深度解析JUKI设备调试.pdf - 第154页
在 “吸 取数据” 中更改 “吸取角度 ” 注意在此 更改了吸取 角度时, 吸嘴的吸取角度也会转 相 应的数量 十 : 更改供应角度 基 板 ! 元 ft 教 a D 明 RPHfsS 元件名 m 后 - 后 - < 1 后 - 4 2 ( 5 _ - 38 祐 - 苈 I + fast 帝梢 h Binig 错 m an 器 种 类 w ® 角 I ? ¥ m st * si - < 6 粕 - V I 祐 -…
计算机-管理
I
oo
a
i
命令提不符
向管理员
:
命令搓示符
.
icrosoft
Windows
[
版本
6.1
.
7601
]
Copyright
<
c
>
2010
Microsoft
Corporation
.
All
rights
reserved
.
计算机管理
JUKI
画图
p
:
\
JUKI
\
Too
Is
>
log
,
.
文档
RTX
Properties
图片
>
磁盘
*
理
任务计划程序
音乐
©
计算机
控制面板
设备和打印机
默认程序
帮助和支持
所有程序
w
关机卜
捜索程序和文件
vl
I
管理 员命令槎示符
-
记事 本
文件
CF
)
编辑
(
J
)
格式
⑼
查看
(
V
)
帮助
00
新建
00
打开
(
0
)
.
. .
保存
⑸
Copyright
<
c
>
2010
Microsq
12
,
INF
,
2045
,
1
,
rosg
=
Cautionl
1
this
tiitie
=
-
34
(
msec
)
:
HEAD
2
,
INF
,
0000
,
^
ZAxis
Optim
Pos
Wait
Kind
Place
.
:
HEAD
2
,
INF
,
0000
,
1
,
Mount
Rise
End
.
:
SYNCR
0
,
STS
,
0
,
1
,
YSyncro
Receve
Command
Bit
Ptrn
(
Hex
)
=
:
SYNCR
0
,
STS
,
0
,
1
,
YSyncro
Wait
Command
Bit
Ptrn
(
Hex
)
=
:
(
Robot
—
>
Shed
)
wCode
=
0
lStatus
=
0
:
HEAD
2
,
INF
,
0000
,
1
,
Place
End
.
:
4000
,
EventLog
Kind
=
ll
Parainl
=
250
Parain
2
=
0
Param
3
=
2
Param
4
=
5647
:
7083
,
Schedule
Thread
<
Product
Thread
:
Rev
-
[
1
(
PD
_
PR
0
D
)
]
Sched
:
4999
,
Disable
SchedTactTrigger
Port
=
l
Sw
=
0
Sched
:
7060
,
Schedule
Thread
>
Petri
Thread
:
Snd
-
[
0
x
62
(
SCHED
_
PC
_
HIST
)
Sched
:
-
DEBUG
-
SchedGetNextPickThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
11103
ResetNozzle
9
0
1 7
-
1 2
-
1
-
1
Sched
:
7084
,
next
parain
X
=
4655783
,
Y
=
2113066
,
Spd
=
0
.
Hov
=
1
Ctrl
+
N
Ctrl
+
0
Ctrl
+
S
D
:
\
JUKI
\
Too
Is
>
log
2
2
页面设置
Cu
)
.
打印
00
.
. .
Ctrl
+
P
退出
GO
578
.
835699
578
.
835710
578.841399
578
.
841404
578
.
841413
578
.
841418
578.841423
578
.
841427
578
.
841432
578
.
841436
578
.
841446
578
.
841455
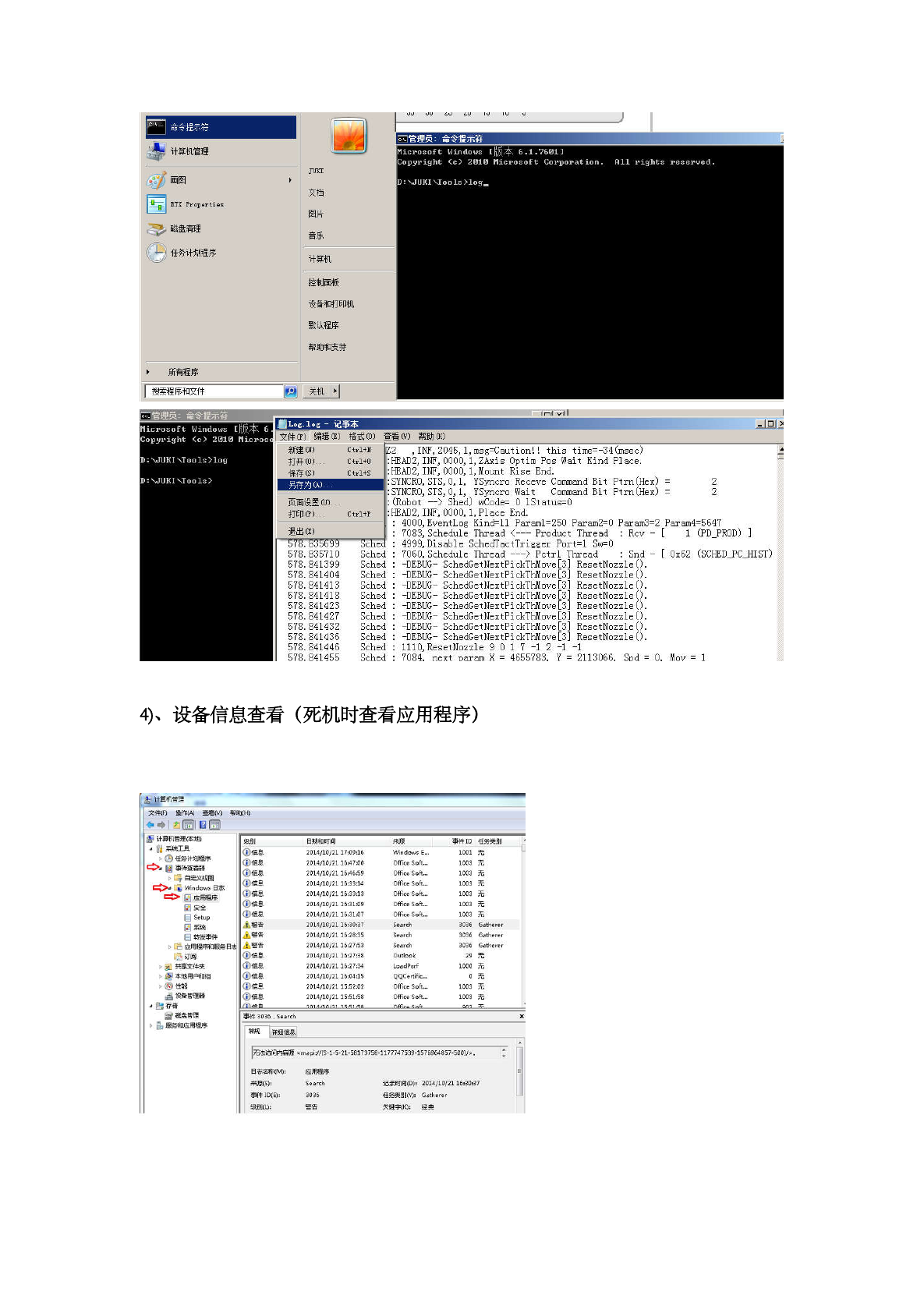
4
)
、
设备信息查看
(
死机时查看应用程序
)
*
迖財
i
'
令峰
’
少
,
國
10
_
善
Iftf
^
CAl
助利
t
计其机
8
理
_
-
S i P
.
I
H
©
任务计
Ov
.
Windows
^
=
>
El
应照拆
B
安全
§
Setup
il
转发
事件
ID
任务英
1001
无
1003
无
1003
9
c
1003
无
1003
无
1003
无
1003
无
3036
Gatherer
3036
Gatherer
3036
Gatherer
29
无
1000
无
0
无
1003
无
1003
无
細
I
曰期
《
1
盯
Ifl
2014
/
10
/
2117
:
09
:
16
2014
/
10
/
211
M
7
M
2014
/
10
/
21
16
)
4659
2014
/
10
/
21
16
:
33
*
14
2014
/
10
/
21
16
:
33
:
13
2014
/
10
/
2116
:
31
:
09
2014
/
10
/
2116
:
31907
2014
/
10
/
2116
:
30
:
37
2014
/
10
/
21
16
:
28
:
35
2014
/
10
/
21
16
:
2753
2014
/
10
/
21
16
:
27
:
38
2014
/
10
/
21
16
:
27
^
4
2014
/
10
/
2116
a
04
d
5
2014
/
10
/
21
15
:
52902
2014
/
10
/
21
15
:
5158
鄉
L
①
朗
①
做
①
朗
①
朗
①
姑
①
成
is
®
i
S
告
①
姑
①
做
①
rss
①
伝
-
§
①
倍
&
/
i
J
作白
Windows
E
-
.
Office
Soft
—
Office
Soft
-
Office
Soft
-
Office
Soft
.
Office
Soft
—
Search
Search
Search
mm
Outlook
LoadPcrf
QQCcrtlfic
—
:
夹
£
Jt
本地用户
W
泪
◎
觸
a
脚
Office
Soft
-
■
*
5
存
《
笤磁
&
S
理
獅
as
用辦
事件
3036
•
Search
详细做
形去访问内苗
®
<
mip
;
^
/
{
S
-
l
-
5
-
21
-
56173758
-
1177747539
-
1576964857
-
500
}
/
>
.
日态名称
CM
)
:
棚
(
S
>
:
挪
ID
(
E
)
:
应用程序
Search
记录时
f
0
(
D
>
:
2014
/
10
/
21
16
:
30
:
37
任钥
^
別
(
Y
)
:
Gatherer
矢埋本
(
K
)
:
g
奥
3036
费宙
在“吸取数据”中更改“吸取角度”注意在此更改了吸取角度时,吸嘴的吸取角度也会转相
应的数量
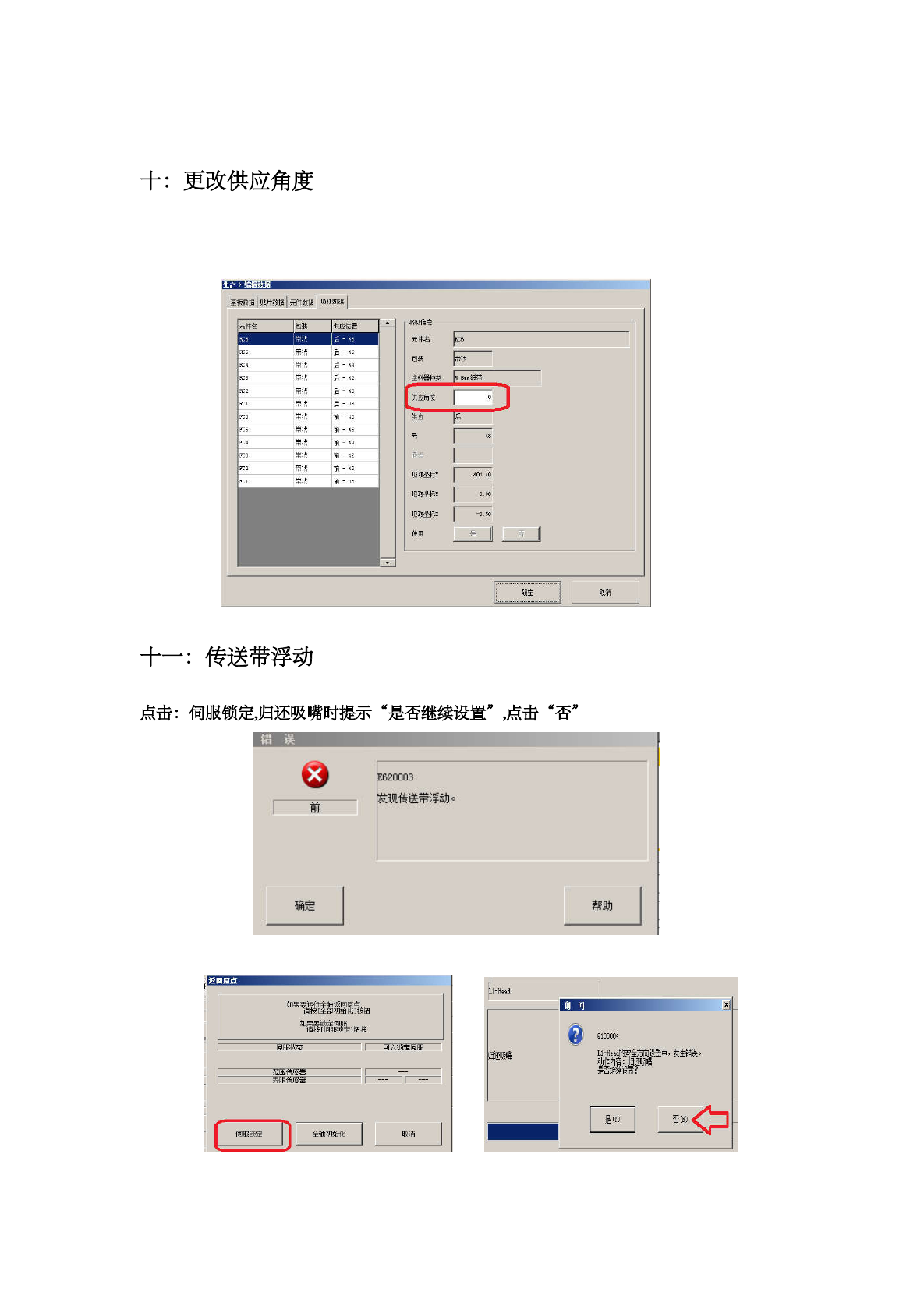
十
:
更改供应角度
基 板
!
元
ft
教
a
D
明
RPHfsS
元件名
m
后
-
后
-
<
1
后
-
4 2
(
5
_
-
38
祐
-
苈
I
+
fast
帝梢
h
Binig
错
m
an
器 种 类
w
®
角
I
?
¥
m
st
*
si
-
<
6
粕
-
VI
祐
-
*
2
相
-
>
M
-
38
宏
1
大
:
S
£
极取坐标
x
宏
1
六
15
取坐桴
x
极取企愤
j
J
使用
m
卜一
:
传送带浮动
点击
:
伺服锁定
,
归还吸嘴时提示
“
是否继续设置
”
,
点击
“
否
E
620003
发现传送带浮动
。
前
确定
帮助
逅回原点
卜
1
-
Head
镧
如顯麵
如果
钮
Q
133004
徇服状态
可以锁萣闸服
㈣
俩辆
p
中
iiip
发生错误
。
imm
固传感器
传感器
S
»
)
伺服浈宝
全油初始化
取消

提示“零部件吸着请去除”时,及时将贴装头移开基板上方,点击确定后,吸嘴上的零件将
全部掉落至基板上。
更改吸嘴外径,根据报警信息,如图:更改吸嘴外径 98000
Q
如果被头零部件吸著请除去
。
十二
:
吸嘴识别错误
1
)
、
外形尺寸识别错误
Q
arf
规證堪
“
inline
确定