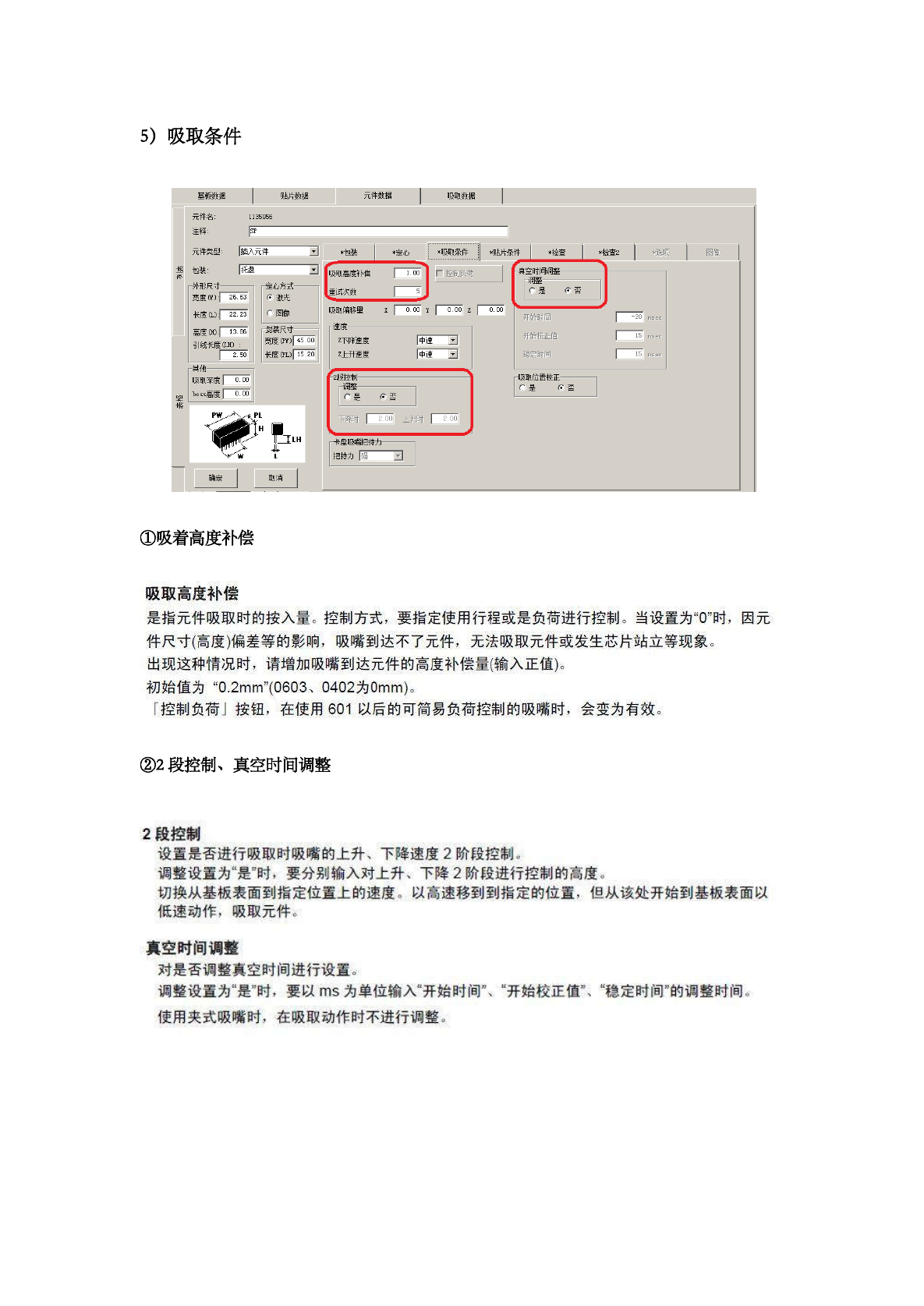
5
)
吸取条件
吸取数掮
*
检查
2
|
|
~
foo
r
控制负荷
「
广是
JI
3
mm
宽度叫
26.63
长度叫
22
^
23
SSOOj
13.86
X
|
0.00
I
|
0.00
Z
|
0.00
吸取偏移里
I
—
~
I
开
㈣
间
r
~
^
I
^
ms
宽度
长度
(
PL
)
|
15.20
|
中
zl
^
吸取位
S
I
:
上
吸取深度
I
~
0
^
00
b
0
SS
葚度
I
0.00
①
吸着高度补偿
吸取高度补偿
是指元件吸取时的按入量
。
控制方式
,
要指定使用行程或是负荷进行控制
。
当设置为
“
0
”
时
,
因元
件尺寸
(
高度
)
偏差等的影响
,
吸嘴到达不了元件
,
无法吸取元件或发生芯片站立等现象
=
出现这种情况时
,
请增加吸嘴到达元件的高度补偿量
(
输入正值
初始值为
“
0
_
2
mm
”
(
0603
、
0402
为
0
mm
)
。
「
控制负荷
j
按钮
,
在使用
601
以后的可简易负荷控制的吸嘴时
,
会变为有效
。
②
2
段控制
、
真空时间调整
2
段控制
设置是否进行吸取时吸嘴的上升
、
下降速度
2
阶段控制
调整设置为
“
是
”
时
,
要分别输入对上升
、
下降
2
阶段进行控制的高度
切换从基板表面到指定位置上的速度
,
以高速移到到指定的位置
.
但从该处开始到基板表面以
低速动作
,
吸取元件
.
真空时间调整
对是否调整真空时间进行设置
。
调整设
M
为
“
是
”
时
,
要以
ms
为单位输入
"
开始时间
"
、
u
开始校正值
'
“
稳定时间
"
的调整时间
。
使用夹式吸嘴时
.
在吸取动作时不进行调整
。